虛擬現(xiàn)實(shí)技術(shù)在機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的應(yīng)用
2016-02-16 06:20:23劉艷霞
鐵路計(jì)算機(jī)應(yīng)用 2016年10期
劉艷霞
(呼和浩特鐵路局 科學(xué)技術(shù)研究所,呼和浩特 010052)
虛擬現(xiàn)實(shí)技術(shù)在機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的應(yīng)用
劉艷霞
(呼和浩特鐵路局 科學(xué)技術(shù)研究所,呼和浩特 010052)
文章利用3DsMAX和VRP實(shí)現(xiàn)了HXD3D型電力機(jī)車三維建模和機(jī)車駕駛的虛擬場(chǎng)景,介紹了機(jī)車模擬駕駛訓(xùn)練系統(tǒng)開發(fā)的基本過程。本系統(tǒng)通過對(duì)機(jī)車駕駛操作流程的仿真,為受訓(xùn)司機(jī)提供了一個(gè)具有高度真實(shí)感的駕駛過程。
虛擬現(xiàn)實(shí);3DsMAX;VRP;機(jī)車駕駛
虛擬現(xiàn)實(shí)(VR,Virtual Reality)技術(shù)采用以計(jì)算機(jī)技術(shù)為核心的現(xiàn)代高科技,生成逼真的視、聽、觸覺一體化的特定范圍的虛擬環(huán)境,用戶借助必要的裝備,以自然的方式與虛擬環(huán)境中的對(duì)象進(jìn)行交互作用和相互影響,從而產(chǎn)生身臨其境的感覺和體驗(yàn)。VR得益于現(xiàn)代計(jì)算機(jī)技術(shù)的高速發(fā)展,其應(yīng)用領(lǐng)域日益廣泛,在教育、科研、醫(yī)療、制造、娛樂等領(lǐng)域,虛擬現(xiàn)實(shí)技術(shù)憑借其真實(shí)、可觀、可塑性強(qiáng)等特點(diǎn)展現(xiàn)出強(qiáng)大的優(yōu)勢(shì)。為了更安全、高效地培訓(xùn)司機(jī),使其在實(shí)驗(yàn)環(huán)境中學(xué)習(xí)機(jī)車駕駛的安全操作規(guī)程和培養(yǎng)應(yīng)急處理能力,本文利用虛擬現(xiàn)實(shí)技術(shù)開發(fā)了呼和浩特站至呼和浩特東站機(jī)車模擬駕駛訓(xùn)練系統(tǒng)。
1 機(jī)車模擬駕駛訓(xùn)練系統(tǒng)概況
機(jī)車模擬駕駛訓(xùn)練系統(tǒng)利用虛擬現(xiàn)實(shí)技術(shù)實(shí)現(xiàn)了操作人員對(duì)機(jī)車駕駛室檢查標(biāo)準(zhǔn)化作業(yè)程序的學(xué)習(xí)、練習(xí)、考試模擬和機(jī)車一般操縱程序的練習(xí)。
機(jī)車模擬駕駛訓(xùn)練系統(tǒng)模型包括HXD3D型電力機(jī)車、呼和浩特站至呼和浩特東站的現(xiàn)場(chǎng)實(shí)際線路、站場(chǎng)環(huán)境(線路曲線、接觸網(wǎng)分相、信號(hào)機(jī)位置、道岔類型等)以及線路兩側(cè)可視范圍內(nèi)的大部分建筑物。由于系統(tǒng)中模型數(shù)量龐大,種類眾多,整個(gè)場(chǎng)景的制作有一定的難度。
