人造蜜蜂嗡嗡飛
2013-04-29 00:44:03李和昌
科學大眾(中學) 2013年8期
關鍵詞:研究
李和昌
十年磨一劍
2013年5月,研制10年的機器蜜蜂首次實現了遙控飛行。未來機器蜜蜂可應用于搜索、營救、監測和環境監控等,甚至還能像真實的蜜蜂一樣對農作物進行授粉呢。
自2003年,美國哈佛大學就開始研制設計機器蜜蜂。2007年首次研制成了實物大小的機器蒼蠅。而要達成蜜蜂的自治飛行,需要更緊湊的高效能源,以及能無縫整合到機器蜜蜂體內的電子部件。機器蜜蜂設計受益于飛行生物學的靈感,它具有極薄的翅膀和壓電致動器制造的飛行“肌肉”,當應用一個電場時陶瓷條可以膨脹和收縮。每個翅膀都安裝在細長碳纖維體頂部,像真實的昆蟲一樣,它們的翅膀能夠獨立活動,拍打時自由旋轉。
機器蜜蜂重約80毫克,具有一對類似蒼蠅的翅膀,每秒可拍打120次,是飛行昆蟲的首個實用模型。在測試中通過一根連線與機器蜜蜂連接,控制它的起飛、空中盤旋和改變方向。拍打翅膀形成的向下氣流可使機器蜜蜂在空中盤旋,通過傾斜身體而實現向前或向后飛行。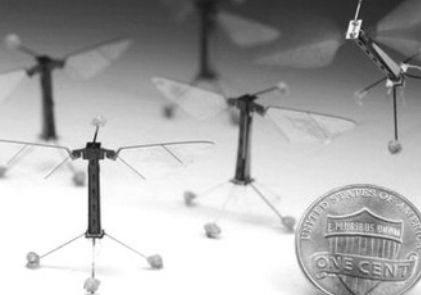
機器如何飛
但是設計最初,存在的一個重大問題是如何為翅膀提供動力,體型較大的機器人采用電磁發動機,體型較小的則需要考慮其他方案。過去幾十年,人們對小型機器人的研究十分有限,因為機器蜜蜂很小,在這樣的尺度下,占主導的是摩擦等表面作用力,而不是與質量相關的重力和慣性。由于體型的限制,傳統工具都無法使用,包括旋轉軸承、齒輪和電磁發動機組件——這些在大型機器人中隨處可見的組件,在機器蜜蜂身上效率太低。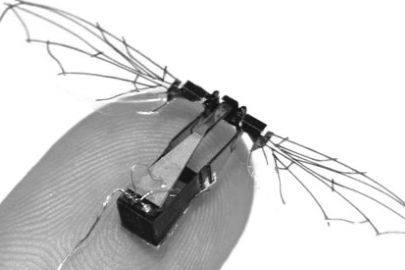
除了快速旋轉的發動機和齒輪,研究人員還模仿飛行類昆蟲,為機器蜜蜂設計了一個飛行結構——由人造肌肉提供動力,使翅膀可以拍動。機器蜜蜂的肌肉系統用獨立的“肌肉”來提供動力,控制飛行。較大功率的驅動器用來驅動翅膀拍動,而較小功率的驅動器用來微調翅膀運動,產生轉矩,控制和操縱飛行。這兩個驅動器都設在翅膀與身體的連接處。
人造肌肉由壓電材料構成,當向壓電材料施加電壓時,壓電材料就會收縮。雖然這樣的驅動器還存在諸如易碎、需要較高的電壓等一些缺點,但從物理上來說,尺寸較小對研究人員也有好處。驅動器越小,運動速度越快。由于驅動器在每個運動周期完成的做功量是恒定的,所以翅膀拍打得越快,輸出的功率就越大。事實上,人造肌肉的功率,與同體積的昆蟲肌肉相當。
關節很重要
過去幾年,研究人員已經試用了數十種不同的驅動器和關節。他們的目的是想找到一種最簡單可行的制作方案,因為要制造成千上萬的機器蜜蜂,驅動器和關節這樣的組件必須大規模生產。
目前,研究人員用一種硬質材料如碳纖維層作為頂層和底層,類似一個三層的三明治結構,中間夾著柔軟的聚合物,以此構建每個機器蜜蜂。碳纖維層中間的聚合物是可以彎曲的,這樣就可以制備出—個柔性關節。這種方法的美妙之處在于,適合高效的流水線生產。首先,研究人員用紫外線激光精確地切割碳纖維層;接著,將各層對齊,用黏合劑壓在一起;然后,從基板中取出每個組件;最后,他們從兒童立體書中得到靈感,設計出最后一步:只用—個動作,就可以在二維表面彈出3D結構。
供能受限制
研究人員在建造蜜蜂大小的機器人方面已經取得了很大的進展,但仍然存在懸而未決的問題,怎樣為這么小的機器人供能。為了供能問題,機器蜜蜂的身體大部分都得由主驅動器和動力裝置占據。想想電池吧,盡管研究人員也在研制固體氧化物微型燃料電池。供能也是一個兩難的問題:供能元件越大,提供的能量當然也越多,但這樣一來,機器蜜蜂的重量就會增加,需要更大的推進系統來抵消增加的重量,最后又得尋找更大的供能元件。
在飛行狀態下機器蜜蜂使用19毫瓦電流,相當于多數昆蟲的能量消耗。考慮到電池的能量密度和身體各部件的能量利用率,研究人員最樂觀的估計是,這只機器蜜蜂只能飛行幾十秒鐘。為了延長飛行時間,研究人員盡量減小蜜蜂的重量,并使各部件的效率最大化。
