一種車載靜態稱重系統設計*
2013-04-21 01:55:30張從力史記征陳增江
傳感器與微系統 2013年1期
張從力,史記征,陳增江
(1.重慶大學 自動化學院,重慶400030;2.重慶長安跨越車輛有限公司,重慶 萬州404040)
0 引 言
隨著我國經濟的不斷發展,貨物運輸產業也在不斷擴大,然而,測量貨車實際載重量一直是困擾貨車司機和供貨商的一大難題。雖然可以通過地磅稱量貨車貨物的重量,然而對于去農村或山區收購農產品的大型貨車來說,這無疑是不可能實現的。本文基于此種考慮,設計了一種車載靜態稱重系統。在貨車上安裝車載靜態稱重系統之后,無論是集裝箱貨物還是散裝貨物,不用過磅,其重量可通過車載稱重系統立刻顯示在顯示屏上,并可根據需要,隨時打印出稱量的結果。
1 靜態貨車車載稱重系統的設計原理
靜態貨車車身自帶稱重系統主要有數據處理單元、稱重傳感器、傾角傳感器以及其他外圍器件組成[1]。數據處理單元采用AT89C52 單片機芯片,安裝在駕駛室內,是整個稱重系統的核心;稱重傳感器和傾角傳感器安裝在車廂與底盤之間。當車輛靜止時,由傳感器采集4 路載重信息,經單片機處理后存儲車輛載重信息并將其顯示在液晶顯示屏上,然后移動車輛多次,數據處理單元將顯示和存儲每次的稱重結果,并求其平均值作為最終車載貨物的重量。移動車輛進行多次測量的目的是為了盡量減少各種干擾對測量精度的影響。
2 系統硬件設計
稱重系統的原理框圖如圖1 所示[2]。

圖1 稱重系統原理圖Fig 1 Principle diagram of weighing system
傾角傳感器用來測量貨車相對于水平地面的傾斜角,其安裝目的是為了減少地面不平整對測量結果的影響;4 只壓力傳感器用來采集貨物的重量信息;顯示屏用來顯示測量結果;指示燈用來顯示車輛是否過載;按鍵是用來確定貨物的測量次數,即貨車移動次數,按鍵一旦按下,其值將被保存,以便最后求平均值,默認情況下測量一次;擴展接口是用來接打印機等外部設備。
2.1 傳感器的選擇
傾角傳感器采用普通傳感器即可滿足要求,其安裝目的是為了盡量消除地面不平整對測量精度造成的影響。稱重傳感器采用壓力傳感器,壓力傳感器主要有整體多柱式、低型面平臺式、低型面彎曲梁式、單懸臂式、雙懸臂式和S型拉壓式等。
在以上各種壓力傳感器中,通過對比它們的特點,結合本系統的要求,選用雙懸臂式傳感器。因為雙懸臂式傳感器抗壓力能力強、承重能力大、抗側向沖擊能力強,并且易于安裝[3,4]。
2.2 傳感器的安裝位置
本方案中,在車輛底盤的周圍安裝4 只壓力傳感器。傳感器的安裝位置與方法如圖2 所示。

圖2 傳感器安裝位置示意圖Fig 2 Sketch map of sensor installation position
2.3 信號處理電路設計
2.3.1 信號的采集
當車廂裝有貨物時,壓力傳感器會發生形變,從而導致傳感器輸出電壓的變化,系統通過檢測傳感器輸出電壓的變化可以間接地測量出車廂內貨物的重量。由于傳感器的機械變形量很小,所以,傳感器輸出電壓的變化量ΔU 非常小,在進行A/D 轉換之前,ΔU 需要經過高精度的放大電路進行放大,然后進入微處理器進行處理。信號放大功能由放大器AD620 完成[5]。電路連接圖如圖3 所示。
2.3.2 信號的處理
經AD620 放大后的電信號為1~5 V 的標準信號,但仍為模擬信號,單片機的CPU 不能直接對這些信號進行處理。需要對其進行整形、濾波,然后經ADC0809 進行A/D轉換。ADC0809 是CMOS 單片型8 位逐次逼近式 A/D 模數轉換器,其內部有一個8 通道多路開關,它可以根據地址碼鎖存譯碼后的信號,轉換時間為130 μs,滿足系統要求。控制器采用AT89C52 單片機,它的工作電壓較低、性能優良,片內含有通用的8 位中央處理器、256B 的隨機存取數據存儲器和8 kB 可反復擦寫的Flash 只讀程序存儲器,兼容標準 MCS-51 指令系統[6]。