2 機(jī)車模擬駕駛訓(xùn)練系統(tǒng)開發(fā)設(shè)計(jì)流程
機(jī)車模擬駕駛訓(xùn)練系統(tǒng)開發(fā)設(shè)計(jì)流程如圖1所示。
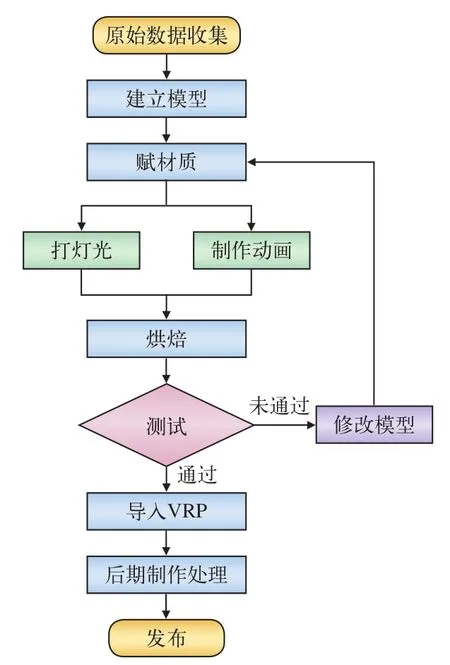
圖1 機(jī)車模擬駕駛訓(xùn)練系統(tǒng)開發(fā)設(shè)計(jì)流程圖
從以上流程不難看出,機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的制作主要分為HXD3D型電力機(jī)車和其所在場(chǎng)景的三維建模以及在VRP中漫游功能的實(shí)現(xiàn)。
3 機(jī)車和所在場(chǎng)景的三維建模
3.1 原始數(shù)據(jù)的收集
根據(jù)HXD3D型電力機(jī)車、呼和浩特站至呼和浩特東站現(xiàn)場(chǎng)的實(shí)際情況,我們對(duì)機(jī)車、現(xiàn)場(chǎng)實(shí)際線路、站場(chǎng)環(huán)境和機(jī)車駕駛路徑兩側(cè)建筑物采集了高清照片、錄像數(shù)據(jù),并通過業(yè)務(wù)部門搜集到了線路、站場(chǎng)設(shè)備(線路曲線、接觸網(wǎng)分相、信號(hào)機(jī)位置、道岔類型等)的有效參數(shù)。本系統(tǒng)中通過線路詳細(xì)的CAD圖紙、谷歌地圖截圖和現(xiàn)場(chǎng)錄像資料,為場(chǎng)景的定位提供了精確的依據(jù);高清照片為后期建模制作貼圖提供了重要依據(jù)。
3.2 三維模型的創(chuàng)建
三維建模階段是機(jī)車模擬駕駛訓(xùn)練系統(tǒng)制作流程中的關(guān)鍵階段之一,本階段必須完成系統(tǒng)中所有場(chǎng)景三維模型的創(chuàng)建和集成(包括機(jī)車、鐵路線路場(chǎng)景及其兩側(cè)的建筑場(chǎng)景),如圖2所示。在采集照片處理的基礎(chǔ)上,3DsMAX建出能將圖片合適貼上的模型,將處理好的圖片通過材質(zhì)球貼到模型對(duì)應(yīng)的位置上。全部模型建成后,經(jīng)過調(diào)整和優(yōu)化場(chǎng)景,打上主光源和輔光源,制作完成所需動(dòng)畫,進(jìn)行烘焙、測(cè)試以及修改后導(dǎo)入到VR-Platform虛擬現(xiàn)實(shí)平臺(tái)軟件中進(jìn)行下一階段功能的編輯。

圖2 HXD3D型電力機(jī)車及其場(chǎng)景三維模型
4 機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的功能實(shí)現(xiàn)
本系統(tǒng)利用虛擬現(xiàn)實(shí)平臺(tái)(VRP,VR-Platform)軟件實(shí)現(xiàn)漫游功能。在VRP編輯器中,利用界面編輯功能對(duì)導(dǎo)入的系統(tǒng)進(jìn)行界面設(shè)計(jì),實(shí)現(xiàn)所需的實(shí)時(shí)漫游和人機(jī)交互功能后打包生成可獨(dú)立執(zhí)行的Exe文件,最后將制作完成的Exe文件集成到機(jī)車駕駛模擬演練平臺(tái)中(可以用Flash制作界面)對(duì)應(yīng)的位置,點(diǎn)擊后調(diào)用運(yùn)行。
