鴨式旋轉(zhuǎn)機翼飛機過渡段旋翼卸載特性分析
2014-09-15 07:49:30史振興高正紅
飛行力學(xué) 2014年4期
關(guān)鍵詞:飛機
史振興, 高正紅
(西北工業(yè)大學(xué) 翼型葉柵空氣動力學(xué)國家重點實驗室, 陜西 西安 710072)
0 引言
旋轉(zhuǎn)機翼飛機是一種兼具直升機垂直起降與固定翼飛機高速巡航特征的新概念航空飛行器。它包括三種飛行模式[1]:旋翼飛行模式、固定翼飛行模式以及兩種模式之間相互轉(zhuǎn)換的過渡飛行模式。旋轉(zhuǎn)機翼飛機最大的特征就是擁有一副既可以高速旋轉(zhuǎn)作為旋翼,又可以鎖定作為固定翼的主機翼。當飛機以旋翼模式飛行時,旋轉(zhuǎn)機翼高速旋轉(zhuǎn)作為旋翼使得飛機能夠像普通直升機一樣垂直起降和低速飛行;當旋轉(zhuǎn)機翼鎖定作為固定翼時,飛機以固定翼模式飛行,徹底消除了旋翼旋轉(zhuǎn)引起的氣流不對稱對直升機飛行速度的限制,從而使得飛機能夠以更高的速度實現(xiàn)高效巡航飛行。
旋轉(zhuǎn)機翼飛機的布局有多種形式,其中以鴨式三翼面布局最為常見。鴨式旋轉(zhuǎn)機翼飛機的氣動布局特點是具有較大尺寸的鴨翼和水平尾翼。在旋翼飛行模式下,旋翼為主要的升力面;在固定翼巡航狀態(tài)下,鴨翼、尾翼與旋轉(zhuǎn)鎖定后的主機翼組成三翼面布局,共同提供升力;在過渡飛行階段,由主旋翼和鴨翼、尾翼共同承擔升力。為了確保過渡飛行安全、順利的進行,要求主旋翼和機翼氣動力的合理匹配來克服飛機飛行過程中的重力與阻力。
本文通過對鴨式旋轉(zhuǎn)機翼飛機過渡飛行模式的特性分析,定義出了飛機轉(zhuǎn)換過程中的低速邊界和高速邊界。飛機只有在兩條邊界之間進行轉(zhuǎn)換飛行才是安全可行的。同時提出了一種以旋翼總距和前飛速度為控制量組成轉(zhuǎn)換邊界的分析方法,并以實驗室某40 kg級飛機為樣機,對該方法進行了驗證。
