電液比例位置控制系統的研究
2013-03-31 07:11:30董建園曹旭妍魏培施玉艷
機床與液壓 2013年7期
關鍵詞:系統
董建園,曹旭妍,魏培,施玉艷
(西安建筑科技大學,陜西西安710055)
隨著計算機技術和工業技術的普及,電液比例技術得到迅速發展。與電液伺服控制技術的高成本、高維護、高能耗相比,電液比例技術是一種廉價、節能、維護方便、適應大功率控制及具有一定控制精度的控制技術,因而更適用于工程機械等工業場合[1]。由于電液比例位置控制系統的變流量死區特性,線性PID控制器難于協調快速性和穩定性之間的矛盾。且目前主要是基于MATLAB/Simulink對系統進行仿真,實驗驗證較少,在實際系統的應用中差異較大。
作者以LabVIEW為軟件開發平臺,將計算機強大的計算處理能力和儀器硬件的測量、控制能力結合在一起,設計出帶死區補償的模糊控制器,并在實驗室的QCS014AT液壓試驗臺進行實驗驗證,使系統在結構、精度、動態品質等方面都具有較好的效果。
1 系統組成及數學模型
1.1 系統組成
電液比例位置控制系統的原理圖和實物圖分別如圖1和2所示。將原本由PLC控制的開環系統設計成帶位置反饋的閉環控制系統。

圖1 電液比例位置控制系統原理圖

圖2 電液比例位置控制系統試驗臺
系統采用寧波華液公司生產的型號為BFW-03-3C2-95-50的不帶內置放大器的直動式三位四通比例方向閥,相配套的比例放大器為H-AP-204-0.8雙路比例放大器。液壓缸采用摩擦較低的單活塞桿油缸,缸內徑D=40 mm,活塞桿直徑d=20 mm,油缸最大行程為30 cm。
系統采用計算機控制,當輸入給定位移后系統開始工作,此時,由KTC-200位移傳感器檢測出液壓缸活塞桿的當前位置信號,并經USB-6008數據采集卡進行A/D轉換后反饋到計算機中,與實際輸入位移對應的電壓信號進行比較,得出電壓偏差控制量;通過數據采集卡進行D/A轉換,將采集到的電壓差送給比例放大器,經線性放大后轉換成為電流,用以驅動比例方向閥并調節節流口開度,比例方向閥以一定的開口大小給被控液壓缸提供相應大小的流量來控制液壓缸運動;再由位移傳感器采回數據,根據誤差的大小來調節控制器參數,反復進行,最終使控制系統的被控量 (位移)達到期望值,實現位置控制系統精度的提高。
1.2 系統的數學模型
為了得到系統的傳遞函數,必須對閉環控制系統建立動態數學模型[2],這是閉環控制系統設計的關鍵。采用比例方向閥構成的閉環位置控制系統框圖如圖3所示。

圖3 位置控制系統基本組成框圖
圖中各個環節的傳遞函數按下面的方法求出:
(1)比例放大器。由于其轉折頻率比系統的頻寬高得多,所以可以近似稱為比例環節,用Ka表示。
(2)比例方向閥。工程上將比例方向閥視為一個二階環節。傳遞函數為:

(3)位移傳感器。其頻寬也比系統的頻寬高得多,也可以近似成比例環節,用Km表示。
(4)閥控液壓缸。電液比例位置控制系統的主要元件是比例閥和液壓缸,系統的動態特性取決于閥和液壓缸的特性并和負載有關。若忽略干擾量FL的輸入,油缸負載是慣性負載和彈性負載的組合,黏性負載很小,可以忽略。因此得液壓缸負載傳遞函數為:
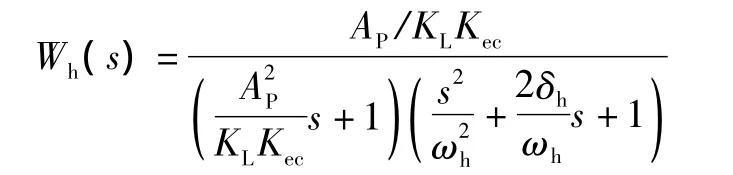
從以上分析可得到閉環位置控制系統的傳遞函數方框圖,即為采用比例方向閥的閉環位置控制系統的數學模型,如圖4所示。