圖3 信號放大電路圖Fig 3 Circuit diagram of signal amplification
單片機對ADC0809 的輸出信號進行處理,處理后的結果就是車廂內貨物的重量,同時,將處理結果在液晶屏上進行顯示。本系統中用YLF12232F 作為顯示屏,YLF12232F 液晶屏內置有 8192 個 16 ×16 點漢字庫和128 個16 ×8 點 ASCII 字符集圖形點陣,它主要由行、列驅動器和128 ×32 全點陣液晶顯示器組成。可實現圖形、漢字的顯示,與控制器接口既可以采用并行連接,也可以采用串行連接。ADC0809,YLF12232F 與控制器的連接電路圖如圖4 所示。
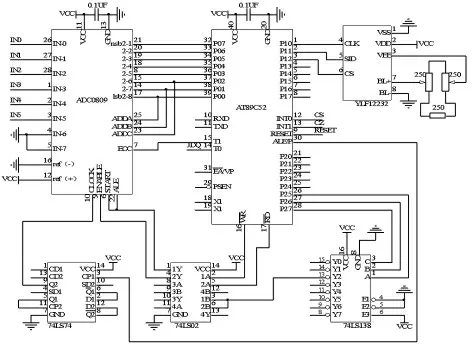
圖4 系統總電路圖Fig 4 Overall circuit diagram of system
3 系統軟件設計
軟件部分主要完成傾斜角度計算、數據采集、數據處理和稱量結果顯示等功能。程序用面向工程的C51 語言編寫。
4 系統實驗與結果分析
實驗對象是重慶長安跨越車輛有限公司生產的SC1022BB13D1.0MT FA 輕型貨車,其額定載重量為1.3 tf。采用100,50,10 kgf/袋沙子為載重單位,對設計方案進行測試。實驗結果如表1 所示。

圖5 數據處理程序流程圖Fig 5 Flow chart of data processing program
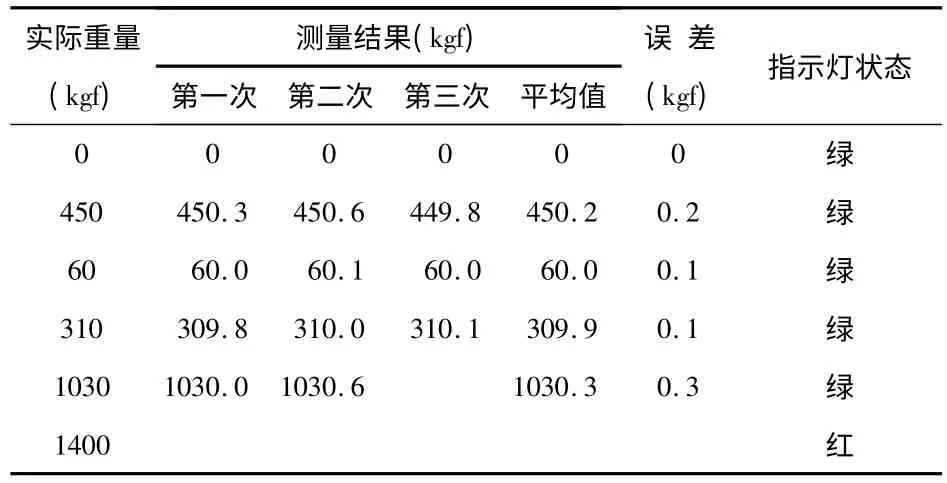
表1 部分實驗結果Tab 1 Partial experimental results
從表中可以看出:誤差一直保持在0.5kgf以內,說明系統基本上能滿足貨車車載稱重系統的要求。如果所需測量結果的精度要求較高,可以多次移動車輛,控制系統將顯示并保存每次的測量結果,并將其平均值計算出來并顯示。
5 結束語
本文從實際需要出發,設計了一種車載靜態稱重裝置,該系統可以安裝在各種不同類型的載貨汽車上,并可根據車型的最大載重量不同選擇不同的傳感器型號,使貨車在沒有地磅的情況下可以隨時隨地測量其載貨量,同時也避免了多次測量貨物重量再裝車所造成的誤差。本文所設計的系統中,當貨車超載時,指示燈將變成紅色,但也可以根據實際需要,對系統的軟硬件進行改進,當貨車超載時,可以限制車輛的啟動。
[1] 林 穎,李文舉,常永貴,等.基于ARM 的車載稱重系統[J].儀表技術與傳感器,2008(3):28 -30.
[2] 李正軍.一種汽車載體自動稱重裝置的研究[J].電子測量與儀器學報,2009(8):95 -98.
[3] 冉文東.車用傳感器組件及解決方案[J].中國高新技術企業,2009(6):23 -24.
[4] 郁有文,常 健,程繼紅.傳感器原理及工程應用[M].西安:西安電子科技大學出版社,2003.
[5] 余祖俊.微機檢測與控制應用系統設計[M].北京:北京交通大學出版社,2001.
[6] 胡漢才.單片機原理及其接口技術[M].2 版.北京:清華大學出版社,2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
