基于HALCON的雙目視覺系統標定
2013-03-30 06:54:42項輝宇韓寶安黃佳軍
機電產品開發與創新 2013年3期
關鍵詞:方法
李 哲,項輝宇,韓寶安,黃佳軍
(北京工商大學 材料與機械工程學院,北京 100048)
0 引言
根據標定方式的不同,現有的相機標定方法可以分為傳統標定方法、自標定方法和基于主動視覺的標定方法。傳統標定方法是指利用一個尺寸已知的高精度標定物作為空間參照,通過建立標定物某點與其圖像點的對應關系,利用相關算法獲得相機的內外參數。此方法的不足在于標定物的制造成本高,其精度直接影響標定結果,而且某些場合下不適合放置標定物。自標定方法是指不需要標定物,僅利用場景約束或相機運動約束,依靠多幅圖像對應點之間的關系進行標定。但此方法標定精度不高,不合適在精確測量的場合下使用。基于主動視覺的標定方法是指在己知相機的某些運動信息下標定相機的方法。雖然此算法簡單,魯棒性較高,但是該方法需要使用高精度主動視覺平臺進行相機標定,實驗設備昂貴,實驗條件要求高,且不適合運動參數未知或無法控制的場合。因此,在以上標定方法的基礎上,本文介紹一種利用HALCON軟件的平面圓靶標雙目視覺標定方法。實驗證明此方法測量精度高,魯棒性強,適用范圍廣。
1 雙目視覺系統以及標定的原理
1.1 雙目視覺系統原理
雙目立體視覺是立體視覺的一種重要形式,它是基于雙目視差理論并利用成像設備從不同的位置獲取被測物體的幅圖像,通過計算圖像對應點間的位置偏差,從而獲取物體三維幾何信息的方法。圖1是雙目視覺系統的原理圖,其中,b是兩個相機光心的距離,f是相機的主距。相機坐標系的原點位于光心處,成像平面本應該位于相機坐標系之后,但是為了簡化計算過程,假想的使成像平面位于相機坐標系之前。圖像坐標系建立在成像平面上,其坐標軸用u、r表示。P是空間中一點,它在圖像坐標系的投影分別是P',P",像P這樣的點被稱為共軛點。
1.2 標定原理
在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其圖像對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。在大多數條件下這些參數必須通過實驗與計算才能得到,這個求解參數的過程就稱之為相機標定,這里的參數主要是指相機的內、外參數。在雙目視覺標定中,內參數是指左、右相機鏡頭主距f,鏡頭畸變k,像元大小Sx、Sy等。外參數主要是指左、右相機各自的相機坐標系相對于世界坐標系的關系,用旋轉矩陣R1和平移矢量T1表示左相機的相機坐標系與世界坐標系的關系,同理,R2,T2表示右相機的相機坐標系到世界坐標系的關系,以及右相機相對于左相機的位置關系,用一個旋轉矩陣R和一個平移矢量T表示。確定這些參數需要4個步驟。
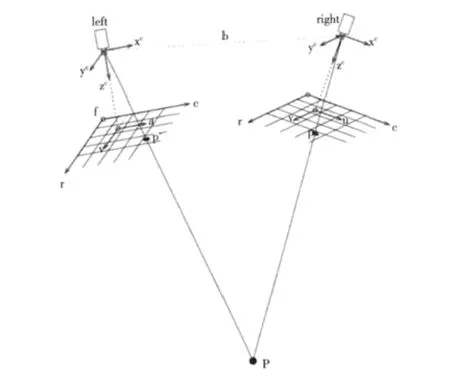
圖1 雙目系統原理圖Fig.1 Binocular System Schematic Diagram