圖4 比例方向閥的閉環位置控制系統的數學模型
由圖4可以求得系統的開環傳遞函數為

該系統的特點如下:
(1)系統為0型系統。這類系統由1個比例環節、1個慣性環節和2個二階環節組成。
(2)需PI或PID校正。0型系統一般在穩定性、穩態精度和快速性之間存在矛盾。因此,這種系統一般都要用PI或PID裝置對系統進行校正或補償,使其在動態性能上達到要求。
若考慮干擾量FL的輸入,系統的傳遞函數方框圖如圖5所示。

圖5 有擾動輸入的閉環系統數學模型
閉環控制系統能夠自動克服干擾,當干擾出現時,改變控制量,使得本來穩定的系統偏離平衡值,但閉環系統能夠自動調節過來,使系統恢復平衡,保持正常的工作。
2 系統特性
流量死區特性為比例閥的固有特性,是因比例閥閥芯的正遮蓋量和庫侖摩擦形成的。通過空載條件下閥芯位移死區測量試驗來確定死區的大小。閥芯位移死區由內摩擦阻尼、閥芯復位彈簧及電信號響應的滯后等造成,且A、B向的死區大小并不對稱,這由電磁鐵的個體差異造成。經過試驗測定,比例方向閥死區占額定輸入值的15%25%,此即為死區的初始補償量。實際上,比例方向閥死區大小是隨工況而變的。當閥口壓降變化時,死區范圍隨之變化;油液溫度也能影響死區的大小。因此,比例閥流量死區特性實際上具有變死區特性。對于閥控缸系統,比例流量閥死區是否得到準確補償,直接關系到系統的定位精度和穩定性。
比例方向閥死區使得閥芯在通過中位時,執行機構將有一段時間不能響應指令信號,對于以零位為工作點或需要反復過零位的閉環系統,這種死區將嚴重影響系統控制品質,甚至使系統無法工作。由實驗測得的比例閥死區曲線如圖6所示,其中橫坐標表示電壓 (-1010 V),縱坐標表示液壓缸的行進速度 (-350150 mm/s)。從系統安全性以及便于觀察的角度來考慮,將系統的運行速度控制在-50~+50 mm/s之間,也就是將輸入電壓控制在-3~+7 V之間。

圖6 比例閥死區曲線
3 模糊控制器的設計
3.1 變死區模糊補償的設計思想
死區補償的目的是通過給閥的驅動電路較大零位增益,使得閥芯快速通過其中位附近的重疊區,減弱死區的滯后效應,增加系統的響應速度,提高位置控制精度。因此,可采用模糊控制對非線性系統進行控制,以系統定位誤差及誤差變化率為判據,判斷是否達到期望的位置精度以確定死區補償值。同時考慮到比例閥死區特性以及液壓缸的不對稱性,需要對模糊輸出進行補償。通過試驗測得,當正向電壓小于3.8 V時,系統進入死區狀態,因此采用以下的補償方法對其進行補償。通過補償,可改善系統性能,提高快速性和準確性。

其中:e為偏差電壓;
U為模糊控制量輸出。
3.2 輸入輸出變量及隸屬函數的確定
該系統采用二維模糊控制器[4],因此選擇偏差e和偏差的變化率ec作為模糊控制器的輸入,u為控制器的輸出。
取e,ec和u的模糊子集為 {負大,負中,負小,零,正小,正中,正大},一般用英文字母縮寫表示為{NB,NM,NS,ZO,PS,PM,PB}。根據實際將e,ec的論域設為{-5,-4,-3,-2,-1,0,1,2,3,4,5};由實驗可以得知,液壓缸的運動存在嚴重的不對稱性,為了獲得最佳的控制效果,將u的論域設為{-2,-1,0,1,2,3,4,5}。
在實際控制問題中,模糊集合的隸屬函數采用三角形,其數學表達和運算簡便,占有內存空間小,可達到控制要求。e,ec,u的隸屬度函數分別如圖7(a),(b),(c)所示。