4.1 VRP軟件
目前,基于三維模型的實(shí)時(shí)場(chǎng)景驅(qū)動(dòng)工具種類繁多,如:VRP、Unity3D、Virtools、Quest3D等商業(yè)化軟件。其中,VRP是我國(guó)開發(fā)的具有自主知識(shí)產(chǎn)權(quán)的一款三維虛擬現(xiàn)實(shí)平臺(tái)軟件,采用全中文界面,學(xué)習(xí)制作虛擬軟件的人極易上手。除此之外,VRP采用了可視化的編輯界面,通過簡(jiǎn)單的語(yǔ)句對(duì)程序模塊進(jìn)行搭建即可實(shí)現(xiàn)復(fù)雜的交互功能,避免了其他三維虛擬現(xiàn)實(shí)軟件重復(fù)繁瑣的編程。
4.2 漫游功能設(shè)計(jì)
漫游系統(tǒng)具備的首要功能就是漫游,在虛擬現(xiàn)實(shí)仿真中,漫游主要有兩種方式:自主漫游和固定路徑漫游。
(1)自主漫游
自主漫游的自由度較高,用戶可以根據(jù)自己的意愿,在虛擬場(chǎng)景中實(shí)現(xiàn)全方位多角度實(shí)時(shí)漫游。
本系統(tǒng)通過設(shè)置幾個(gè)不同視角的繞物旋轉(zhuǎn)相機(jī),完成機(jī)車駕駛操作時(shí)切換視角,實(shí)現(xiàn)了自主漫游功能。
(2)固定路徑漫游
固定路徑漫游是在自主漫游的基礎(chǔ)上實(shí)現(xiàn)的。在場(chǎng)景的測(cè)試狀態(tài)下,進(jìn)入定點(diǎn)相機(jī)視角,錄制相機(jī)的漫游路線,保存到動(dòng)畫相機(jī)列表中,只要回放或調(diào)整播放順序即可實(shí)現(xiàn)各種不同效果的固定路徑漫游。或者在3DsMAX中制作好固定路徑的剛體動(dòng)畫,導(dǎo)入VRP中,在控件按鈕的腳本中寫入播放這個(gè)剛體動(dòng)畫的命令,實(shí)現(xiàn)固定路徑的漫游功能。
本系統(tǒng)在VRP中設(shè)置了一個(gè)跟隨相機(jī),操作者先在繞物旋轉(zhuǎn)相機(jī)狀態(tài)下完成一系列模擬駕駛操作后,切換到跟隨相機(jī)視角,實(shí)現(xiàn)駕駛機(jī)車從呼和浩特站出發(fā)至呼和浩特東站的固定路徑漫游功能。具體實(shí)現(xiàn)方法為,在3DsMAX場(chǎng)景中,將HXD3D機(jī)車中所有模型打成一個(gè)組,鏈接在一個(gè)虛擬體上,將虛擬體以約束路徑的方式約束在提前畫好的從呼和浩特站出發(fā)至呼和浩特東站鐵路線的中心線上,完成機(jī)車內(nèi)所有模型沿著固定路徑漫游的剛體動(dòng)畫,導(dǎo)入到VRP中。在機(jī)車駕駛室內(nèi)設(shè)置一個(gè)觀察位置合適的跟隨相機(jī),然后在機(jī)車操控臺(tái)進(jìn)行某一系列操作(即機(jī)車模擬駕駛需要的操作)之后播放這個(gè)剛體動(dòng)畫,實(shí)現(xiàn)操作者從呼和浩特站虛擬駕駛至呼和浩特東站的功能,如圖3所示。