1 過渡飛行模式
鴨式旋轉(zhuǎn)機翼飛機的過渡飛行模式包括兩種不同的過程:一種是從旋翼飛行模式轉(zhuǎn)換到固定翼模式的旋翼卸載模態(tài),另一種是從固定翼模式轉(zhuǎn)換到旋翼飛行模式的旋翼加載過程。本文只針對旋翼卸載模態(tài)進行分析。
鴨式旋轉(zhuǎn)機翼飛機以旋翼模式飛行時,可實現(xiàn)垂直起飛、懸停與低速前飛。當以旋翼模式進行小速度前飛時,旋翼既需要提供平衡重量所需的拉力又需要提供前飛需用的動力。當前飛速度達到一定值時,操縱槳盤使飛機的機身迎角變?yōu)?°,此時飛機旋轉(zhuǎn)機翼槳盤在水平面內(nèi)。與此同時,發(fā)動機開始給前拉螺旋槳輸出動力,飛機進入旋翼卸載模態(tài)。
在飛機進入旋翼卸載過渡模式時,旋翼需要不斷地卸載,前拉螺旋槳需要不斷地加載以完成飛機從旋翼模式過渡到固定翼模式。在過渡過程中,為了降低旋翼的氣動干擾,要求飛機的機身保持小迎角姿態(tài)(可假設(shè)迎角保持為0°),同時旋翼在一定轉(zhuǎn)速條件下,通過降低旋翼的總距使其卸載。當飛機旋翼卸載到零時,旋翼系統(tǒng)對于飛機本體而言幾乎不提供拉力,再降低旋翼轉(zhuǎn)速直至將旋翼完全鎖定為固定翼,此時旋翼完成了卸載與飛行模式的轉(zhuǎn)換。
2 轉(zhuǎn)換邊界
在旋翼卸載過程中,前拉發(fā)動機的拉力用來克服飛行阻力,使飛機加速。要使飛機能夠平穩(wěn)地進行轉(zhuǎn)換,飛行員必須要清楚飛機在某一旋翼功率下的轉(zhuǎn)換速度范圍。轉(zhuǎn)換速度過低,飛機鴨翼、尾翼和旋翼共同產(chǎn)生的升力不足以克服重力;轉(zhuǎn)換速度太高,飛機又受到發(fā)動機可用輸出功率的限制[2]。在旋翼卸載過程中轉(zhuǎn)速保持不變,旋翼功率的多少直接反映在旋翼總距的大小上。因此要想實現(xiàn)水平過渡飛行,就必須清楚旋翼總距隨前飛速度的變化規(guī)律。