基于TDOA的無(wú)線定位方法及其性能分析
2013-03-22 19:21:04史小紅
關(guān)鍵詞:信號(hào)
史小紅
(東南大學(xué)信息科學(xué)與工程學(xué)院,南京 210096)
無(wú)線定位系統(tǒng)主要通過(guò)估計(jì)目標(biāo)節(jié)點(diǎn)到接收機(jī)的距離或者角度對(duì)目標(biāo)節(jié)點(diǎn)進(jìn)行測(cè)距,進(jìn)而計(jì)算位置信息.無(wú)線測(cè)距技術(shù)可分為基于信號(hào)接收強(qiáng)度(RSSI)的測(cè)距技術(shù)、基于信號(hào)到達(dá)角度(AOA)的測(cè)距技術(shù)和基于信號(hào)傳輸時(shí)間(TOF)的測(cè)距技術(shù)等.基于信號(hào)接收強(qiáng)度的測(cè)距技術(shù)是根據(jù)接收到的信號(hào)強(qiáng)度測(cè)出目標(biāo)節(jié)點(diǎn)到接收點(diǎn)的距離[1-2].該方法簡(jiǎn)單、易用,但易受無(wú)線環(huán)境中的多徑衰落、非視距阻擋等影響[3],其定位誤差較大,通常會(huì)達(dá)到20%~40%,不能滿足高精度定位的要求.基于信號(hào)到達(dá)角度的測(cè)距技術(shù)通過(guò)檢測(cè)無(wú)線信號(hào)到達(dá)天線陣的相位差來(lái)估計(jì)發(fā)送節(jié)點(diǎn)的方向.這種測(cè)距技術(shù)受接收信噪比影響較小,但是受信道干擾和多徑效應(yīng)的影響很大[4].
基于信號(hào)傳輸時(shí)間的測(cè)距技術(shù)(TOF)[5]是目前研究最廣泛的測(cè)距技術(shù),其中基于信號(hào)傳輸時(shí)間差的測(cè)距技術(shù)(TDOA)因相對(duì)容易實(shí)現(xiàn)而更受重視.TDOA技術(shù)的核心思想是測(cè)量發(fā)射節(jié)點(diǎn)(即目標(biāo)節(jié)點(diǎn))到達(dá)2個(gè)接收節(jié)點(diǎn)之間的時(shí)間差,再根據(jù)時(shí)間差計(jì)算距離,進(jìn)而根據(jù)雙曲線定位原理計(jì)算出發(fā)射節(jié)點(diǎn)的位置.對(duì)目標(biāo)節(jié)點(diǎn)進(jìn)行定位的誤差主要來(lái)自2個(gè)方面:一是測(cè)距誤差;二是根據(jù)測(cè)距值計(jì)算目標(biāo)節(jié)點(diǎn)位置產(chǎn)生的誤差.前者是由于無(wú)線傳輸過(guò)程中多個(gè)因素的影響產(chǎn)生的,包括發(fā)射機(jī)和接收機(jī)之間的頻率偏差、無(wú)線多徑效應(yīng)等.后者是由于雙曲線定位中的非線性引起的,這種非線性會(huì)放大定位誤差.本文將主要分析頻偏和多徑對(duì)定位誤差的影響程度,并給出降低影響的方法.
本文建立了一個(gè)考慮多徑和頻偏因素的TDOA定位系統(tǒng)模型,其中發(fā)射信號(hào)采用QPSK調(diào)制的復(fù)數(shù)擴(kuò)頻序列.分析了頻偏、多徑等因素對(duì)到達(dá)時(shí)間差測(cè)量的影響,推導(dǎo)了數(shù)學(xué)表達(dá)式,并給出了仿真結(jié)果.提出了減少頻偏和多徑對(duì)到達(dá)時(shí)間差測(cè)量影響的方法.在實(shí)際開(kāi)發(fā)的系統(tǒng)上進(jìn)行了定位實(shí)驗(yàn),結(jié)果表明,在室內(nèi)環(huán)境下的定位結(jié)果良好.
1 TDOA定位原理
1.1 發(fā)送信號(hào)到達(dá)2個(gè)接收機(jī)的時(shí)間差
用圖1所示的結(jié)構(gòu)來(lái)討論如何計(jì)算發(fā)射信號(hào)s(t)到達(dá)2個(gè)接收點(diǎn)r1(t)和r2(t)之間的時(shí)間差τ(τ=τ1-τ2).
