TSRS間限速命令狀態的判定及遷移設計的研究
2013-05-08 09:08:34劉棟青
鐵路通信信號工程技術 2013年1期
關鍵詞:設備
劉棟青
(北京全路通信信號研究設計院有限公司,北京 100073)

劉棟青,男,碩士畢業于浙江大學,工程師。主要研究方向為臨時限速服務器,曾參與武廣、京滬、滬寧、滬杭等客運專線臨時限速服務器設備的研制。
1 TSRS間限速的交互
1.1 TSRS間限速命令的主從關系
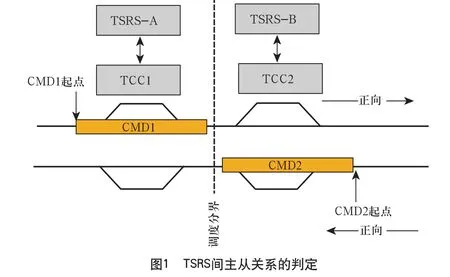
TSRS間主從關系通過限速命令里程標的起點所在位置來判定。限速命令的起點所在限速范圍的TSRS為主控TSRS。如圖1所示,對于臨時限速命令CMD1來說,TSRS-A為主控TSRS,TSRS-B為被控TSRS;對于CMD2來說,TSRS-B為主控TSRS,TSRS-A為被控TSRS。
1.2 TSRS間限速下達流程
跨TSRS的限速命令通過主控TSRS對應的調度臺下達給主控TSRS,主控TSRS將限速命令拆分給自己所管轄的TCC、RBC和被控TSRS,被控TSRS按照主控TSRS下達的命令操作執行,將限速命令拆分下達給自己所管轄的TCC和RBC。
以下文字TSRS-A均代指主控TSRS,TSRS-B均代指被控TSRS。
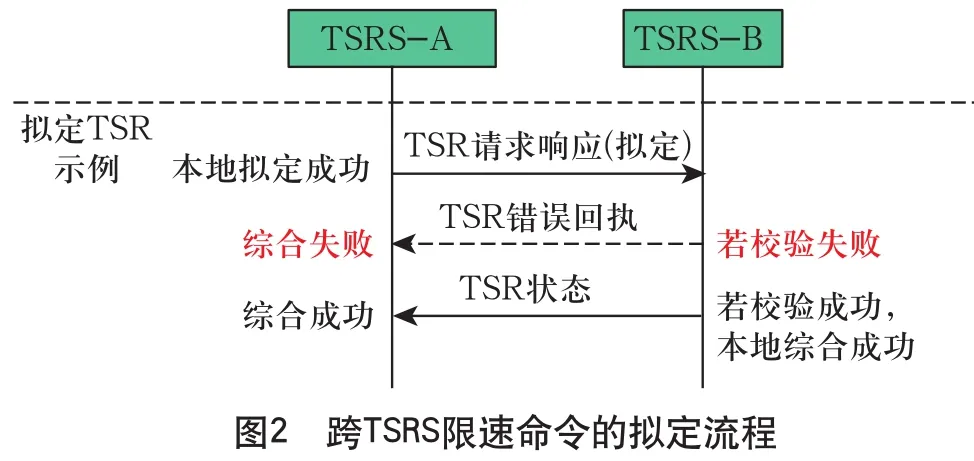
跨TSRS間的限速命令擬定流程如圖2所示,由TSRS-A請求響應擬定TSR; TSRS-B回復擬定校驗結果,由TSRS-A綜合判定TSR狀態。
跨TSRS間的限速命令設置流程如圖3所示,由TSRS-A請求驗證、執行;由TSRS-B回復請求命令響應,TSRS-A綜合判定TSR狀態。