這就形成了以前飛速度和旋翼總距為控制參數(shù)的一個轉(zhuǎn)換邊界。本文旨在從最低轉(zhuǎn)換速度到最高轉(zhuǎn)換速度這兩個方面入手,研究飛機旋翼卸載過渡過程。為了使研究方便簡單,認為飛機在過渡轉(zhuǎn)換過程中的某一狀態(tài)時的加速度比較小,近似為零,飛機處于穩(wěn)定飛行狀態(tài)。
2.1 最低速度轉(zhuǎn)換邊界
鴨式旋轉(zhuǎn)機翼飛機上各個部件所受的外力圖如圖1所示。假設(shè)發(fā)動機推力與機身升阻力都通過重心。根據(jù)圖1可得如下縱向力平衡關(guān)系[3]:
Tcosαf-Hsinαf+Lc+Lf+Lh=G+Gf
-Tsinαf+Tl=Dc+Df+Dh+Hcosαf
Lcxc+(Tsinαf+Hcosαf)zr-(Tcosαf-
Hsinαf)xr+Dhzh-Lhxh-Dczc=0
式中,Lc,Dc,Lh,Dh,Lf及Df分別為鴨翼、尾翼、機身的升力和阻力;xc,zc,xr,zr,xh及zh分別為鴨翼、旋翼、平尾氣動力焦點到重心的水平距離和垂直距離;Gf為過渡模式下旋翼旋轉(zhuǎn)對機身的垂直增重;Tl為前拉發(fā)動機拉力。
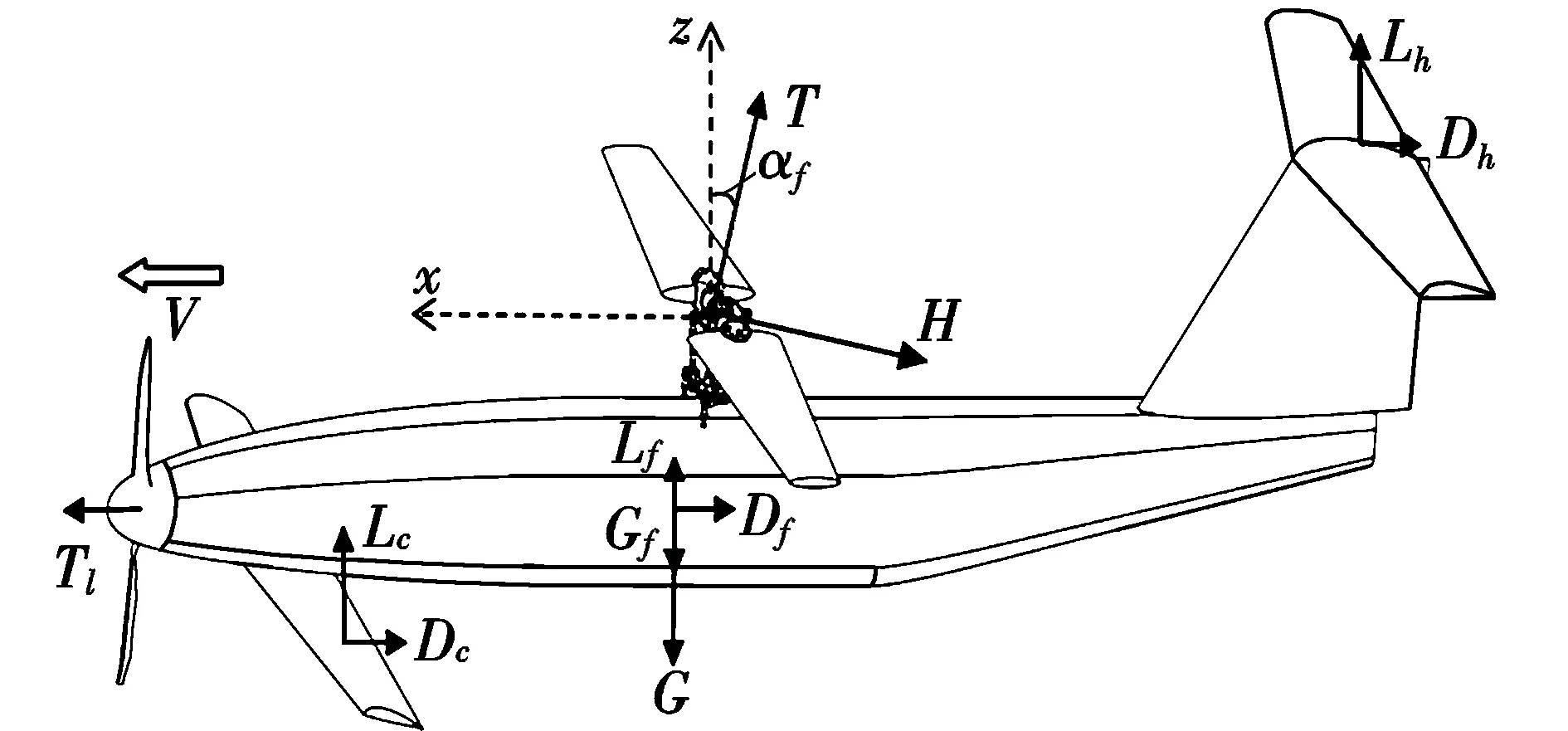
圖1 作用在飛機上的外力Fig.1 Forces on aircraft
旋轉(zhuǎn)機翼飛機在過渡過程中,飛機的重量由旋翼和飛機固定翼升力面共同承擔。將鴨翼、尾翼升力表達式代入上式可得:
(1/2)ρv2(ScCyc+ShCyh)=G+Gf-Lf-Tsinαf