發(fā)送節(jié)點(diǎn)到接收機(jī)之間的信號(hào)傳輸模型如圖2所示.設(shè)發(fā)送節(jié)點(diǎn)的基帶信號(hào)為復(fù)數(shù)擴(kuò)頻序列,表達(dá)式為x(n)=xI(n)+jxQ(n),擴(kuò)頻長(zhǎng)度為L(zhǎng),發(fā)送節(jié)點(diǎn)的載波頻率為ωT,采用QPSK調(diào)制,則發(fā)送的射頻信號(hào)表達(dá)式為

圖1 發(fā)送節(jié)點(diǎn)到2個(gè)接收機(jī)的時(shí)間差
s(n)=x(n)ejωTn
(1)
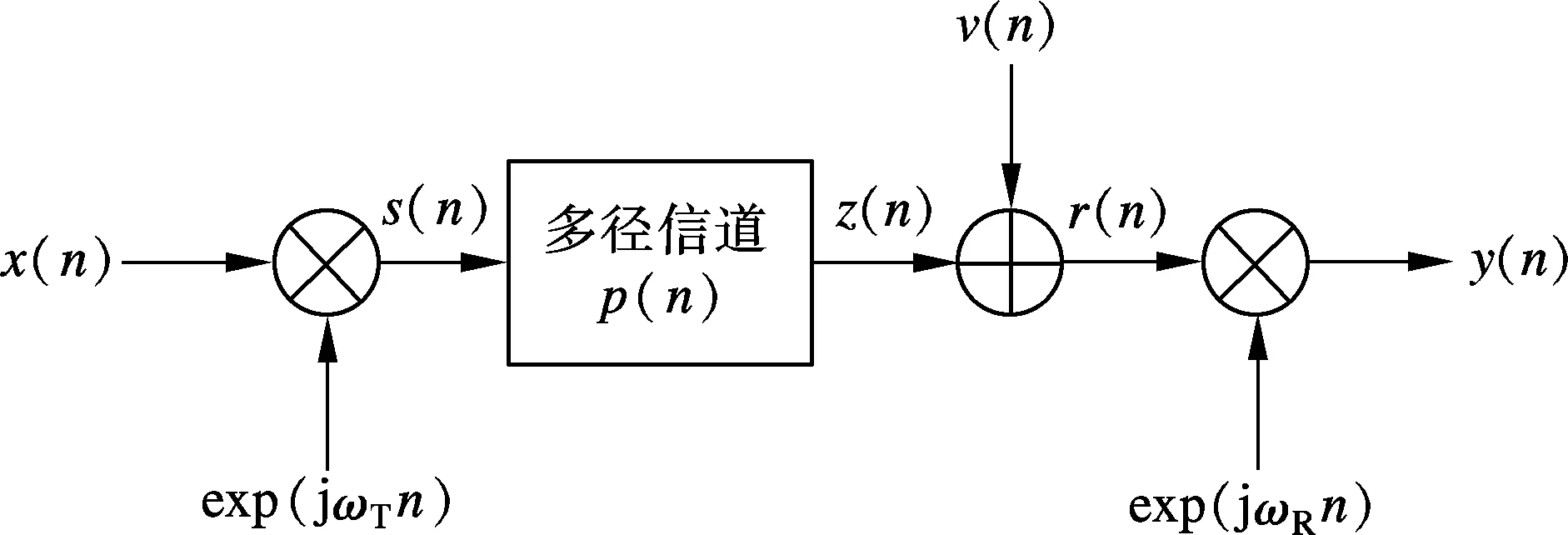
圖2 發(fā)送節(jié)點(diǎn)與接收機(jī)之間的信號(hào)傳輸模型
該信號(hào)經(jīng)過(guò)的多徑信道為p(n),則

(2)
式中,p(m)為第m條路徑上的衰減系數(shù).當(dāng)射頻信號(hào)s(n)在頻率為2.4 GHz時(shí)(如Zigbee節(jié)點(diǎn)),其波長(zhǎng)僅為12.5 cm.從式(2)不難看出,多徑的存在可能會(huì)造成接收信號(hào)z(n)的衰落.由于信號(hào)波長(zhǎng)很短,信號(hào)在空間衰落很頻繁.當(dāng)信道上有噪聲v(n)(這里假定為AWGN噪聲)時(shí),則接收天線上接收到的信號(hào)為

(3)
假定接收機(jī)下變頻器的本振頻率為ωR,采用正交下變頻得到接收的基帶信號(hào)為
y(n)=r(n)e-j(ωRn+φ0)
(4)
把式(3)代入式(4),并進(jìn)行推導(dǎo),得
y(n)=e-jφ0[p′(n)*x(n)]ejΔωn+v′(n)
(5)
其中,p′(n)=p(n)e-jωTn,n=0,1,…,N-1;Δω=ωT-ωR;v′(n)=v(n)e-j(ωRn+φ0).式(5)也可用圖3的等效模型來(lái)描述.
