水下測試基陣機械掃描裝置的設計
2013-04-13 09:30:12薛璞湯斌
計測技術 2013年2期
薛璞,湯斌
(中航工業北京長城計量測試技術研究所,北京100095)
0 引言
中航工業北京長城計量測試技術研究所自主研制了多種水下測試基陣機械掃描裝置,它能攜帶水下聲強傳感器實現長距離環形掃描,并實現了全自動化位置反饋控制。該裝置為計量測試系統中非標計量裝置的機械輔助設備設計,已應用于某高校水下艙段測試試驗;該裝置能夠最大限度的減少計量實驗過程中的誤差,提高計量檢定過程的工作效率。
這種機械設計方案可以有很多變化。本文基于本課題的實際應用情況,對其環形基陣架進行有限元分析,通過有限元分析的結果并結合實際現場工況的需要,確定最優的設計方案。
1 機械功能指標及電控系統方案
1.1 功能要求
水下測試基陣機械掃描裝置包括基陣架、掃描控制系統和掃描控制計算機,該裝置主要用于對指定水下艙段測試試驗模型進行環形掃描,由計算機控制,使掃描控制系統帶動基陣架和聲強探頭運動,完成艙段試驗模型柱面和平面的聲強測量,為相關的測量任務提供機械輔助[1]。其主要性能指標如下:基陣架由接頭和連接桿構成,形狀為環形;直徑約2.6 m;基陣架聲散射強度小于等于-20 dB;聲強探頭固定支架在圓環基陣架上固定位置的相對偏差小于等于1 mm。
1.2 控制系統設計
如圖1所示,控制系統主要由四部分組成:現場操作臺、控制計算機、電機控制系統和位置反饋系統。現場操作臺包括位移控制按鍵、LED 位移數碼顯示器、CAN 總線接口和電機運動控制器等。兩個拖動電機的控制是根據編碼器的反饋信號進行定位控制。
顯示電路實時將各位移編碼器的位移讀數顯示在LED 顯示器上。位移電機控制電路根據編碼器的讀數對位移電機進行控制,使被控對象保持在要求的位置。CAN 總線或無線接口為遠程控制提供了可靠的數據接口,操作人員可以在計算機上讀取當前位移數據,并通過相應指令對平臺和溫度探頭的位移進行控制。
限位保護的功能是避免因位移部件的運動范圍超出系統設計允許值而使整個系統的機械或電器發生損壞。