雖然研究人員還未制造出可以自己供能飛行的機器蜜蜂,但已經可以讓一只100毫克的機器蜜蜂,產生足夠的推力起飛。他們把它系在一個外接電源上。借助主動和被動機構,這只機器蜜蜂可以自己保持穩定。
學習大自然
電源不是唯一的問題。機器蜜蜂的“大腦”是另一個難題。在野外,機器蜜蜂必須不斷根據環境,確定最好的行動方式,并自己控制飛行機制。實驗室里,研究人員還可以借助外部電子設備,制定一個臨時的解決方案,但真正進入工作狀態,機器蜜蜂只能依靠自己的“大腦”。
如果要達到較高的水平,機器蜜蜂的“大腦”不僅需要自身的行動,還得與其他機器蜜蜂互動。研究人員打算給機器蜜蜂設計一個多層次的“大腦”:傳感器負責感知環境因素,電子神經系統負責基本的控制功能,而一個可編程的電子大腦皮層負責做出高層次的決策。作為第一步,首先要設計一個簡要版的大腦系統,讓機器蜜蜂實現自主飛行。這也是一個挑戰,需要嚴格控制由傳感器、信號處理器和身體各部位組成的回路。
為了弄清楚該使用什么樣的傳感器,以及如何構建大腦的電路結構,研究人員再次將目光投向了大自然。蜜蜂感知世界時,使用了兩類傳感器:本體感受器會讓蜜蜂知道自己飛行時身體處于何種狀態——翅膀的拍打速度、身體的體能狀況;外部傳感器則提供外部世界的信息。
現代技術提供了GPS、加速計和多軸陀螺儀,但這些傳感器要么太重,要么會能耗太多,或者又重又耗能,根本沒法用在機器蜜蜂上。因此,研究人員正在研究一種電子視覺系統,與天然蜜蜂的視覺系統類似,可以分析“光流”,也就是在一個視覺傳感器的“視野”中,明顯的物體運動。想象一下,當你乘坐汽車時,看到的窗外景物是怎樣的:車窗附近的物體移動速度快,而遠處的物體移動緩慢。如果一個視覺系統可以做到這一點,它就能展現某一環境的詳細三維場景。即使它只配備有一個小小的、簡單的圖像傳感器。
問題難取舍
研究人員面臨的一個重要問題是怎么取舍。例如,他們希望有一個高分辨率的攝像頭,但高像素意味著更大的圖像傳感器,而且需要額外的計算能力來處理圖像。那么,如何取舍才是最合適的?
為了回答這類問題,研究人員已經開發出一種特殊的風洞實驗室。他們把機器蜜蜂的身體,安裝在一個固定的多軸向力和扭矩傳感器上,讓它扇動翅膀,模擬飛行;將蜜蜂飛經的物理環境的圖像,投影在風洞實驗室的墻壁上。通過這種方式,可以探索視覺系統、大腦和身體如何協調合作,從而更好地控制機器蜜蜂的飛行。
另外,機器蜜蜂的大腦還得有足夠的能力,處理圖像傳感器傳來的數據流,做出適當的決策,驅動身體里的驅動器。同樣,那些現成的先進設備還是沒法用于機器蜜蜂。因此,研究人員一直在開發一類新的計算機架構,用于構建機器蜜蜂的大腦,把通用計算與專用硬件加速器結合起來。與普通家用電腦中可以做任何事情的通用處理器不同,硬件加速器這種經過精細設計的電路模塊只能做一件事情,但可以做得很好。這樣,即便在嚴格的功耗限制之下,也可以使用硬件加速器來快速并實時地進行穩定飛行所需要的計算。
前途無極限
當然,飛行控制僅僅是個開始。同時,還要開發其他一些傳感器,讓機器蜜蜂完成某些特殊任務,比如去搜尋埋在地震廢墟中的幸存者。事實上,小巧靈活、簡單價廉的機器人,能比一些專業人員更有效地完成任務。例如,營救人員可以帶上一個重量不足1千克、裝有1 000只機器蜜蜂的盒子,在遭受自然災害的野外,放飛這些機器蜜蜂,根據傷者的熱量、聲音、呼出的二氧化碳來搜尋、營救傷者。如果只有3只機器蜜蜂完成任務,其他蜜蜂都失敗了,對于整個蜂群來說,仍然是取得了成功。
雖然研究人員已經取得了很大的進步,但要做的工作還有許多。他們預計,幾年之內,機器蜜蜂將能在嚴格控制的實驗條件下飛行。10年以后,它們將被廣泛使用。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