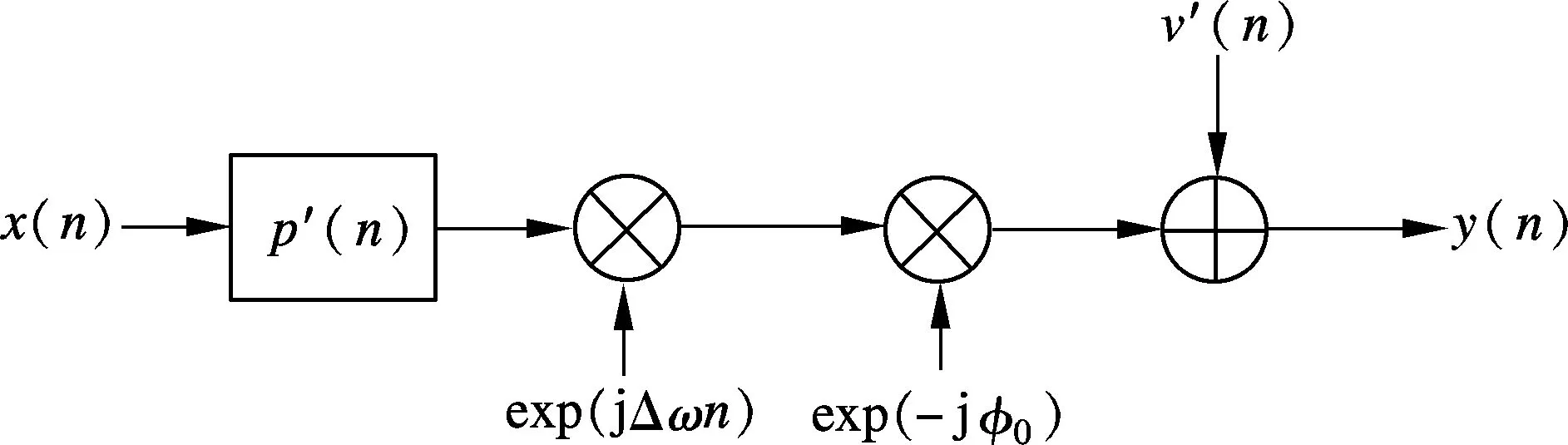
圖3 無(wú)線信道中的基帶信號(hào)傳輸?shù)刃P?/p>
圖3表明,基帶信號(hào)在無(wú)線信道中傳輸時(shí)會(huì)受到多徑p′(n)、頻偏Δω、相偏φ0以及噪聲v′(n)的影響.后續(xù)分析表明,這些因素可能會(huì)影響到時(shí)間差的測(cè)量精度.
在短距離無(wú)線通信中,基帶信號(hào)x(n)經(jīng)常采用復(fù)數(shù)擴(kuò)頻調(diào)制,如TI公司CC24xx系列的芯片[6],它遵循IEEE 802.15.4物理層標(biāo)準(zhǔn).在該芯片中,將發(fā)送數(shù)據(jù)以4 bit分為一組,映射為長(zhǎng)度L=32的擴(kuò)頻切普序列符號(hào).以符號(hào)“0”為例,其對(duì)應(yīng)的復(fù)數(shù)擴(kuò)頻序列為xI(n)={1010100100010111},xQ(n)={1101100111000010},如圖4所示.