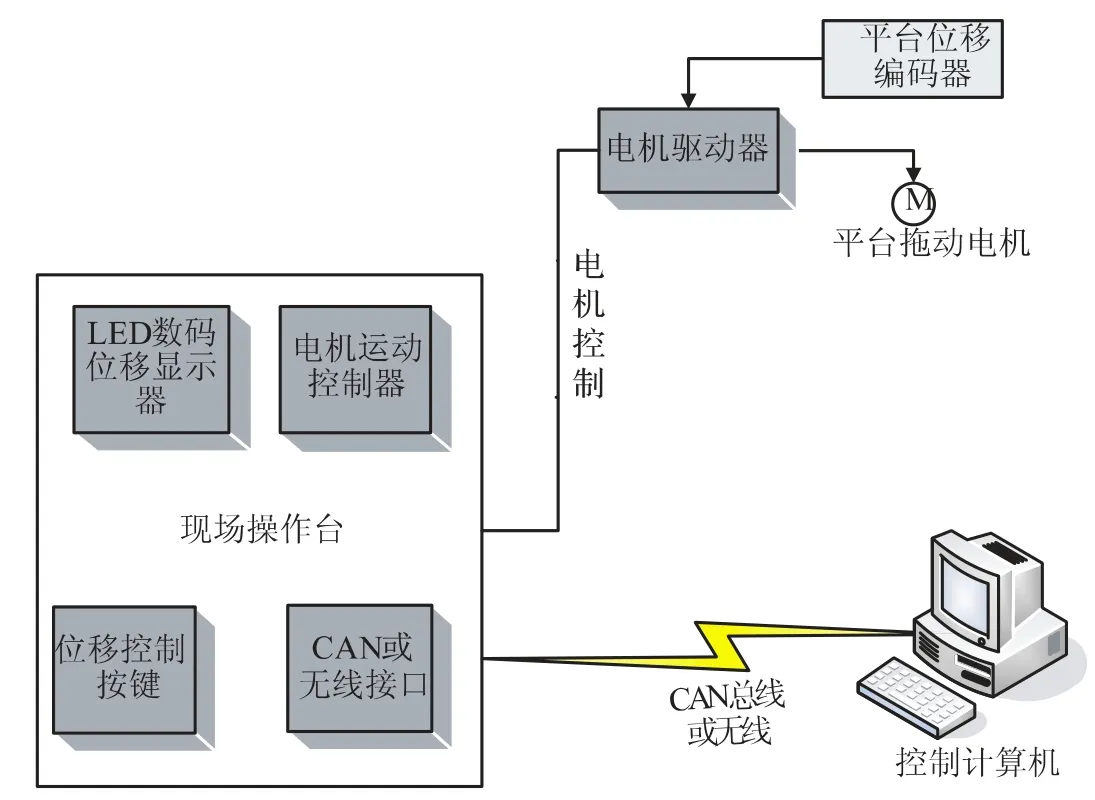
圖1 控制系統結構圖
此裝置進行二級限位保護。限位控制信號是第一級限位保護,控制信號會對運動控制器中的微處理器產生中斷,從而使裝置不能在規定方向上運動,但可進行其他方向的運動,從而脫離限位保護狀態。限位控制開關是第二級限位保護,如果控制電路損壞而導致電機失去控制就利用此限位開關進行限位保護,如果位移部件的運動范圍超出機械運動系統允許值,此時限位控制開關就會切斷電機的電源,從而避免設備的損壞[2]。
2 機械系統總體設計
2.1 基陣架機械結構整體設計
基陣架機械結構主體如圖2所示,位移機構采用圓導向光軸與直線軸承的導向方式,采用齒輪齒條傳動方式。
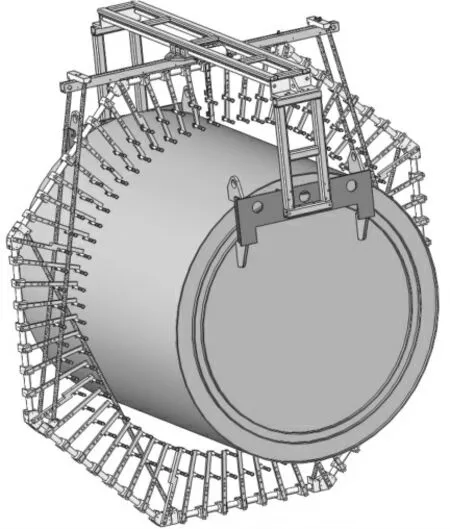
圖2 基陣架機械結構整體設計
掃描架沿X 方向掃描范圍:艙段行程2300 mm。
基陣架主體結構采用了碳纖維材料連接合金鋁件的方式,重量輕,強度高,同時可大大減小在水中對模型輻射聲場的影響。環形掃描架由8 根直徑40 mm的空心碳纖維桿和若干聯接接頭組成,碳纖維桿以45°圓弧為等分角依次連接,連接處安裝傳感器,此外每一根碳纖維桿上再安裝7 對傳感器,安裝完畢后,128個傳感器呈內徑2600 mm 內接圓。傳感器與艙段表面距離300 mm。
2.2 碳纖維桿的連接
八根碳纖維桿的連接采用定位銷加螺紋擰緊方式連接固定,如圖3所示,考慮到接頭強度直接影響最終掃描環的精度,接頭采用強度較高的鋁合金,不采用非金屬材料。
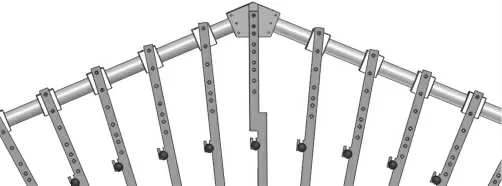
圖3 碳纖維桿的連接
3 基陣架水下測量有限元分析
在設計過程中,由于整個圓環掃描架自身加上傳感器及其電纜后的重量比較大,在水中還有一定的阻力,安裝后會由于重力不能保證整個掃描架呈圓形掃描狀態,從而影響水下測量的準確度。
為保證水下測量準確度,設計中對基陣架主體進行了有限元分析,如圖4所示,考慮到基陣架變形較大,左右兩側分別加上兩根直徑為16 mm 的碳纖維桿進行拉拽,變形有限元分析如圖5所示。