(1)將世界坐標系中一點Pw=(xw,yw,zw)T轉換到相機坐標系中Pc=(wc,yc,zc)T,此變換為剛性變換,它們之間的變換關系是Pc=R'*Pw+T'。其中T'=(tx,ty,tz)是一個平移矢量,R'=(α,β,γ)是一個旋轉矩陣,α,β,γ表示物體分別繞攝像機坐標系x,y,z軸的旋轉角度。在R'和T'中6個參數 (α,β,γ,tx,ty,tz)稱為相機外參,它們決定了相機坐標系與世界坐標系之間的相對位置。
(2)將三維空間點Pc從相機坐標系投影到成像平面坐標系。可表示為:但是在實際投影過程中,由于鏡頭的畸變會導致坐標(u,v)T的值發生改變。對于大多數鏡頭而言,都可以認為是徑向畸變。此時,對應的關系式為:
(4)通過以上三步即可以獲得左、右相機各自的內外參數。假定空間中任意一點在世界坐標系,左、右相機坐標系下的非齊次坐標分別是 xw,x1,x2,則消去xw,得到:X2=R2R1-1x1+T2-R2R1-1T2,于是兩個相機間的位置關系可表示為:
2 標定的流程
HALCON是一套完善的標準的機器視覺算法包,擁有應用廣泛的機器視覺集成開發環境。它節約了產品成本,縮短了軟件開發周期,在工業界已經是公認具有最佳效能的Machine Vision軟件。
本文采用實時的方法對雙目視覺系統進行標定,使用的是HV-1302型工業相機。雙目標定與單目標定類似,不同的地方在于雙目標定必須保證標定板能夠同時出現在兩幅圖像中。圖2為實驗場景圖。
標定主要分四個步驟:①建立雙目相機的標定數據模型;②獲取合適的圖片;③把雙目相機的測試數據添加到標定數據模型中;④執行標定。
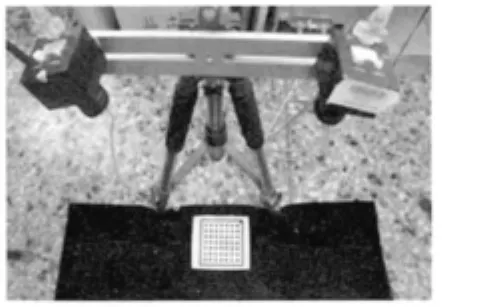
圖2 實驗場景Fig.2 Experiment scene
2.1 建立標定數據模型
在建立標定數據模型之前, 應該先調用算子Open_ Framegrabber和Grab_Image保證同時打開左右相機,然后調用算子Create_Calib_Data產生一個標定數據模型,在這個算子中輸入值是所使用的相機的個數以及標定板的個數,返回值是標定數據模型句柄CalibDataID。產生了這個標定數據模型句柄之后,需要向模型中添加相機的初始內部參數以及相機類型,此時用到算子Set_Calib_Data_Cam_Param,在HALCON中,初始內部參數的鏡頭畸變應該設置為零,相機類型是面陣相機。把關于標定板的描述文件輸入到數據模型當中,此時用到算子Set_Calib_Data_Calib_Object,模型句柄的初始化完成。
2.2 獲取圖像
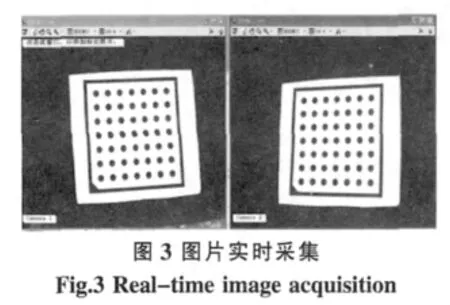
同時打開相機進行采集,在雙目視覺系統中,每個相機都要拍攝多張標定板在不同位置的圖片。本文中,拍攝了15張不同位置的圖片,標定板的表面不能有污點,并且需要保證每幅圖片中都應該能包含標定板,所使用的標定板大小是(100×100)mm,每個提取的圓的像素都應該大于10個像素。在采集圖像的過程中相機的相對位置絕對不能改變,還要保證每幅圖像有合適的曝光,不能過曝或者曝光不足。圖3為實時采集圖。