圖4 IEEE 802.15.4采用的物理層復(fù)擴(kuò)頻信號(hào)
圖4中的基帶復(fù)信號(hào)x(n)經(jīng)過(guò)無(wú)線信道傳輸后,變?yōu)槭?5)描述的復(fù)信號(hào)y(n).兩者之間的時(shí)間差即信號(hào)經(jīng)無(wú)線信道的傳輸時(shí)間,可以通過(guò)y(n)與x(n)的互相關(guān)運(yùn)算獲得.設(shè)y(n)=yI(n)+jyQ(n),則y(n)與x(n)的互相關(guān)值為
Rxy(n)=x(n)?y*(n)=[xI(n)?yI(n)+
xQ(n)?yQ(n)]+j[xQ(n)?yI(n)-
xI(n)?yQ(n)]
(6)
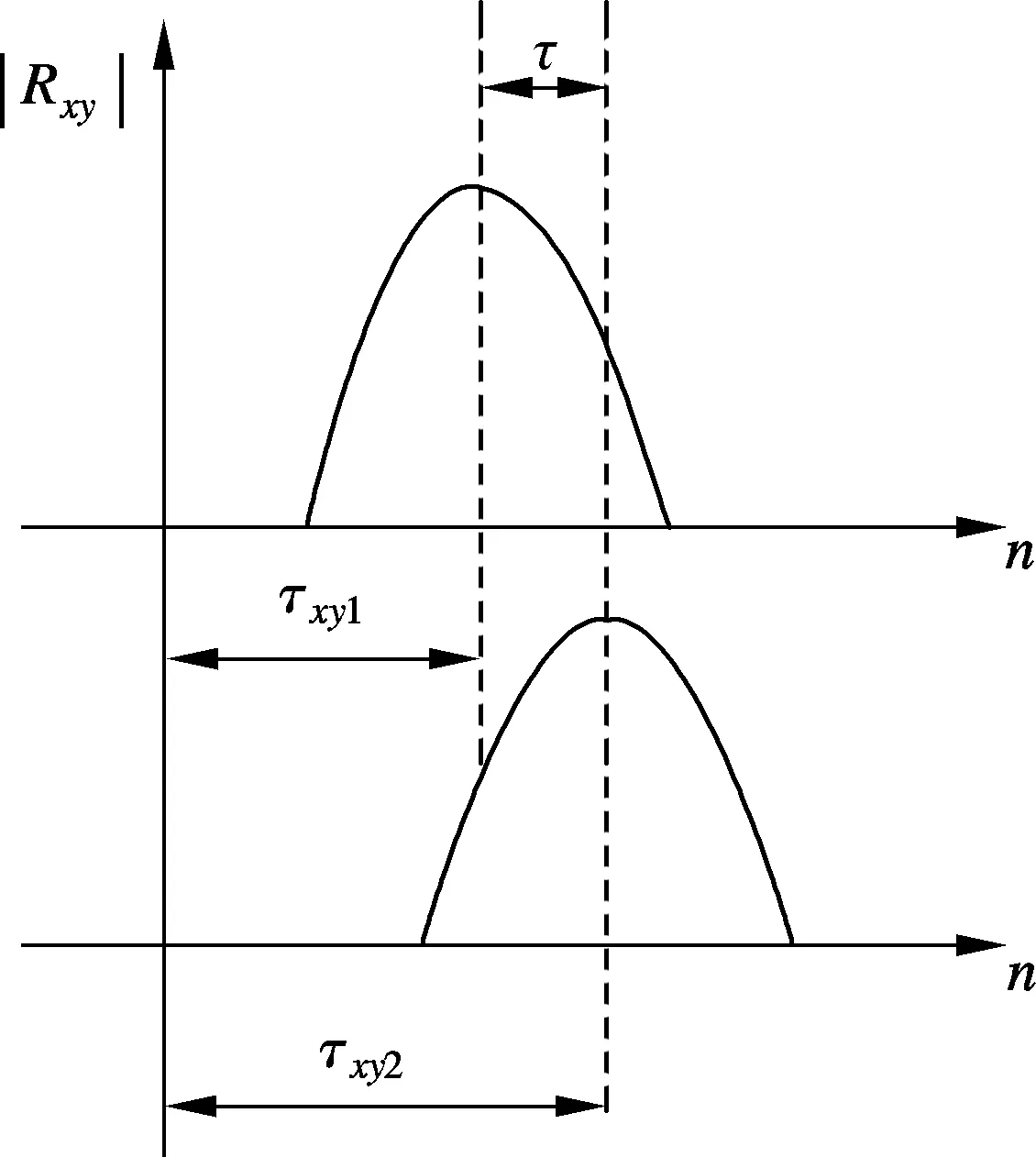
圖5 2個(gè)信號(hào)的到達(dá)時(shí)間差
發(fā)送節(jié)點(diǎn)到2個(gè)接收機(jī)之間的距離差可由信號(hào)的到達(dá)時(shí)間差計(jì)算出來(lái).根據(jù)TDOA原理,至少需要3個(gè)接收機(jī)(即2個(gè)時(shí)間差)才能確定出平面上一個(gè)發(fā)送節(jié)點(diǎn)的位置,至少需要4個(gè)接收機(jī)(即3個(gè)時(shí)間差)才能確定出立體空間中一個(gè)發(fā)送節(jié)點(diǎn)的位置.