圖7 隸屬度函數
3.3 模糊控制規則及決策方法的確定
通過多次試驗的經驗總結,結合理論分析,歸納出偏差e、偏差變化率ec和控制器的輸出u之間的關系,得實驗中所建立的模糊控制規則表原則是:當誤差大或者較大時,選擇控制量以盡快消除誤差為主;當誤差較小時,選擇控制量要注意防止超調,以系統穩定為主。
根據控制要求以及選取的e,ec,u的語言變量詞集,現將操作者在操作過程中遇到的各種可能出現的情況和相應的控制策略匯總為表1。該規則庫由雙輸入、單輸出規則構建,各參數調節規則的基本結構為If A and B then C,共49條模糊規則。

表1 模糊控制規則表
模糊推理采用工程上常用的Mamdani推理算法,即“max-min”合成規則進行模糊運算,解模糊策略選擇最大隸屬度法[5-6]。模糊決策的最大隸屬度原則就是選擇模糊集中隸屬度最大的那個元素,作為觀測結果。
4 基于LabVIEW的模糊控制程序設計
4.1 模糊控制程序的設計
電液比例位置控制系統是基于LabVIEW8.5版本并結合模糊控制工具包進行設計的[7]。該設計的前面板及程序框圖如圖8和9所示,主要是完成一個位置閉環控制系統。當實際采集到的位移與目標位移不相等,即產生偏差,將偏差送給控制器,進行調節。