冷發射實驗臺的模糊自適應串級控制仿真研究
2013-03-20 08:33:48韓洋洋馬大為樂貴高胡健孫德
機床與液壓 2013年5期
韓洋洋,馬大為,樂貴高,胡健,孫德
(南京理工大學機械工程學院,江蘇南京210094)
在冷發射系統中,導彈在發射過程中的彈射力會造成車體的震動進而影響導彈發射精度,實際工作過程中要求發射車在受到導彈彈射力作用后能夠快速穩定地恢復到穩定位置。文中主要通過液壓試驗平臺模擬發射車受到沖擊載荷的震動特性,該試驗平臺是由4個非對稱液壓缸共同支撐,每個液壓缸上裝有位移/速度傳感器。由于控制閥的壓力流量不確定性和非對稱液壓缸的往復運動,使得閥控液壓缸本身是一個非線性系統。經典PID控制自誕生以來由于結構簡單、運算量小被廣泛應用于各種工業控制領域,但是其缺點是系統抗外部擾動和控制非線性系統能力較差。模糊控制是人工智能控制的一種,可以有效利用先前控制經驗并將其轉化為推理邏輯,但是單獨模糊控制器的缺點是控制精度低。文獻[1]將模糊控制和PID 調節相結合,根據誤差實時變化,利用模糊規則調整PID參數,建立模糊自整定PID控制系統,但該控制系統僅為單回路控制系統,抗擾動能力不夠強。文獻[2-3]將模糊控制與PID控制相結合,建立了模糊PID 串級控制系統,內回路為PID控制器,外回路為模糊控制器。文獻[2]基于非線性歸一模糊量化方法給出了帶修正函數模糊規則自調整的控制方法,由于位置環僅采用模糊控制,系統穩態誤差比較大,從文獻給出的結果圖可以看出階躍響應出現抖動;文獻[3]中內回路僅采用比例控制,外回路采用模糊控制器輸出Kp、Ki、Kd3個參數。由于內回路僅采用比例控制,系統上升時間較長,會產生超調和穩態誤差。
文中針對實驗臺的特點,取實驗臺的一個液壓缸支腿,建立其模糊PID 自適應串級控制模型,內回路(速度環)采用經典的PID控制器,外回路(位置環)采用增量式模糊自適應PID控制器,即利用模糊控制器輸出PID參數變化量ΔKp、ΔKi、。
1 實驗臺液壓缸支腿控制模型

圖1 液壓缸串級控制方框圖
結合文獻[4-6]得到液壓缸串級控制系統的方框圖,如圖1。圖中:ωh為閥控液壓缸系統諧振頻率;ωf為伺服閥諧振頻率;ζh為閥控液壓缸系統阻尼比;ζf為伺服閥阻尼比;Kq為閥控液壓缸系統增益;K為伺服閥增益;Km為擾動外力微分系數;Kn為擾動外力增益;Kpx、Kix、Kdx分別為位置環比例、積分、微分系數;Kpv、Kiv、Kdv分別為速度環比例、積分、微分系數;T為濾波器時間常數。
文中采用對稱伺服閥控制非對稱液壓缸,這種控制方式在液壓缸換向時會產生很大的壓力跳動,使系統產生震動且液壓缸傳遞函數隨活塞桿運動方向變化而變化,使系統會表現出動態不對稱性[6]。
當僅僅采用位置PID控制器時,即將內部速度環去掉,液壓缸輸出位移與擾動力之間的傳遞函數為:

令

當采用串級控制時,液壓缸位移與擾動力之間的傳遞函數為

由于

式(2)化簡后為

結合式(1)、(5)知,兩式分子是相同的,分母式(5)比式(1)多了一項KqKvGc2GfGa/A,而且式(5)的分母第二項比式(1)的分母的第二項大得多。因此,由于內環控制的存在,系統對干擾的抑制能力變強,當其他參數不變時,內環的增益越大系統抑制干擾能力越強。
2 模糊自適應串級控制器設計
文中位置環采用二維模糊控制器,將位置誤差與誤差變化率輸入模糊控制器,通過模糊推理機計算,輸出PID參數的修正量,即ΔKp、ΔKi、ΔKd。
位置環自適應控制器控制算法為:

模糊控制器是系統實現自適應控制的核心,在設計模糊控制器時的主要原則是:當位置誤差較大時,應該增大ΔKp,以提高系統的響應速度,ΔKi取較小值,以減小系統的超調量;當位置誤差較小時,應當減小ΔKp,適當增大ΔKi,以便減小穩態誤差。ΔKd抑制控制量的變化,是對ΔKp、ΔKi的補償。具體的模糊規則如表1[7-8]。