當旋翼總距固定在某一確定值時,要想轉(zhuǎn)換速度達到最小,由上式可知,ScCyc+ShCyh必須達到最大。因此本文首先利用旋轉(zhuǎn)機翼飛機旋翼飛行模式確定過渡過程中旋翼總距的變化范圍,在這個變化范圍內(nèi)取某一總距定值,在過渡段分別取鴨翼迎角為可用最大迎角或尾翼迎角為可用最大迎角,通過力矩平衡方程求得各部件氣動力來尋求ScCyc+ShCyh的最大值,從而求得轉(zhuǎn)換速度的最小值。該最小轉(zhuǎn)換速度與當前的總距值可構(gòu)成低速邊界中的一點。當選取的總距值在可變化的范圍內(nèi)移動時,就得到了一條獨特的最低轉(zhuǎn)換速度邊界。
過渡轉(zhuǎn)換過程飛機總距-速度的最低轉(zhuǎn)換速度邊界計算流程如圖2所示。

圖2 最低轉(zhuǎn)換速度邊界計算流程Fig.2 Calculation process of the lowest conversion speed boundary
2.2 最高速度轉(zhuǎn)換邊界
在卸載過程中,飛機的最高轉(zhuǎn)換速度受到多方面的限制,如旋翼系統(tǒng)中前行槳葉的壓縮性、后行槳葉的失速效應(yīng)以及整個飛機發(fā)動機可用功率的限制。最值得注意的是飛機發(fā)動機的可用功率,它是制約飛機最大轉(zhuǎn)換速度最重要的因素。本文通過分析飛機在過渡過程中所需的功率與發(fā)動機所能提供的最大功率進行比較,從而確定飛機的高速邊界。
旋轉(zhuǎn)機翼在前飛過程消耗的總功率PT由三部分組成,分別為型阻功率Pkd、誘導(dǎo)功率Pki及其他功率Pkt。利用前飛滑流理論與前飛葉素理論相結(jié)合的方法可求得旋轉(zhuǎn)機翼前飛時槳盤的誘導(dǎo)速度,從而求得需用功率。
根據(jù)前飛滑流理論[4-5]可知:


根據(jù)前飛葉素理論,誘導(dǎo)速度取到一階諧波,即:
v1=v0+v1ccosψ+v1ssinψ
將兩種理論得到的公式相結(jié)合,首先設(shè)定一個v0的初始值,由葉素理論求出一個拉力系數(shù)CT值,再由這個值通過滑流理論求出v1,將其作為葉素理論的常值v0,如此循環(huán)迭代求解出最終的拉力系數(shù)和平均誘導(dǎo)速度值。