1.2 基于到達(dá)時(shí)間差的發(fā)送節(jié)點(diǎn)位置計(jì)算


圖6 基于TDOA測(cè)距技術(shù)的定位示意圖
圖6中,α為水平坐標(biāo),β為垂直坐標(biāo).假定接收節(jié)點(diǎn)i和k的位置已知,其坐標(biāo)分別為(αi,βi)和(αk,βk),發(fā)送節(jié)點(diǎn)的位置為(μ,η),可得到目標(biāo)節(jié)點(diǎn)到錨節(jié)點(diǎn)i和k的到達(dá)時(shí)間差為

(7)
同樣可得,目標(biāo)節(jié)點(diǎn)到達(dá)節(jié)點(diǎn)i和l的時(shí)間差為
(8)
根據(jù)式(7)、(8),當(dāng)測(cè)得時(shí)間差τik和τil后,即可確定節(jié)點(diǎn)的位置坐標(biāo)(μ,η).在定位平面中,時(shí)間差的等差線是一條雙曲線,而目標(biāo)節(jié)點(diǎn)的位置就是由2條雙曲線的交點(diǎn)確定的.但在實(shí)際測(cè)試中,由于噪聲、干擾、多徑、頻偏等多種因素的影響,這2條雙曲線的相交關(guān)系存在3種情況:① 2條曲線交于1點(diǎn);② 2條曲線交于2點(diǎn);③ 2條曲線沒(méi)有交點(diǎn).如圖7所示.圖7(a)中,目標(biāo)節(jié)點(diǎn)的位置直接由交點(diǎn)確定;圖7(b)中,目標(biāo)節(jié)點(diǎn)的位置由2個(gè)交點(diǎn)的中間點(diǎn)確定;而圖7(c)中,目標(biāo)節(jié)點(diǎn)的位置由2條曲線的最近點(diǎn)的中間點(diǎn)確定.

圖7 2條時(shí)間差曲線的相交關(guān)系
為克服由于到達(dá)時(shí)間差測(cè)量誤差引起的目標(biāo)節(jié)點(diǎn)位置定位不準(zhǔn)確的問(wèn)題,通常采用的方法有:① 增加到達(dá)時(shí)間差測(cè)量次數(shù),然后對(duì)時(shí)間差取平均.這種方法會(huì)減少隨機(jī)因素帶來(lái)的測(cè)量誤差,但會(huì)增加定位時(shí)間.② 增加定位天線數(shù),然后根據(jù)最小二乘等算法確定目標(biāo)節(jié)點(diǎn)的位置[7-9].這種方法有利于縮小定位誤差,但過(guò)多的定位天線數(shù)意味著需要過(guò)多的接收機(jī),這會(huì)大大增加定位系統(tǒng)的實(shí)現(xiàn)復(fù)雜度和成本.
2 頻偏和多徑對(duì)到達(dá)時(shí)間差的影響
參照式(6)和圖5,到達(dá)時(shí)間差是通過(guò)2個(gè)接收信號(hào)與發(fā)送信號(hào)之間的互相關(guān)峰值點(diǎn)的時(shí)間差來(lái)獲得的,因此需要分析頻偏對(duì)互相關(guān)值的影響.由圖5可知
τ=τxy2-τxy1=nmax[Rxy2]-nmax[Rxy1]
(9)
式中,nmax[Rxy2]表示取Rxy2最大值對(duì)應(yīng)的時(shí)刻.


(10)
同樣可得


(11)
從式(11)可看出,互相關(guān)值與頻偏和多徑的關(guān)系很復(fù)雜,難以給出更直接的關(guān)系表達(dá),可通過(guò)示例波形圖8進(jìn)行描述.這里給出了射頻頻率為2.4 GHz、頻偏為±20 kHz的2個(gè)接收機(jī),接收到的基帶信號(hào)與發(fā)送端的基帶信號(hào)按照式(10)和式(11)分別做互相關(guān)的結(jié)果.圖8中,橫軸為時(shí)間,即采樣點(diǎn)數(shù)(采樣率為300 MHz),縱軸為互相關(guān)值.
圖8(b)中2個(gè)互相關(guān)曲線的峰值點(diǎn)在時(shí)間上大約偏離10個(gè)采樣點(diǎn),即±20 kHz的頻率偏差會(huì)引起10 m的距離測(cè)量誤差.
下面分析多徑對(duì)到達(dá)時(shí)間差測(cè)量的影響.仍假定射頻頻率為2.4 GHz,接收機(jī)1收到的信號(hào)存在4條無(wú)線傳輸路徑,接收機(jī)2收到的信號(hào)只有直達(dá)徑,如表1所示.
