滑模觀測器在直流變頻洗衣機中的應用
2013-04-01 01:10:24葛豐亮季鈞
家電科技 2013年7期
葛豐亮 季鈞
(中國家用電器研究院 北京 100176)
1 引言
洗衣機已成為日常生活中必不可少的家用電器。目前市場上以波輪洗衣機和滾筒洗衣機為主,而滾筒洗衣機以其節水、節電、噪音小、高溫殺菌、外觀時尚、對衣物磨損小等特點在洗衣機產品結構中占據主流地位 。
隨著電力電子、電機制造及控制技術的提高,直流變頻已成為洗衣機的核心技術之一,直流變頻洗衣機成為各大品牌廠家主推的產品。直流變頻洗衣機具有三大特點 :(1)洗衣效果好,采用變頻控制,可實現無極調速,可根據洗滌物的種類、數量、臟污程都,確定不同的洗滌脫水速度,使衣物的洗凈率和磨損率達到最佳效果。(2)節能,普通的洗衣機電機及傳動系統的效率僅為40%-50%,而直流變頻洗衣機的效率可達70以上。(3)噪音低、振動小。
直流變頻洗衣機高效、節能、噪音振動低的關鍵在于高效的電機驅動系統。永磁同步電動機以其高密度、高轉矩/慣量比、高效率、調速范圍寬等特點成為直流變頻洗衣機電機的首選。為了獲得高性能的驅動控制,必須準確得到電機的轉子位置,這通常需要在電機轉子軸上安裝一些位置傳感器,如旋轉變壓器、光電編碼器等。但是,這些會增加控制成本,降低系統的可靠性等。
為了降低洗衣機控制器硬件成本和提高控制性能,開展永磁同步電動機無位置傳感器研究具有重要意義。目前,永磁同步電動機無位置傳感器控制的實現方案有多種,如卡爾曼濾波、磁鏈估計法、高頻注入法 等,其中卡爾曼濾波計算量大,觀測結果易受電機參數影響;高頻注入法對電機的凸極性有一定要求,并且只適用于低速運行。滑模觀測器則對系數參數變化、外界環境擾動等具有完全的自適應性,對數學系統的模型要求不高,具有很強的魯棒性。
本文首先給出永磁同步電動機在靜止坐標系上動態模型,然后設計分析一個滑模觀測器來估計角度與速度。仿真分析證明了該觀測器的有效性與可行性。
2 永磁同步電動機數學模型
忽略定子鐵芯飽和、不計磁滯與渦流,永磁同步電動機包含三個平衡的定子繞組,在空間上相差120度,三相電壓方程為:
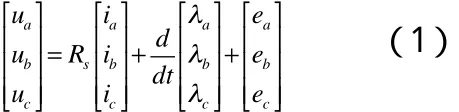
其中,R 為相電阻,i、i、i 為定子相電流,e、e、e 為相反電動勢,λ、λ、λ為相磁鏈。磁
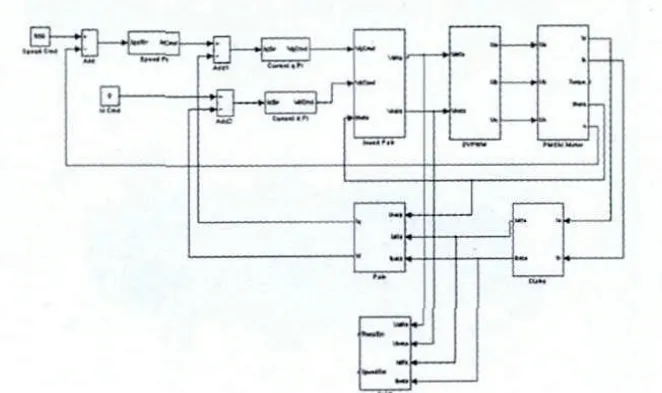
圖1 永磁同步電動機滑模觀測器驗證系統
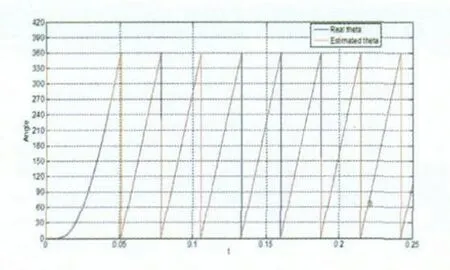
圖2 轉子實際位置角與估計位置角
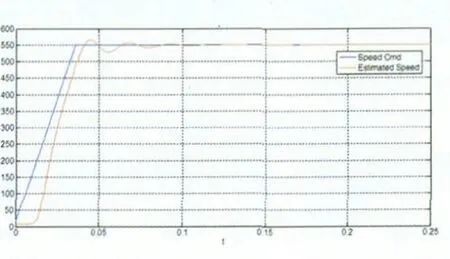
圖3 550rpm轉子實際速度與估計速度
鏈與反電動勢可以表示為:
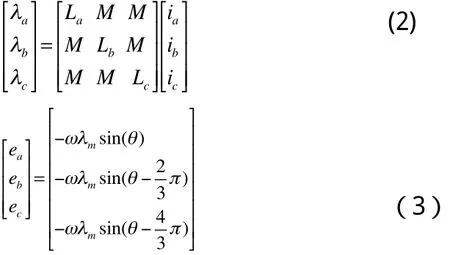
其中,L、L、L為每相自感,M為互感,ω為轉子角速度,θ為轉子磁極與a相的夾角,λ為永磁磁鏈。
另外,電機三相平衡,則三相電流、電感滿足下式:

將式(2)、(3)和(4)帶入式(1)并簡化得到:
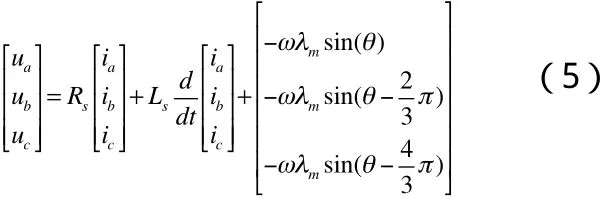
其中,Ls為同步電感,其值為(L-M)。
將三相電機方程轉換到靜止坐標系αβ軸上,則在αβ軸上動態方程可以表示為:

其中


3 滑模觀測器的設計與仿真
滑模觀測器實質是構造一個觀測器來估算電流,并與實際電流作比較,通過選擇合適的參數,得到αβ軸的反電動勢,從而得到轉子位置角。根據文獻 ,構造如下滑模觀測器:

根據滑模變結構理論 ,選擇合適的滑模增益,可使系統穩定。經過推導后,估算的反電動勢為:

其中,f為考慮高頻噪聲而引入的低通濾波器截止頻率。
根據式(8)可計算得到估計的轉子位置角,然后對轉子位置角進行微分,可得到估計的轉子速度。則估計的轉子位置角與速度分別為:
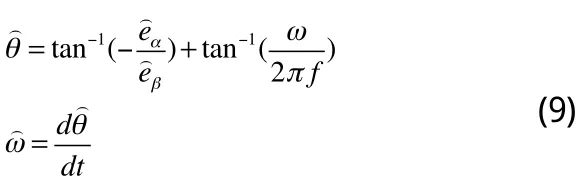
式(9)中右端第二項用于補償由低通濾波引起的相位滯后。
為了驗證滑模觀測器,在Matlab/Simulink仿真環境下進行仿真分析。Simulink是Matlab中的一種可視化仿真工具,可實現動態系統建模、仿真和分析。圖1是基于矢量控制在Simulink搭建的永磁同步電動機滑模觀測器驗證系統,包含一個速度PI調節器,兩個電流PI調節器、空間矢量調制SVPWM、電機模型PMSM motor、滑模觀測器SMO。另外,還包含經典的坐標變換模塊Clarke、Park和Park逆變換。永磁同步電動機的參數為:R =2.5ohm,L =93mH,λ=0.102Wb。圖2為550rpm轉子實際角度與估計值的仿真曲線,可以看出,估計角度與實際角度非常接近,角度差小于10度。圖3為550rpm實際轉速與估計轉速的仿真曲線,穩態速度差小于10rpm。仿真結果表明,滑模觀測器能夠有效估測電機的轉子位置與速度,滿足洗衣機控制要求。
4 結語
本文分析了一種適用于直流變頻洗衣機的無位置控制方法—滑模觀測器。通過選擇合適的滑模增益,可有效的估計轉子位置與速度。仿真結果驗證了該方法的有效性,滿足洗衣機對節能、靜音及智能化的要求。
[1] 2013年度洗衣機產業發展趨勢及前景預測.http://tech.qianlong.com/33443/2013/05/03/692 4@8665162.htm
[2] 直流變頻洗衣機的優勢http://www.xdjd.cn/Article/501613/1_2_58_71/0/0BF8 0AB2919D/Article.aspx
[3] I.Boldea, M.C. Paicu, and G.D. Andreescu.Active flux concept for motion sensorless unified ac drives. IEEE trans. Power Electron, vol.23,no.5,pp.2 612~2618,Sep.2008.
[4] 劉毅,賀益康,秦峰.基于轉子凸極跟蹤的無位置傳感器永磁同步電動機矢量控制研究[J].中國電機工程學報,2005,25(17):121~126.
[5] 鄒還演,黃蘇融,洪文成,張周云,貢俊.內置式永磁同步電機無位置傳感器控制[J].電機與控制應用,2009,36(9),17~21.
[6] 瑤瓊薈,黃繼起.變結構控制系統[M].重慶:重慶大學出版社, 1997.