型阻功率:
Pkd=σCD0.7KP/4
KP=(1+5μ2)KP0
式中,KP0為懸停狀態(tài)型阻功率修正系數(shù),其與槳葉根梢比有以下近似關(guān)系[4]:
誘導(dǎo)功率:
式中,J0為懸停狀態(tài)的誘導(dǎo)功率修正系數(shù)[4]。
其他功率:
Pkt=CT(-λ0)-CHμ
旋轉(zhuǎn)機翼總功率:
PT=Pkd+Pki+Pkt
飛機阻力:
D=Dc+Dh+Df+Dt
式中,Dc,Dh及Df分別為鴨翼、尾翼及機身的阻力;Dt為旋翼后向力。
則前拉螺旋槳需用功率:
在偉晶作用發(fā)育的全過程中,不是所有偉晶巖區(qū)的偉晶巖脈中都可以見到偉晶巖各結(jié)構(gòu)帶,只在一些典型的脈中能夠見到。特別是構(gòu)造活動頻繁、圍巖滲透性較強的地區(qū)形成的偉晶巖,往往不具有良好的帶狀構(gòu)造,各種礦物組合在脈中分布無明顯的規(guī)律[9]。
PL=DV0
發(fā)動機所需的總功率系數(shù):
P=PT/ηT+PL/ηL
式中,ηT,ηL分別為發(fā)動機到旋翼系統(tǒng)和前拉螺旋槳系統(tǒng)的傳遞損失系數(shù)。
在旋翼卸載過程中,隨著前飛速度的不斷增大,飛機需用功率逐漸增大。旋轉(zhuǎn)機翼飛機過渡段高速邊界在滿足力與力矩平衡的前提下還應(yīng)確保飛機的需用功率P不能大于發(fā)動機的額定輸出功率Pe,即:
P≤Pe
過渡轉(zhuǎn)換過程飛機總距-速度的最高轉(zhuǎn)換速度邊界計算流程如圖3所示。
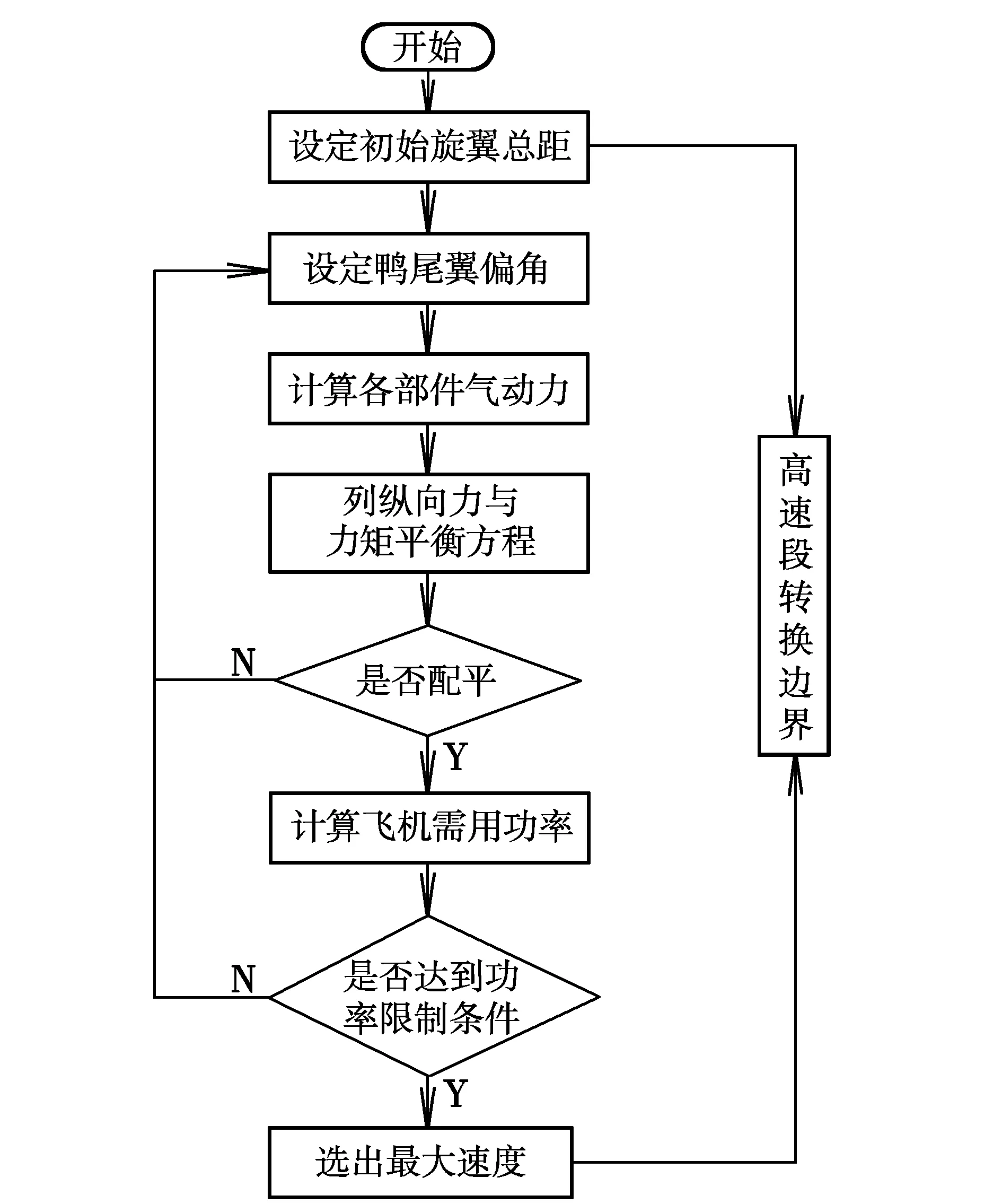
圖3 最高轉(zhuǎn)換速度邊界計算流程Fig.3 Calculation process of the highest conversion speed boundary