當實際位移比目標位移小時,偏差為正,控制器的輸出接通模擬輸出的0通道,液壓缸繼續前進;當實際位移比目標位移大時,偏差為負,這時控制器的輸出接模擬輸出的第一通道,液壓缸開始向后退,最終達到目標位移。
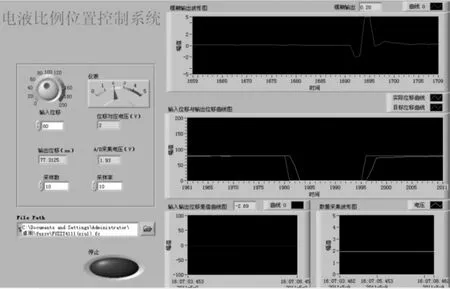
圖8 實現模糊控制器設計的VI前面板程序
4.2 實驗研究
實驗時,讓液壓缸在0200 mm位移處做往復運動,對液壓缸進行實時位置控制。模糊控制器的參數以及控制規則是通過大量實驗確定的,選擇了一個實驗結果相對較好的,保存成.fc文件,載入該文件后點擊運行,開始實驗。
(1)對系統輸入80 mm的階躍信號,其響應曲線如圖10所示。由圖可以得知,目標位移為80 mm,而實際位移為80.16 mm,相對誤差為0.05%,系統達到穩態的時間約2 s。
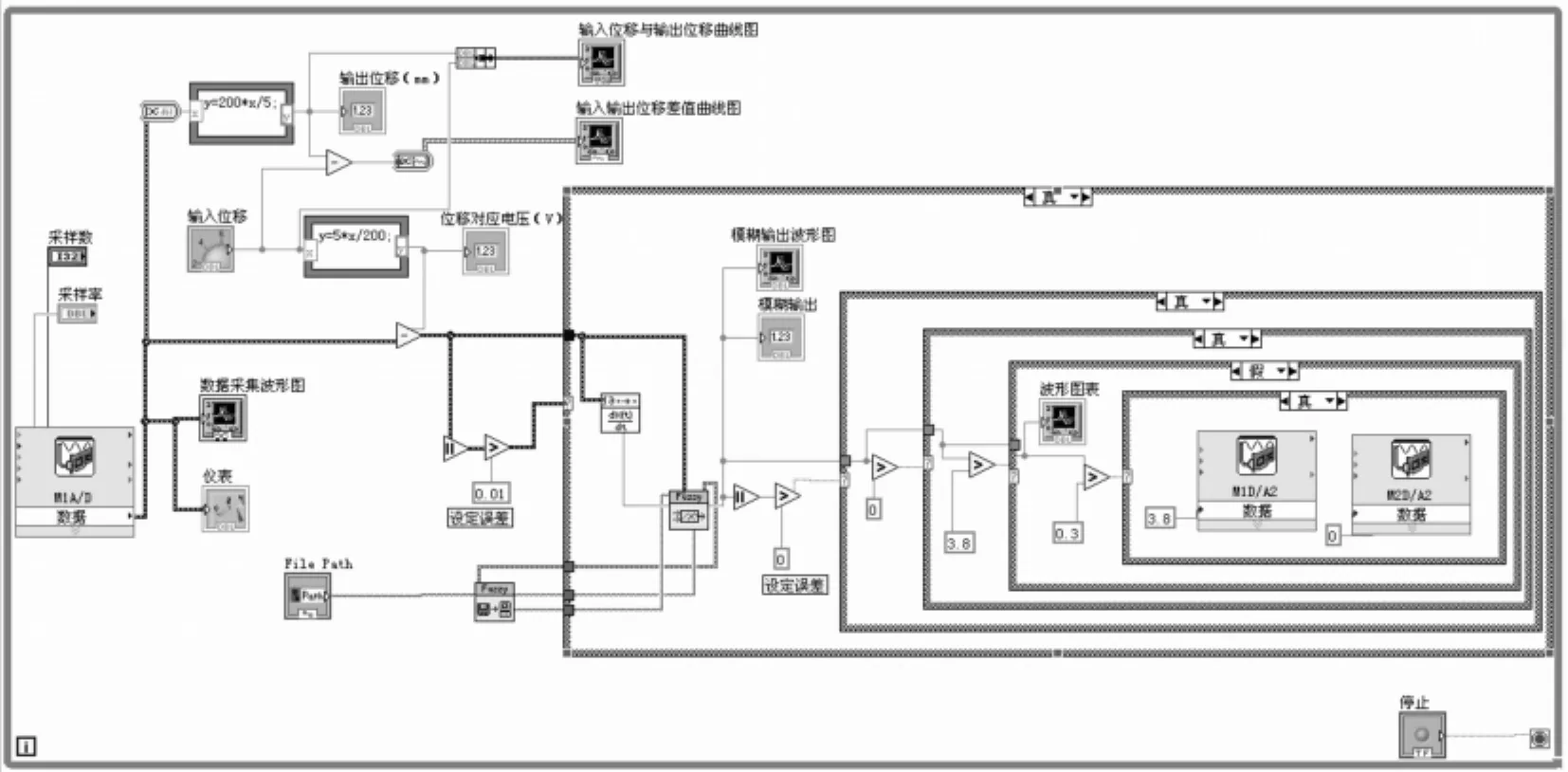
圖9 模糊控制程序框圖
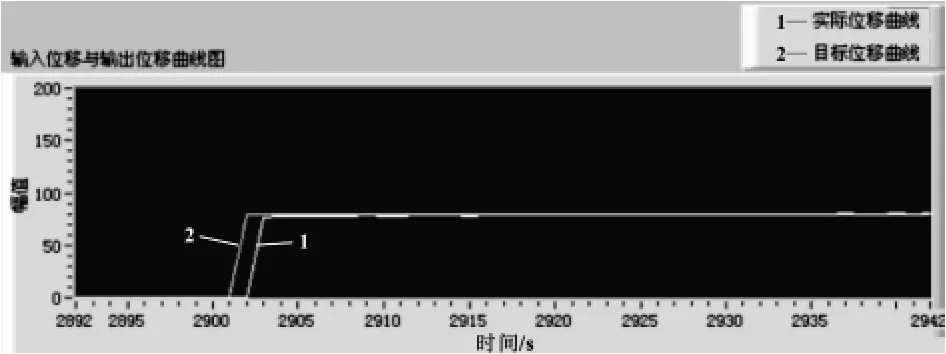
圖10 80 mm階躍響應曲線
(2)對系統輸入幅值為0的階躍信號,其響應曲線如圖11所示。可知:目標位移為0,而實際位移分別為0.33 mm,相對誤差0.11%,系統到達穩態的時間約為3 s。