由圖9可看出,多徑也會(huì)造成時(shí)間差測(cè)量的偏差.在上述條件下,誤差大約為1個(gè)采樣點(diǎn),對(duì)應(yīng)的空中距離為1 m,比頻偏的影響要小.這是因?yàn)楸?中假定有直達(dá)徑的存在,它對(duì)互相關(guān)峰值點(diǎn)的貢獻(xiàn)最大.
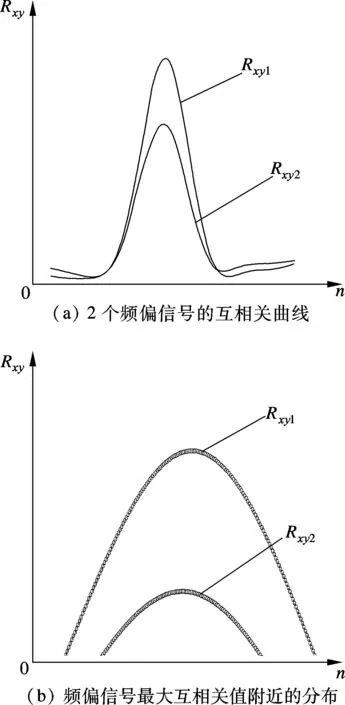
圖8 ±20 kHz頻偏對(duì)到達(dá)時(shí)間差測(cè)量的影響

表1 接收機(jī)多徑分布情況

圖9 4條路徑對(duì)到達(dá)時(shí)間差測(cè)量的影響
3 減小頻偏和多徑對(duì)時(shí)間差測(cè)量影響的方法
要克服頻偏對(duì)時(shí)間差測(cè)量的影響,必須估計(jì)式(10)、(11)中的e-jΔωn.這可以通過(guò)估計(jì)接收信號(hào)在一個(gè)符號(hào)內(nèi)的相位變化來(lái)獲得.對(duì)圖5中的調(diào)制信號(hào)相位變化分析可知,在一個(gè)符號(hào)的時(shí)間寬度內(nèi),相位的總變化量為零.如果接收信號(hào)y(n)在一個(gè)符號(hào)內(nèi)的總相位變化量不為零,則說(shuō)明存在頻偏.據(jù)此可得頻偏估計(jì)方法為
(12)
由式(12)可得頻偏估計(jì)值為
(13)
對(duì)后續(xù)的接收信號(hào)進(jìn)行頻偏校正,即
(14)
再用校正后的信號(hào)獲取信號(hào)的到達(dá)時(shí)間差.
圖9表明,無(wú)線傳輸環(huán)境的多徑會(huì)對(duì)到達(dá)時(shí)間差的測(cè)量產(chǎn)生影響.在對(duì)接收信號(hào)校正過(guò)頻偏后,頻偏的影響可以忽略,即有y(n)=p(n)*x(n).可推導(dǎo)得
Ryx(n)=[p(n)*x(n)]?x*(n)=p(n)*Rxx(n)
(15)
即多徑對(duì)發(fā)送信號(hào)的作用直接反映在收發(fā)信號(hào)的互相關(guān)函數(shù)上.對(duì)式(15)進(jìn)行解卷積運(yùn)算即可獲得對(duì)多徑的估計(jì),即
(16)
無(wú)線傳輸?shù)亩鄰浆F(xiàn)象使得接收信號(hào)可能出現(xiàn)衰落.在室內(nèi)環(huán)境所做的測(cè)試表明,在2.4 GHz頻段,由于波長(zhǎng)很短,空中每一點(diǎn)的信號(hào)衰落情況都不相同,有些點(diǎn)會(huì)出現(xiàn)深衰落.這不僅導(dǎo)致接收信噪比很低,還會(huì)激活接收機(jī)中射頻部分的自動(dòng)增益控制(AGC)單元,使得信號(hào)幅度呈現(xiàn)快速的抖動(dòng),這些都導(dǎo)致不能有效定位目標(biāo).為此,接收機(jī)必須具有多天線分集接收的能力,以減少接收信號(hào)的衰落,同時(shí)正確控制接收機(jī)中信號(hào)的幅度,使其在一次定位中是穩(wěn)定的.由于本文的目的是求取準(zhǔn)確的信號(hào)到達(dá)時(shí)刻,分集接收方案必須不能與時(shí)間因素有關(guān),否則會(huì)影響定位的精度,因此,宜采用多個(gè)獨(dú)立接收機(jī)的空中分集方案,而不能采用多徑合并的方案,如圖10所示.