最高轉(zhuǎn)換速度邊界前半部分的計算流程如同最低轉(zhuǎn)換速度邊界,在確定總距的變化范圍后,通過平衡方程計算在某一特定總距下,隨著前飛速度的不斷增加,飛機在過渡過程中需用功率的變化范圍,再與發(fā)動機的額定功率進行比較,得出能達到的最大速度,最終得出過渡段的最高轉(zhuǎn)換速度邊界。
3 算例分析
為了驗證上述方法的有效性,本文采用自行研制的某40 kg級旋轉(zhuǎn)機翼飛行原理試驗驗證機為樣機,計算過渡模式下旋翼總距隨速度變化的轉(zhuǎn)換邊界。該飛機采用三翼面布局,鴨翼、尾翼采用優(yōu)化后的低雷諾數(shù)翼型,旋翼為兩片剛性槳葉,翼型采用14%厚度的橢圓翼型。該飛機有旋翼系統(tǒng)和前拉系統(tǒng)兩套動力輸出裝置,由一臺中央發(fā)動機通過一套離合機構(gòu)實現(xiàn)對兩套動力裝置的功率輸出與分配。該飛機的主要參數(shù)與傳動系數(shù)為:飛機的質(zhì)量為40 kg,總距的變化范圍為0°~9°,旋翼轉(zhuǎn)速為1 800 r/min,旋翼直徑為1.7 m,旋翼面積為0.29 m2,鴨翼面積為0.25 m2,尾翼面積為0.26 m2,發(fā)動機額定功率為8 kW,旋翼傳動損失系數(shù)為0.77,前拉螺旋槳損失系數(shù)為0.8。
該樣機采用全動的鴨翼和尾翼,飛機懸停時旋翼總距為9°。鴨翼和尾翼的氣動力數(shù)據(jù)以及旋翼翼型的氣動力數(shù)據(jù)都是由風(fēng)洞實驗得到的。
圖4給出了旋轉(zhuǎn)機翼飛機低速段旋翼總距與速度的最低轉(zhuǎn)換速度邊界。由圖4可以看出,飛機開始轉(zhuǎn)換時的最小速度不低于7.2 m/s,轉(zhuǎn)換結(jié)束后飛機的最小飛行速度為30.6 m/s。
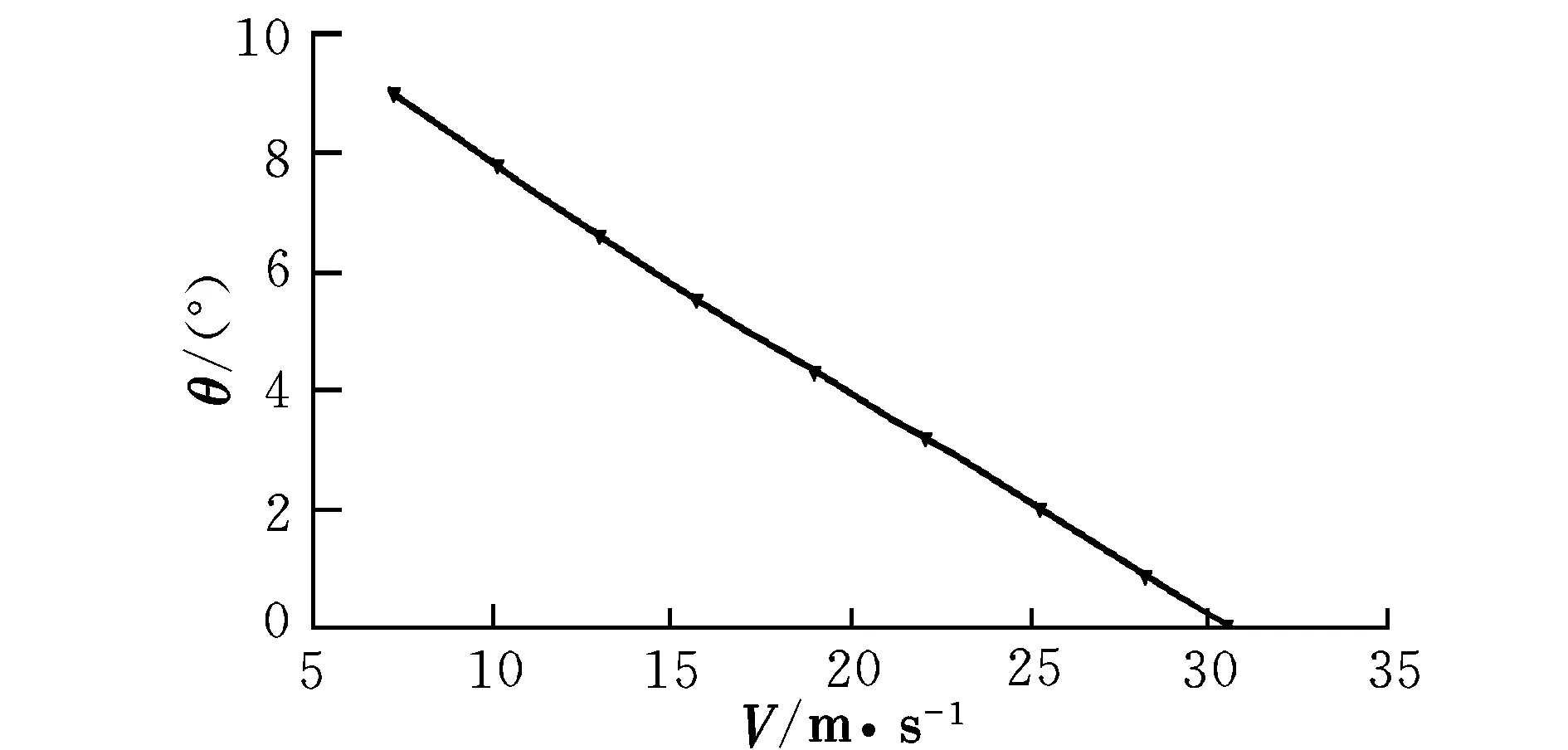
圖4 低速段轉(zhuǎn)換邊界Fig.4 The lowest conversion speed boundary