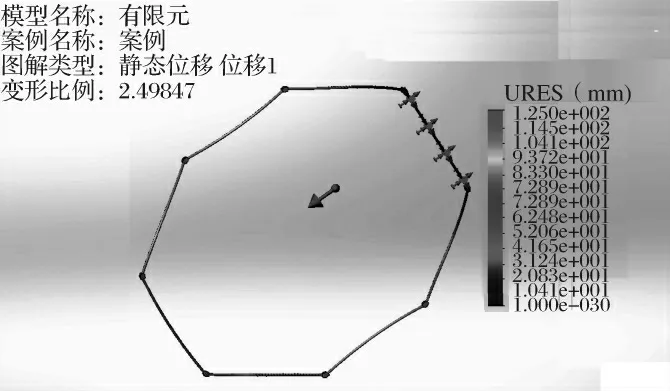
圖4 基陣架主體有限元分析
由圖中可以看出,沒有帶拉桿的基陣架圓環最大變形120 mm,兩側帶拉桿的基陣架圓環最大變形46 mm,此外,變形最大點均在底端橫桿處。在底端再加兩根拉桿,進行有限元分析,如圖6所示,此時基陣架圓環最大變形為6.7 mm。
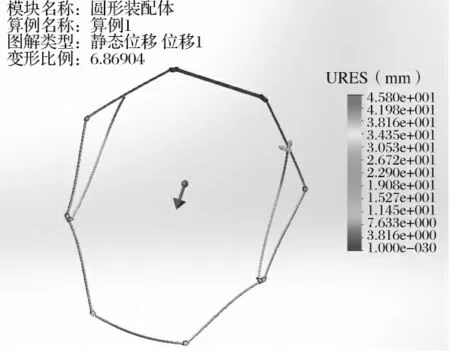
圖5 兩側帶拉桿基陣架有限元分析
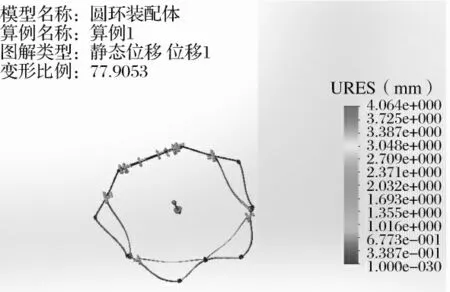
圖6 帶四根拉桿的基陣架有限元分析
從表1 有限元分析結果可以看出,當基陣架帶四根拉桿的情況下能夠滿足整個水下測量誤差達到最小,但同時最大變形位置出現在底端桿部連接處,說明整個圓環的圓度變形量可以控制在測量要求范圍內,但在設計中要注意碳纖維桿連接處的強度。在設計過程中,使用了鋁合金作為碳纖維桿連接件的加工,所以能夠保證其強度。
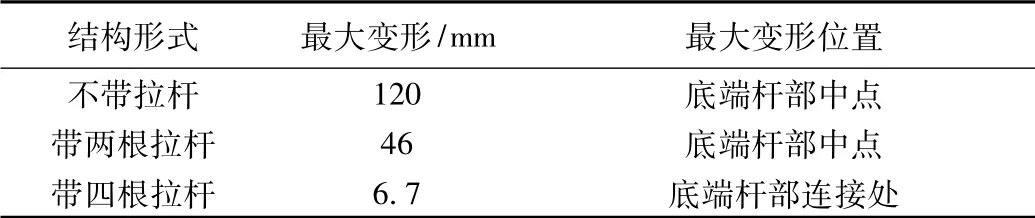
表1 有限元分析結果
4 定位誤差
4.1 理論位移定位誤差計算
基陣架位移機構采用圓導向光軸與直線軸承的導向方式,整個裝置的傳動系統采用齒輪齒條傳動方式。基陣架位移機構位移控制誤差計算如下[1]:
1)電機控制誤差:驅動電機選用了帶諧波齒輪減速機和編碼器反饋的步進電機,自帶13∶1 行星齒輪減速機,輸入電壓單項220 V,由所選電機手冊查得電機編碼器最大細分數為2000 脈沖/r,可以得到


2)齒條加工精度:根據直線導軌技術要求,查機械設計手冊,齒條加工誤差為0.2 mm;
3)齒輪齒條嚙合齒隙由安裝誤差確定,若齒輪齒條嚙合誤差按0.1 mm 計算;
由公式“位移機構理論誤差=電機控制誤差+齒條加工誤差+齒輪齒條嚙合誤差”計算得出此位移機構理論誤差為0.0029 +0.2 +0.1=0.3029(mm),滿足定位誤差要求。
4.2 實驗結果