圖10 采用3個(gè)獨(dú)立接收機(jī)的空間分集接收機(jī)示意圖
4 測(cè)試結(jié)果
為檢驗(yàn)上述定位方法的性能,采用了圖6所示的3個(gè)接收節(jié)點(diǎn)的定位方案.測(cè)量環(huán)境為室內(nèi)辦公環(huán)境,面積300 m2,有明顯多徑存在;目標(biāo)節(jié)點(diǎn)采用2.4 GHz CC2530 Zigbee模塊, 基帶切普速率為2 Mchip/s; 在接收機(jī)中,接收信號(hào)從射頻下變頻到基帶,然后將接收信號(hào)與本地序列進(jìn)行復(fù)數(shù)相關(guān)運(yùn)算;基帶信號(hào)采樣率為300 MHz;3個(gè)接收機(jī)的位置坐標(biāo)分別為A(-0.2 m,-6.0 m),B(-6.0 m,3.3 m),C(8.5 m,0 m); 目標(biāo)節(jié)點(diǎn)實(shí)際位置為T(mén)(0 m,-2 m).
測(cè)得的距離差及定位誤差情況如表2所示.表2中的定位位置誤差為測(cè)出的目標(biāo)節(jié)點(diǎn)的位置與其實(shí)際位置的歐氏距離偏差.A,B,C三點(diǎn)間的距離均約為12 m,平均偏差為0.34 m,因此采用本文方案的定位誤差平均為2.8%,優(yōu)于已有的基于TDOA的無(wú)線定位方法[12].
5 結(jié)語(yǔ)
本文研究了基于TDOA的無(wú)線定位中影響定位精度的關(guān)鍵技術(shù)問(wèn)題,提出了校正頻偏和克服多徑的方法,形成了具有實(shí)用價(jià)值的無(wú)線高精度定位方案.由于在計(jì)算多個(gè)接收機(jī)之間的時(shí)間差時(shí)需要嚴(yán)格的時(shí)間同步,這些接收機(jī)可部署在一部車輛上或者用電纜直接連接在一起,因此該方案可用于局部范圍內(nèi)對(duì)無(wú)線目標(biāo)的高精度定位.后續(xù)的研究可集中在對(duì)所測(cè)量到的時(shí)間差數(shù)據(jù)的處理上,如對(duì)數(shù)據(jù)進(jìn)行卡爾曼濾波,減少數(shù)據(jù)的擺幅,以及通過(guò)對(duì)同一目標(biāo)的多次定位進(jìn)一步提高定位精度等.
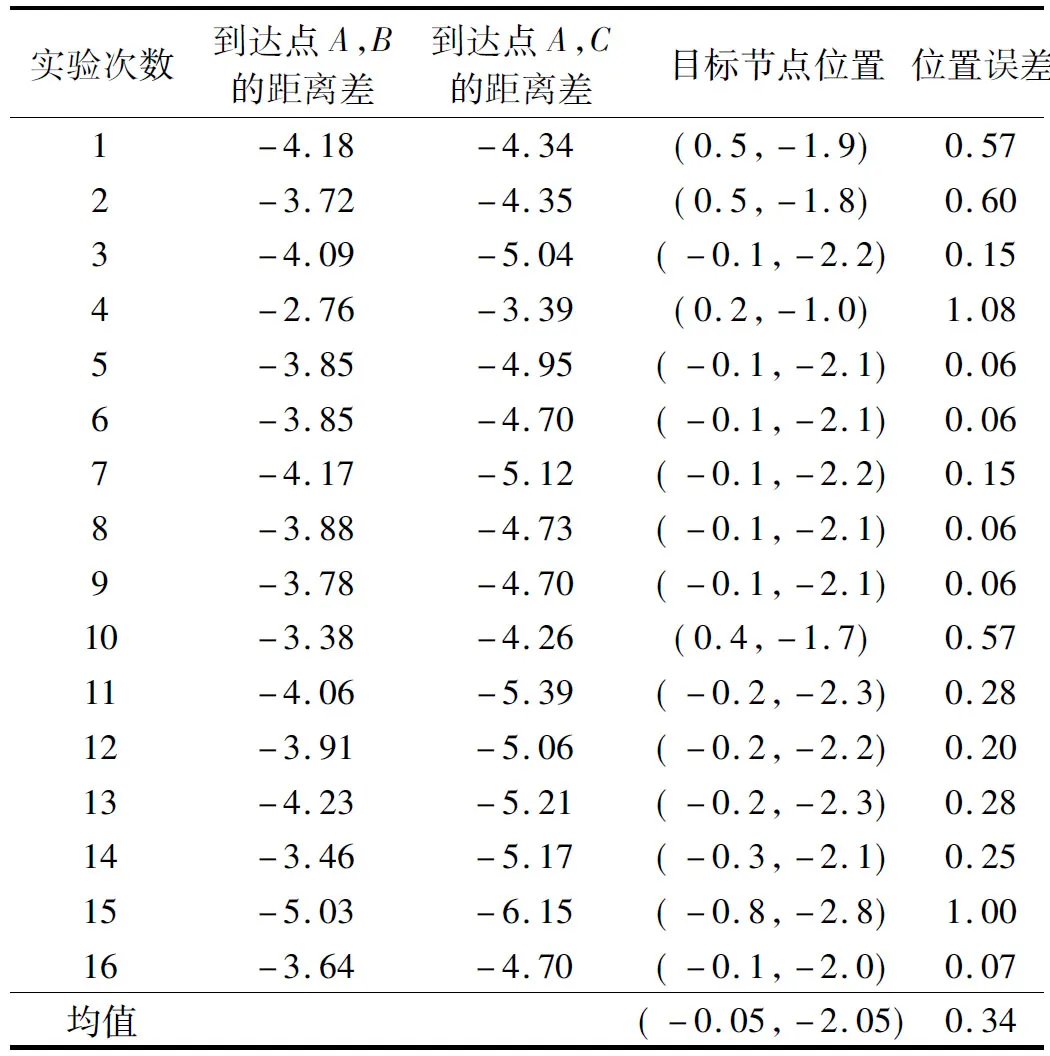
表2 測(cè)得的距離差及定位誤差情況 m
)
[1]孫佩剛, 趙海. 智能空間中RSSI定位問(wèn)題研究[J]. 電子學(xué)報(bào),2007,35(7):1240-1245.
Sun Peigang, Zhao Hai. Research on RSSI positioning problem in intelligent space [J].ChineseJournalofElectronics, 2007,35(7): 1240-1245. (in Chinese)
[2]Wang W D, Zhu Q X. RSS-based Monte Carlo localisation for mobile sensor networks [J].IETCommunications, 2008,2(5): 673-681.
[3]Sha K, Shi W, Watkins O. Using wireless sensor network for rescue application:requirements and challenges [C]//ProceedingofElectro/InformationTechnology. East Lansing, MI, USA, 2006: 239-244.
[4]Rappaport T S, Reed J H, Woerner B D. Position loca-