2.3 讀取標定參數
在采集圖像的同時,為確保每幅圖像都能夠滿足要求,需要實時的對采集圖像進行處理,此時就要用到Find_Caltab和Find_Marks_And_ Pose。算子Find_Caltab能夠找到找到標定板上黑框里面的部分,Find_Marks_And_Pose找到每個圓點的中心并確定它們相應的世界坐標。當無法定位標定板區域時,則會提示重新移動標定板的位置再進行采集,當算子都成功的執行之后,表示此時采集到的圖像滿足要求。把采集到的參數通過算子 Set_Calib_Data_Observ_Points輸入到標定數據模型句柄中。
2.4 執行標定
最后根據標定數據模型中的數據,調用算子Calibrate_Cameras,就可以執行標定。當執行完這個算子后就可以獲取糾正后的相機的主距、鏡頭畸變、圖像中心點的坐標值、以及兩個相機的相對位置,并且這些值仍返回在模型句柄中,可以通過算子Get_Calib_Data對相關參數進行調用。通過以上操作,得到的結果如表1,表2所示。
從標定結果中可以看出,左、右相機的徑向畸變值均為負值,說明它們都成桶形畸變,左、右相機的主距相差較小;相機的結構參數中旋轉矩陣R為 [1.4837 330.699 359.313],說明右相機相對于左相機的X軸旋轉1.483°、Y軸的反方向29.301°、Z軸的反方向0.687°,可以判斷出右相機幾乎只繞左相機的Y軸旋,即兩個相機向內傾斜了29.301°;平移矢量T為 [25.884 0.2303.139],說明右相機在左相機右方 25.884cm、上方0.230cm、前方3.319cm的位置。標定結果與相機的實際擺放位置吻合,說明標定結果準確。
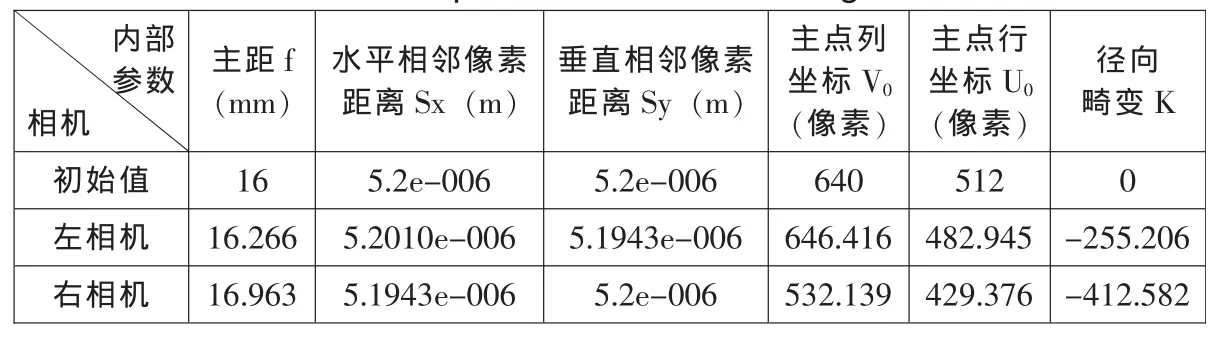
表1 左、右相機的內部參數Tab.1 Internal parameters of left and right camera

表2 左、右相機的結構參數Tab.2 Structural parameters of left and right camera
3 結論
本文介紹了一種基于HALCON的雙目視覺標定方法。先說明雙目視覺系統的原理,然后介紹標定原理,以及如何使用HALCON進行標定,通過實驗證明,此方法精度高,操作簡單,可以有效的應用于機器視覺系統中。
[1]馬頌德,張正友.計算機視覺:計算理論與算法基礎[M].北京:科學出版社,1998.
[2]劉金頌,原思聰,張慶陽,等.雙目立體視覺中的攝像機標定技術研究[J].計算機工程與應用,2008,6.
[3]成小龍,徐友春,李華,賈鵬.基于Halcon軟件的雙目立體視覺系統標定[J].軍事交通學院學報,2011,9.
[4]李鵬,王軍寧.攝像機標定方法簡述[J].傳感器世界,2007,3.
[5]楊少榮,吳迪靖,段德山(譯).機器視覺算法與應用[M].北京:清華大學出版社,2008.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56