圖11 0階躍響應曲線
(3)重復前進和后退兩個實驗,其響應曲線如圖12所示。當目標位移為80 mm時,實際位移為79.31 mm,相對誤差為0.23%,系統到達穩態的時間約為2 s;當目標位移為0時,實際位移為0.37 mm,相對誤差為0.12%,系統到達穩態的時間約為3 s。
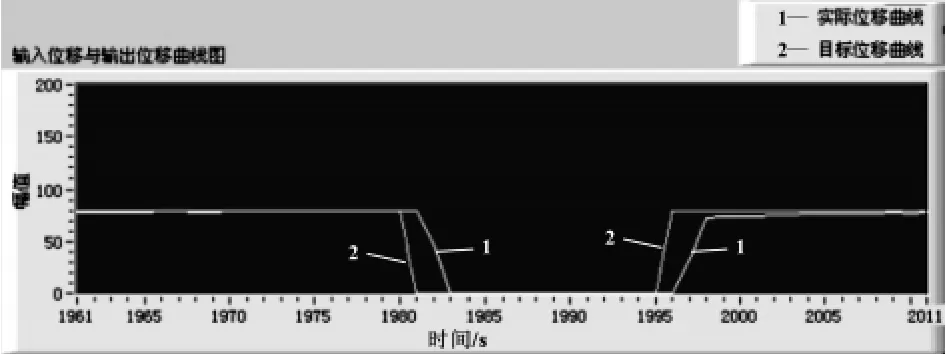
圖12 80 mm和0階躍響應曲線
5 PID控制實驗結果
采用位置式的PID控制算法,KP、KI、KD各系數通過試湊來確定[8]。取KP=30,KI=0.1,KD=0,分別對系統輸入80,0,80和0 mm的階躍信號,其響應曲線如圖13(a),(b),(c)所示。

圖13 PID響應曲線圖
從實驗曲線可得:PID控制系統誤差在±1.5 mm內,平均控制精度為98.3%;而模糊控制系統誤差在±1 mm左右,控制精度高達99.5%以上;對于快速性,PID控制系統到達穩態的時間是79 s,而模糊控制系統到達穩態只需要23 s的時間,因此系統的響應速度有很大程度的提高。
6 結論
試驗結果表明:基于LabVIEW開發平臺設計的電液比例位置控制系統,通過模糊控制算法對電液比例閥的死區進行了補償,并改善了液壓缸運動的不對稱性。與PID控制算法進行比較,模糊控制算法在快速性、準確性以及穩定性方面都有相當程度的提高,并且在運行過程中也基本無明顯震蕩,能很好地完成位置控制任務,滿足一般工業控制要求。
【1】許益民.電液比例控制系統分析與設計[M].北京:機械工業出版社,2005:220-226.
【2】BORA Eryilmaz.Improved Nonlinear Modeling and Control of Electro Hydraulic Systems[D].Boston:Northeastern U-niversity,2000:12-40.
【3】梁利華.液壓傳動與電液伺服系統[M].哈爾濱:哈爾濱工程大學出版社,2005:220-226.
【4】Fuzzy Logic for G Toolkit Reference Manual[M].NationalInstruments,1997.
【5】諸靜.模糊控制原理與應用[M].北京:機械工業出版社,2001:105-123.
【6】朱銀發,陳冰冰,安磊.電液比例位置控制系統的自整定模糊PID控制研究[J].機床與液壓,2010,38(8):98-101.
【7】JOHNSON Gary W,JENNINGS Richard.LabVIEW圖形編程[M].北京:北京大學出版社,2002.
【8】金志強,包啟亮.一種基于LabVIEW的PID控制器設計的方法[J].微計算機信息,2005,21(6):1-2.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