圖5給出了在轉(zhuǎn)換過程中旋翼產(chǎn)生的拉力和鴨翼、尾翼產(chǎn)生的升力隨速度的變化曲線。由試驗結(jié)果可以發(fā)現(xiàn),在整個轉(zhuǎn)換過程中,飛機升力的主要承擔者逐漸從旋翼系統(tǒng)轉(zhuǎn)化到鴨翼和尾翼上,這也是過渡轉(zhuǎn)換的最終目的。
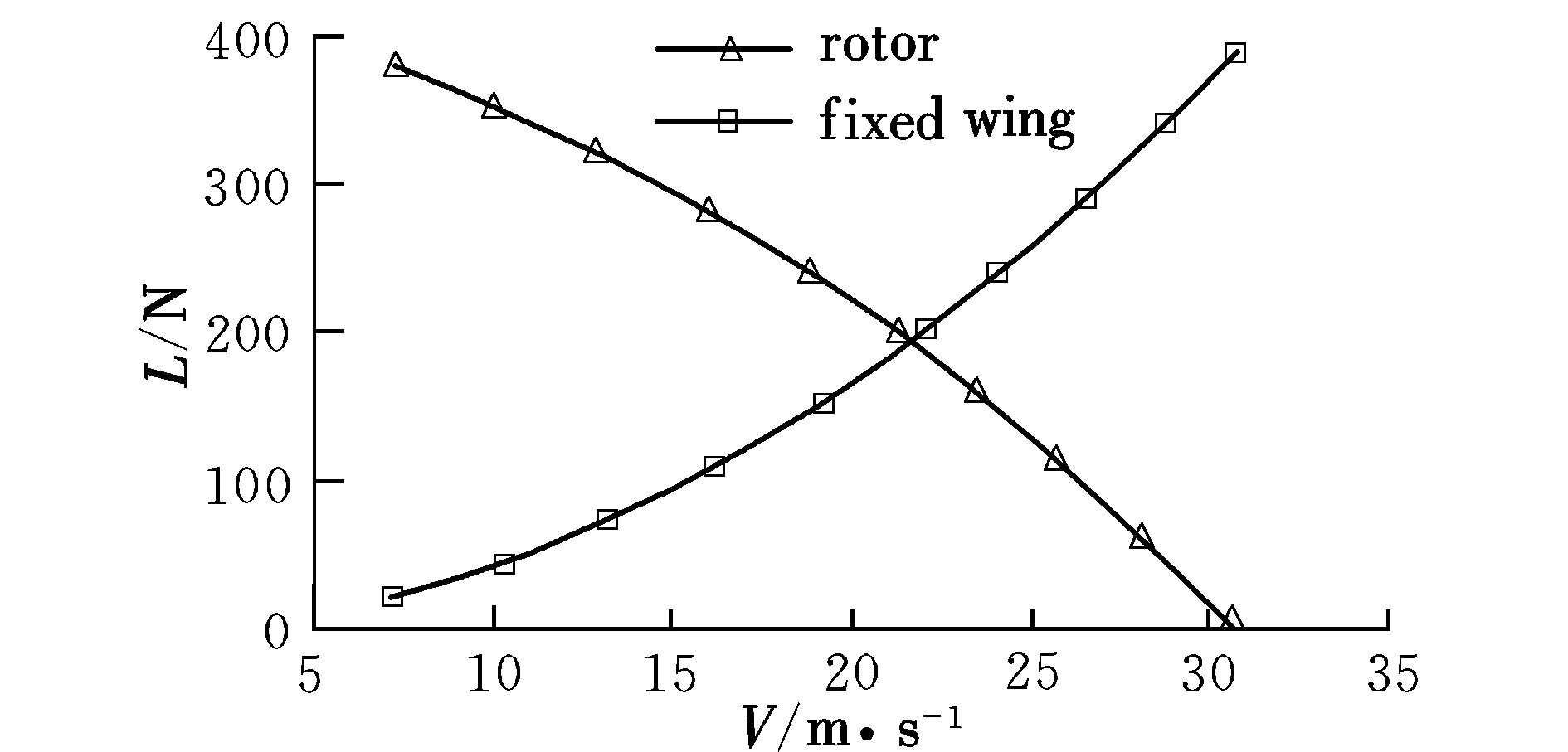
圖5 低速段旋翼和鴨翼、尾翼的升力變化Fig.5 Changes of lift on rotor, canard and horizon tail in the lowest conversion speed boundary
圖6列舉了總距分別為1°,3°,5°,7°的情況下,飛機的需用功率隨前飛速度的變化規(guī)律。由圖可知,飛機的需用功率隨前飛速度的增加而增大。將其與飛機額定功率Pe進行比較,通過飛機額定功率的限制來確定飛機的最高轉(zhuǎn)換速度邊界。

圖6 不同總距下飛機的需用功率Fig.6 Power of aircraft required by different collective pitches
圖7給出了飛機轉(zhuǎn)換過程的最高轉(zhuǎn)換速度邊界。由圖可見,飛機轉(zhuǎn)換后的最大飛行速度為65 m/s。

圖7 高速段轉(zhuǎn)換邊界Fig.7 The highest conversion speed boundary
最后將低速邊界與高速邊界結(jié)合起來,同時考慮總距的變換范圍,確定出了旋轉(zhuǎn)機翼飛機在整個過渡過程中的轉(zhuǎn)換邊界,如圖8所示。飛機只有在該邊界范圍內(nèi)進行過渡轉(zhuǎn)換才能保持水平飛行。
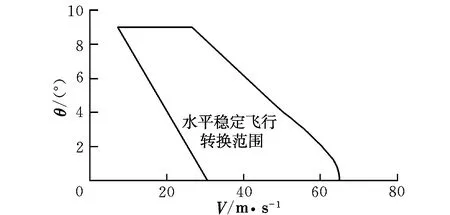