跨TSRS間的限速命令取消流程與被取消命令的擬定、驗證和執行流程一致,如圖4所示,由TSRS-A請求含擬定、驗證和執行取消命令;由TSRS-B回復請求命令響應,TSRS-A綜合判定TSR狀態。
當TSRS已知相鄰TSRS的取消限速執行結果時,TSRS不再發送請求響應消息,而是直接發送本地執行結果給相鄰TSRS,同時本地綜合判定最后限速狀態。
跨TSRS間的限速命令刪除流程如圖5所示,由TSRS-A請求刪除限速命令,同時本地刪除命令,TSRS-B回復刪除結果, TSRS-A綜合判定刪除結果。

2 TSRS間限速命令狀態的綜合判定
TSRS間的限速命令狀態判定原則為:對于提示命令限速,不提示為安全側;對于執行類限速,部分執行態為安全側;對于未執行類限速,未激活態為安全側。
2.1 TSRS間非提示類限速命令狀態的判定
我們討論的限速狀態判定的前提是限速處于確定狀態,當本地子狀態為部分執行,對方子狀態仍為尚在處理中,且為對方主控的命令時,命令不進行綜合判定,防止因本地設備執行過快,命令狀態回退。
假定所有限速命令都由TSRS-A主控,TSRS-B受控,分析主控TSRS的同步判定情況,TSRS間非提示類限速狀態判定結果如表1所示。
2.2 TSRS間限速提示狀態的判定
跨TSRS間的限速命令激活提示或設置提示均由發起方負責向CTC提示,應答方不做相應提示。發起方TSRS-A先判定本地滿足相應提示條件后,再向應答方發送相應提示的請求,應答方TSRS-B經檢測本地滿足設置提示條件,即可回應發起方滿足提示狀態。
假定所有限速命令都由TSRS-A主控,TSRS-B受控,分析主控TSRS的同步判定情況,結果如表2所示。

表1 CRH380AL車載設備相關參數表表1 TSRS間非提示類限速狀態判定表

表2 TSRS間限速提示狀態判定表

續表
2.3 異常情況下限速命令的狀態遷移
限速正常下達流程中的狀態遷移參見2.1的狀態判定,異常情況下相鄰TSRS與本地TSRS通信交互出現問題,限速命令的狀態回復有可能丟失或者通信中斷,限速狀態就有可能會回退或改變,如圖6所示。
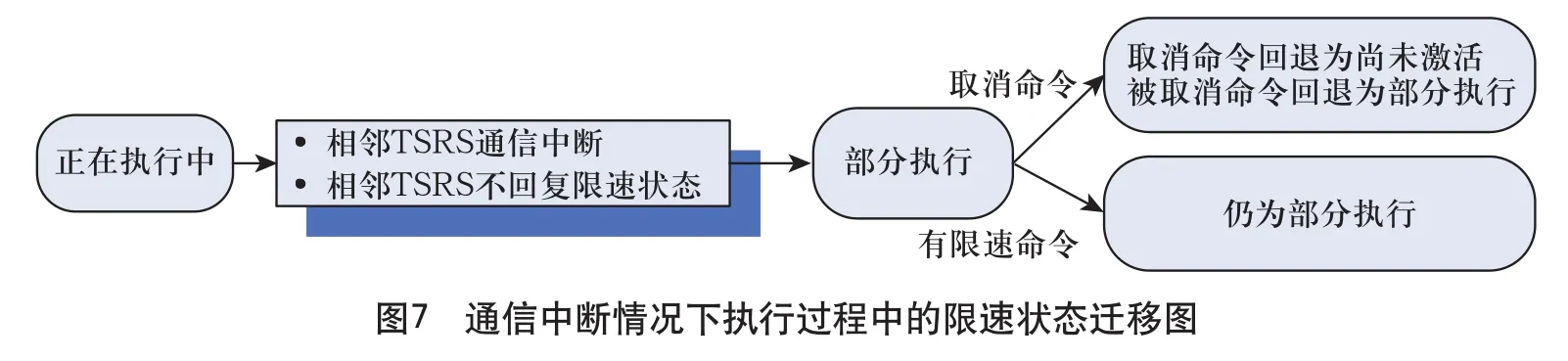
執行過程中的取消限速命令狀態遷移比較特殊。對于取消限速來說,執行失敗的結果為部分執行。但由于TSRS所管轄的設備有可能已經執行取消限速成功,此時取消限速的安全側為尚未激活,被取消限速的安全側為部分執行。調度員經過重新執行和取消才能保證限速涉及的所有設備均執行取消完畢。如圖7所示。