tion using wireless communications on highways of the future [J].IEEECommunicationsMagazine, 1996,34(10): 33-41.
[5]Priyantha N B, Chakraborty A, Balakrishnan H. The cricket location-support system [C]//ProceedingsoftheSixthAnnualACMInternationalConferenceonMobileComputingandNetworking. Boston, MA, USA, 2000: 32-43.
[6]Texas Instruments Incorporate. CC2430 Datasheet (rev. 2.1) SWRS036F [EB/OL]. (2012-02-16)[2012-06-20]. http://www.ti.com/product/2430.
[7]Chan Y T, HO K C. A simple and efficient estimator for hyperbolic location [J].IEEETransactionsonSignalProcessing, 1994,42(8): 1905-1915.
[8]So H C, Hui S P. Constrained location algorithm using TDOA measurements [J].IEICETransactionsonFundamentals,CommunicationsandComputerSciences, 2003, E86-A(12): 3291-3293.
[9]Li W C, Wei P, Xiao X C. A robust TDOA-based location method and its performance analysis [J].ScienceinChinaSeriesF—InformationSciences, 2009,52(5): 876-882.
[10]厲力華,何振亞. 關(guān)于多徑信號(hào)分辨及其性能界[J]. 東南大學(xué)學(xué)報(bào):自然科學(xué)版,1992, 22(5): 14-21.
Li Lihua, He Zhenya. On multipath signal distinguishing and its performance boundary [J].JournalofSoutheastUniversity:NaturalScienceEdition, 1992,22(5): 14-21. (in Chinese)
[11]Chung W C, SHa D. An accurate ultra wideband (UWB) ranging for precision asset location [C]//ProceedingsofIEEEConferenceonUltraWidebandSystemsandTechnologies. Grenoble, France, 2003: 389-393.
[12]彭宇,王丹. 無(wú)線傳感器網(wǎng)絡(luò)定位技術(shù)綜述[J].電子測(cè)量與儀器學(xué)報(bào),2011, 25(5): 389-396.
Peng Yu, Wang Dan. Summary of wireless sensor network positioning techniques[J].JournalofElectronicMeasurementandInstruments, 2011,25(5): 389-396. (in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06