圖3 機(jī)車駕駛過程的仿真模擬
4.3 交互功能設(shè)計(jì)
圖3中左下角的按鈕、圖片等,可以在初級(jí)頁(yè)面中設(shè)置完成,也可以在高級(jí)頁(yè)面中完成。如果初級(jí)頁(yè)面“創(chuàng)建新面板”中按鈕、導(dǎo)航圖、圖片、色塊、開關(guān)、畫中畫、指北針滿足不了設(shè)計(jì)的需要,可以在高級(jí)頁(yè)面的控件下選擇所需的控件,通過在控件上輸入文字或者貼圖滿足設(shè)計(jì)外觀的要求,在控件屬性的腳本中寫入調(diào)用相機(jī)、時(shí)間軸、剛體動(dòng)畫、柔體動(dòng)畫和骨骼動(dòng)畫等命令實(shí)現(xiàn)想要的功能。
VRP腳本主要依靠函數(shù)來實(shí)現(xiàn)各種功能。主要函數(shù)類型有系統(tǒng)函數(shù)、自定義函數(shù)及觸發(fā)函數(shù)。
(1)系統(tǒng)函數(shù)
主要用于設(shè)置系統(tǒng)最初運(yùn)行啟動(dòng)后出現(xiàn)的事件,如打開漫游系統(tǒng)時(shí)對(duì)一些參數(shù)進(jìn)行特定設(shè)置或開啟一些功能,比較常見的設(shè)置有執(zhí)行Exe程序、加載lua文件、顯示隱藏物體、顯示隱藏控件、設(shè)置控件參數(shù)、定義變量、切換相機(jī)、播放音樂、播放動(dòng)畫等。
(2)觸發(fā)函數(shù)
觸發(fā)函數(shù)是用來對(duì)某一個(gè)物體或按鈕設(shè)置一個(gè)觸發(fā)事件的腳本函數(shù)
以機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的機(jī)車一般程序操縱練習(xí)為例,操作者在對(duì)駕駛室的手柄、按鈕、大閘、小閘等進(jìn)行一系列操作后,機(jī)車開始啟動(dòng)。這個(gè)過程中點(diǎn)擊大閘至初制位、側(cè)緩小閘都可以打開相關(guān)窗口,就是在物體上添加觸發(fā)函數(shù)實(shí)現(xiàn)的。
例如,點(diǎn)擊大閘至初制位的觸發(fā)函數(shù)制作過程如下:在VRP創(chuàng)建對(duì)象下的三維模型中,點(diǎn)中大閘模型(或者新建一個(gè)完全能覆蓋住大閘的觸發(fā)物體,在材質(zhì)中設(shè)為整體透明),在其右側(cè)動(dòng)作列表下的鼠標(biāo)事件中設(shè)置腳本,假設(shè)是左鍵按下觸發(fā)圖4所示窗口,則鼠標(biāo)左鍵按下的腳本中寫入命令為:
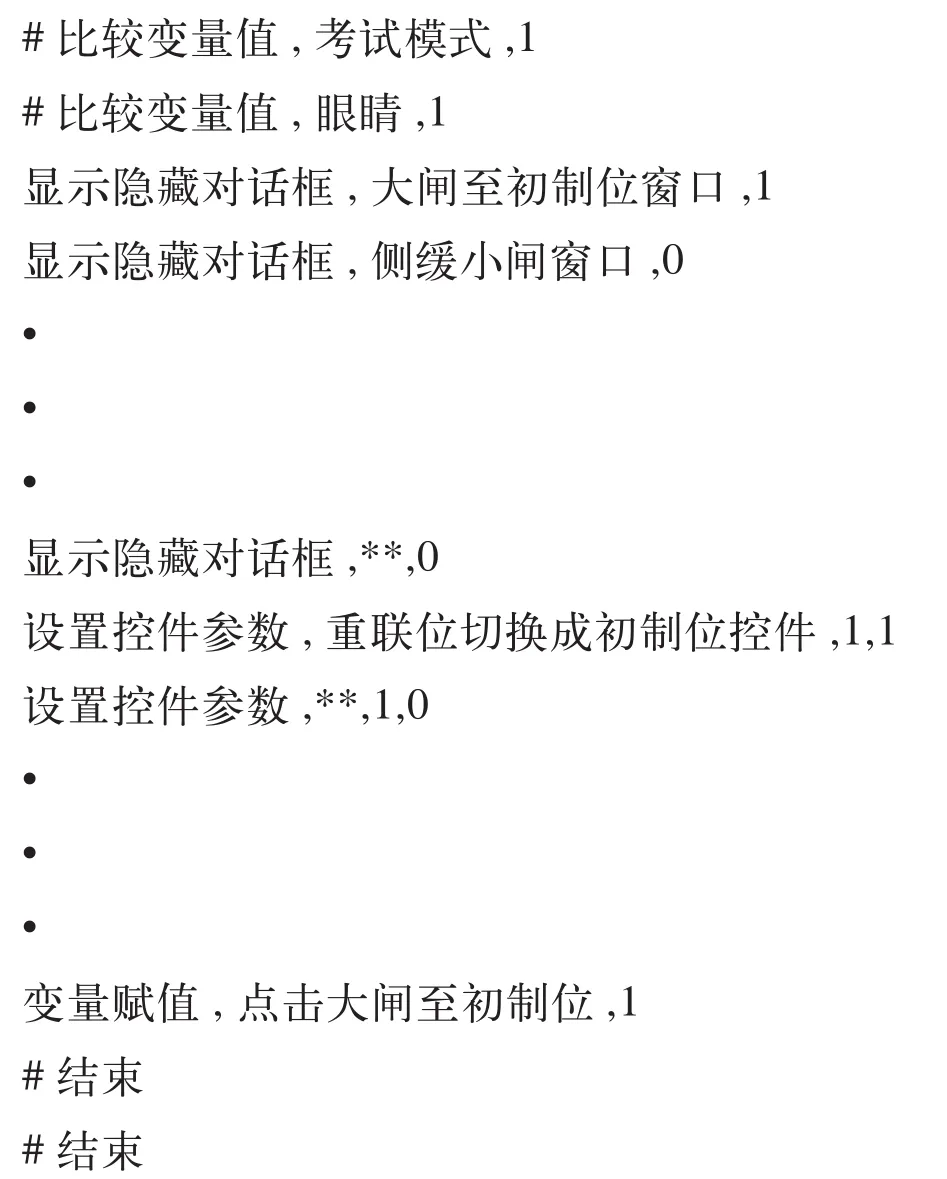
以上腳本中,顯示隱藏對(duì)話框中,1代表顯示,0代表不顯示,設(shè)置控件參數(shù)中,1代表可用,0代表禁用。上述腳本可理解為左鍵點(diǎn)擊大閘模型后系統(tǒng)中僅讓大閘至初制位窗口顯示,其它對(duì)話框都隱藏,控件中只有大閘至初制位窗口上的控件(即重聯(lián)位切換成初制位控件)可用,實(shí)現(xiàn)了設(shè)計(jì)功能。

圖4 點(diǎn)擊大閘觸發(fā)大閘至初制位窗口事件