圖8 過渡段轉(zhuǎn)換邊界Fig.8 Transition boundary
4 結(jié)束語
鴨式旋轉(zhuǎn)機翼飛機作為一種可垂直起降的高速飛行器,具有良好的應(yīng)用前景。其過渡飛行模式無疑成為首先要研究攻克的難點。飛機在過渡過程中必須保持飛機縱向的力與力矩平衡。通過分析可知,機翼可用最大升力系數(shù)是飛機最低轉(zhuǎn)換速度的限制因素,發(fā)動機功率為飛機高速段的限制因素。并以此提出了一種有效的分析方法,確定出了旋翼總距隨速度的變化曲線,最終得到飛機在旋翼卸載過渡過程的轉(zhuǎn)換邊界,為后續(xù)該種飛機轉(zhuǎn)換速度的指標制定與轉(zhuǎn)換操縱提供了理論依據(jù)。此外,本文只是在定總距的前提下對飛機過渡飛行模式進行穩(wěn)態(tài)分析,下一步工作還將研究在卸載過程中總距降低的快慢對飛機過渡的影響。
參考文獻:
[1] 鄧陽平.新概念旋轉(zhuǎn)機翼飛機旋翼技術(shù)研究[D].西安:西北工業(yè)大學(xué),2006.
[2] 曹蕓蕓,陳仁良.傾轉(zhuǎn)旋翼飛行器發(fā)動機短艙傾轉(zhuǎn)角度-速度包線分析[J].航空動力學(xué)報,2011,26(10):2174-2180.
[3] 梁琨,鄧陽平,高正紅.旋轉(zhuǎn)機翼飛機旋翼飛行動力學(xué)模型及配平[J].飛行力學(xué),2011,29(5):5-8.
[4] 約翰遜W.直升機理論[M].北京:航空工業(yè)出版社,1991:35-45.
[5] 王適存.直升機空氣動力學(xué)[M].南京:航空專業(yè)教材編寫組,1985:24-46.
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機設(shè)計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33