3 涉及三個TSRS的限速狀態判定
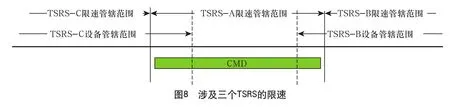
在有些較長的線路比如京滬線有可能會存在涉及3個TSRS的長限速,如圖8所示。其中主控TSRS為中間的TSRS,兩側TSRS均為被控TSRS。限速由中間的TSRS對應的調度臺下達給主控TSRS,然后由主控TSRS分發下達給兩側被控TSRS。被控TSRS綜合本地設備執行結果回復給主控TSRS,由主控TSRS綜合判定限速狀態。
此類限速的狀態判定參考涉及兩個TSRS的限速,主控TSRS先綜合左側被控TSRS的限速狀態,得到中間限速狀態,隨后在一周期內再綜合右側被控TSRS的限速狀態,得到最終的限速狀態。
與涉及兩個TSRS的限速相比,涉及3個TSRS的限速在擬定和刪除流程上更為復雜,會帶來一些問題。由于兩個被控TSRS間沒有限速命令的交互,需要通過中間的主控TSRS傳遞和綜合判定限速狀態,因此當其中一個被控TSRS因某種原因無法擬定或刪除成功時,限速會無法清除。
如圖9所示,在擬定涉及3個TSRS的限速命令時,若被控TSRS-B校驗失敗,回復錯誤消息,則限速命令仍會存留在TSRS-C和TSRS-A中。

在主控TSRS-A綜合判定失敗后,雖然清除了本地限速命令,但由于被控TSRS-C擬定成功,又將該限速命令同步給主控TSRS-A。從而出現,CMD只存在TSRS-C和TSRS-A中,不存在TSRS-B中,在CTC上卻顯示命令擬定成功。
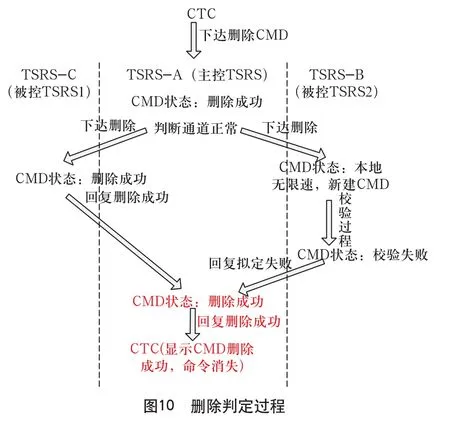
因此類限速無法通過正常途徑清除,所以在刪除判定過程中,若被控TSRS-C回送刪除成功,被控TSRS-B回送因限速規則導致的刪除失敗消息時,則主控TSRS需綜合判定為限速刪除成功并清除掉該限速命令。具體刪除判定過程如圖10所示。
4 總結
TSRS間的限速狀態判定涉及到行車安全,因此在判定限速狀態時需考慮到限速的安全性及適用性,既不能發生限速突然出現的情況,也不能出現限速狀態不穩定的情況,更不能導向非安全側甚至于限速丟失。以上的限速狀態判定方法通過了軟件測試和工程實際應用,是一種有效可行的方案。
[1]鐵運[2012]213號 臨時限速服務器技術規范(暫行)[S].
[2]運基信號[2010]534號 TSRS-TSRS接口規范(V1.0)[S].
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00