要完成點(diǎn)擊大閘至初制位這個(gè)功能,大閘至初制位窗口中顯示為重聯(lián)位這個(gè)控件的腳本中,寫入播放3DsMAX場(chǎng)景中制作導(dǎo)入到VRP的大閘上的骨骼動(dòng)畫命令即可。
(3)自定義函數(shù)
自定義函數(shù)是設(shè)計(jì)者自己定義的一組腳本函數(shù)。腳本編輯器中提供的系統(tǒng)定義函數(shù)無法滿足制作需求時(shí),設(shè)計(jì)者可以根據(jù)需求自行編寫調(diào)用函數(shù)。
自定義函數(shù)一般在控件屬性的腳本(例如:鼠標(biāo)點(diǎn)擊)中寫入命令,腳本中可寫入的命令和觸發(fā)函數(shù)命令一樣,在此不再贅述。
VRP交互功能設(shè)計(jì)的過程為:在創(chuàng)建模型級(jí)別下的相機(jī)中創(chuàng)建好所需的數(shù)個(gè)相機(jī);在時(shí)間軸級(jí)別下設(shè)置好所需的時(shí)間軸;在初級(jí)頁(yè)面、高級(jí)頁(yè)面下設(shè)置好所需的控件、對(duì)話框。先新建完成系統(tǒng)函數(shù)寫入所需命令語(yǔ)句,雙擊Exe文件后呈現(xiàn)模型、場(chǎng)景及其控件、對(duì)話框,然后逐一在各個(gè)模型、控件腳本中寫入各種命令實(shí)現(xiàn)所需功能。腳本命令有:切換相機(jī),實(shí)現(xiàn)所在模型、場(chǎng)景和其它模型、場(chǎng)景的相互切換;顯示隱藏物體、控件等,實(shí)現(xiàn)切換相機(jī)后所需物體、控件的顯示和不需物體、控件的隱藏;順序、倒序播放時(shí)間軸,實(shí)現(xiàn)順序拆分、組裝模型;設(shè)置定時(shí)器等。簡(jiǎn)而言之,機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的交互功能設(shè)計(jì)就是設(shè)計(jì)者在場(chǎng)景中各模型、控件腳本中各種命令按邏輯思維順序?qū)懭搿⒄{(diào)用的過程。
5 結(jié)束語(yǔ)
本文主要對(duì)基于VRP的虛擬場(chǎng)景漫游系統(tǒng)的構(gòu)建與實(shí)現(xiàn)進(jìn)行了研究,總結(jié)了機(jī)車模擬駕駛訓(xùn)練系統(tǒng)的開發(fā)過程和技術(shù),該系統(tǒng)實(shí)現(xiàn)了場(chǎng)景較為復(fù)雜的機(jī)車駕駛及其在三維場(chǎng)景的行駛,可以較好地培養(yǎng)司機(jī)學(xué)習(xí)機(jī)車駕駛的安全操作規(guī)程和應(yīng)急處理能力。當(dāng)然,本文用于機(jī)車行駛的操作僅限于鼠標(biāo)、鍵盤,今后將在這一方面繼續(xù)完善,對(duì)機(jī)車的外部操作將使用電控制動(dòng)控制器(大閘)、停放制動(dòng)按鈕、腳踏沙閥等實(shí)際機(jī)車設(shè)備,力求操作者在機(jī)車駕駛中有更真實(shí)可信的體驗(yàn)。
[1]趙 青,李欣亮.基于3DSMAX 的虛擬現(xiàn)實(shí)建模技術(shù)研究[J].電子技術(shù)與軟件工程,2016(2).