水下聲學計量檢測過程是在整個圓環基陣架沿艙段軸向方向的行程范圍內,分別以相同位置間隔進行實地多次檢測,對于檢測結果分別取各點數據中的誤差最大值,并對誤差取平均值。而整個實驗過程分別采用不帶拉桿、帶兩根拉桿和帶四根拉桿三種機械連接方式,表2 為實際應用過程中三種不同結構所產生的位移定位誤差和實際變形。
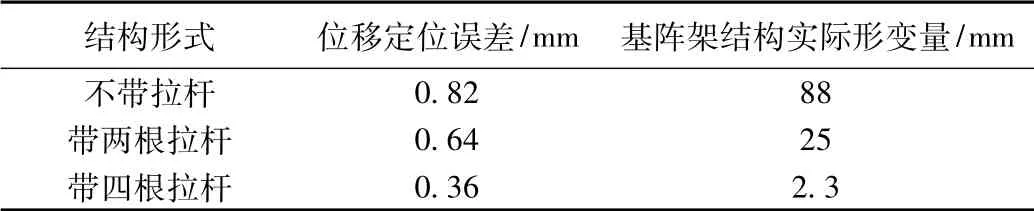
表2 實際應用過程中三種不同結構所產生的位移定位誤差和實際變形
從實際檢測結果看出,定位誤差均能滿足使用要求,帶四根拉桿的結構形變量能夠滿足要求。
5 小結
本文詳細介紹了水下測試基陣機械掃描裝置中環形基陣架的受力情況,并在實際應用中對幾種結構方案進行比對分析,從而最終確定對測量誤差影響最小的一組方案,在計量輔助機械設備的研制過程中,這些機械結構的受力變形都會對實際計量過程產生影響,因此提高機械結構的性能對計量實驗的準確性有深遠的影響。
[1]湯斌,王文健,王華.兩種升降回轉定位裝置的設計[J].計測技術,2012,32(3):30-32.
[2]李國文,牟娟,孫千軍.五自由度位移平臺控制系統設計[J].計測技術,2012,32(2):29-32.
[3]湯斌.高水壓環境下機械位移機構設計[J].計測技術,2012,32(2):26-28,32.
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
上海建材(2019年4期)2019-05-21 03:13:02
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
纖維復合材料(2018年4期)2018-04-28 08:45:28
纖維復合材料(2018年3期)2018-04-25 07:22:58
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國塑料(2016年6期)2016-06-27 06:34:16
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24