[2]劉廣文.基于虛擬現(xiàn)實(shí)技術(shù)的機(jī)車駕駛模擬演練系統(tǒng)的研究與實(shí)現(xiàn)[J].鐵路計(jì)算機(jī)應(yīng)用,2016,25(4):55-57.
[3]范書恒,宋亞奪.基于虛擬現(xiàn)實(shí)技術(shù)的車站站場(chǎng)建模關(guān)鍵問題的研究[J].鐵路計(jì)算機(jī)應(yīng)用,2015, 24(6):14-16.
[4]張 菁,張?zhí)祚Y,陳懷友.虛擬現(xiàn)實(shí)技術(shù)及應(yīng)用[M].北京:清華大學(xué)出版社,2011:1-4.
責(zé)任編輯 王 浩
Virtual reality technology applied to Locomotive Simulation Driving Training System
LIU Yanxia
( Institute of Scientifc Research,Hohhot Railway Administration,Hohhot 010052,China)
In this article,3DsMAX and VRP were used to implement the 3D modeling of HXD3D electric locomotive and the virtual scene of locomotive driving.The article introduced the basic process of the Locomotive Simulation Driving Training System.Through the simulation of operation flow for locomotive driving,the System provided trainees with a highly realistic driving process.
virtual reality;3DsMAX;virtual reality platform(VRP);locomotive driving
U264∶TP39
A
1005-8451(2016)10-0062-04
2016-05-05
呼和浩特鐵路局科研計(jì)劃重大課題(2014A001)。
劉艷霞,工程師。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 鐵路計(jì)算機(jī)應(yīng)用的其它文章
- 2016年度《鐵路計(jì)算機(jī)應(yīng)用》全路通訊員崗位培訓(xùn)圓滿結(jié)束
- 通過互聯(lián)網(wǎng)訪問鐵路內(nèi)網(wǎng)Web Service技術(shù)的研究與實(shí)現(xiàn)
- 基于認(rèn)知負(fù)荷理論的鐵路自動(dòng)售票機(jī)交互設(shè)計(jì)
- Solr在樂齡易購(gòu)網(wǎng)站中的應(yīng)用
- SCADA技術(shù)在隧道防災(zāi)救援設(shè)備監(jiān)控系統(tǒng)中的應(yīng)用
- 鐵路工程管理平臺(tái)電子施工日志系統(tǒng)及應(yīng)用