E EC NB NM NS ZO PS PM PB NB PB/NB/PS PB/NB/NS PM/NM/NB PM/NM/NB PS/NS /NB ZO/ZO/NM ZO/ZO/PS NM PB/NB/NS PB/NB/NS PM/NM/NB PS/NS/NM PS/NS/NM ZO/ZO/NS NS/ZO/ZO NS PM/NB/ZO PM/NM/NS PM/NS/NM PS/PS/NM ZO/ZO/NS NS/PS/NS NS/PS/ZO ZO PM/NM/ZO PM/NM/PS PS/NS/NS ZO/ZO/NS NS/PS/NS NM/PM/NS NM/PM/ZO PS PS/NM/ZO PS/NS/ZO ZO/ZO/ZO NS/PS/ZO NS/PS/ZO NM/PM/ZO NM/PB/ZO PM PS/ZO/PB ZO/ZO/NS NS/PS/PS NM/PS/PS NM/PM/PS NM/PB/PS NB/PB/PM PB ZO/ZO/PB ZO/ZO/PM NM/PS/PM NM/PM/PM NM/PM/PS NB/PB/PS NB/PB/PB
3 系統仿真與結果
3.1 仿真模型建立
仿真模型建立AMESim與Simlink仿真模型如圖2和圖3所示。
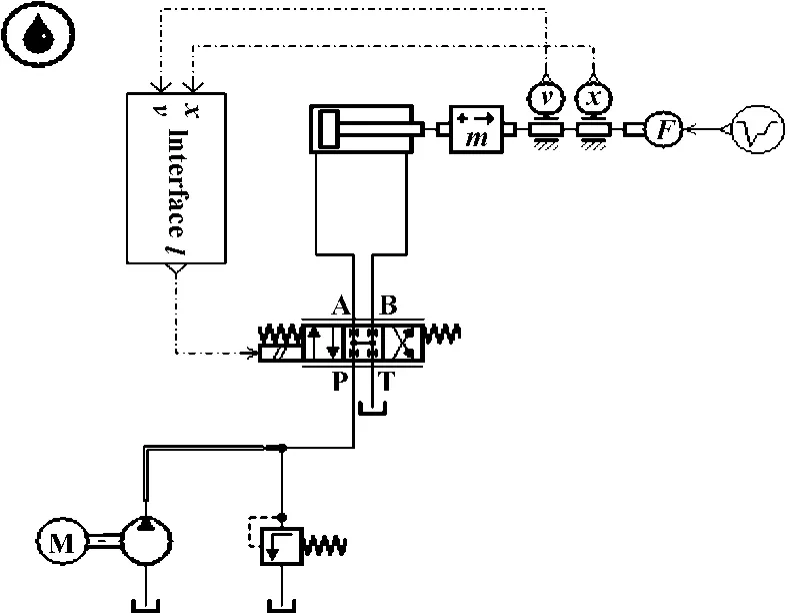
圖2 模糊自適應串級控制液壓系統模型

圖3 模糊自適應串級控制Simulink 控制系統模型
模型的主要參數如下:液壓缸缸徑125 mm,桿徑70 mm,行程0.5 m;溢流閥的壓力設定為25 MPa,伺服閥額定流量54 L/min,額定供油壓力21 MPa;位置參考信號為階躍信號,幅值為0.4 m,干擾力為持續1 s、幅值為100 kN的沖擊力。
在Simulink 中建立如下的聯合仿真模型,控制信號輸入伺服閥前要經過限幅環節和濾波器。速度環的PID參數為Kp=20,Ki=1×10-6,Kd=1×10-3;位置環的PID參數為10-3。
3.2 系統仿真分析
系統參考信號為幅值為0.4 m的階躍信號,在t=7 s時刻突然施加載荷為100 kN的沖擊力,持續時間為1 s,仿真結果如下所示。
模糊自適應串級PID控制和單回路PID控制階躍響應仿真曲線分別見圖4和5。模糊自適應串級PID參數整定曲線見圖6和7。

圖4 模糊自適應串級控制階躍響應曲線

圖5 單回路PID 控制階躍響應曲線

圖6 Kp 整定曲線

圖7 Ki 和Kd 整定曲線
由圖4和圖5可以看出:實驗臺在單回路經典PID控制下,經沖擊力作用后,震動幅度較大且衰減周期較長,而在模糊自適應串級控制下,由于系統的控制參數能夠實時變化使系統的響應速度增快,系統震動幅值可以控制在非常小的范圍之內,且系統可以很快恢復到穩定狀態,并且液壓缸上升速度比單回路經典PID控制下的快。由圖6、圖7看出:在液壓缸上升階段,位置環的Kp不斷增大,Ki不斷減小;在t=7 s 沖擊力作用時,Kp、Ki,Kd不斷自適應調節,以達到快速穩定實驗臺的目的。
4 總結
在控制液壓缸時采用模糊自適應串級控制策略,建立了液壓缸速度環和位置環雙閉環控制模型,速度環采用經典的PID控制器,位置環采用模糊自適應PID控制器,利用模糊控制器在線實時調節PID的參數。仿真結果表明:在沖擊載荷下,模糊自適應串級控制器相較于單回路傳統PID控制器,能有效地減小系統的震蕩時間和震蕩幅度,增強系統魯棒性。
【1】盧紅影,姜繼海,王頔.模糊自適應PID控制控制策略的液壓變壓器驅動直線負載系統研究[J].機床與液壓,2009,37(9):58-61.
【2】丁國鋒,王孫安,林延圻,等.模糊PID 串級控制在電液伺服系統中的應用[J].機床與液壓,1996(2):10-11.
【3】王啟志,王曉霞,王永初.一種自適應模糊串級控制仿真[J].計算機仿真,2003(3):65-67.
【4】劉長年.非對稱伺服油缸的動態研究[J].機床與液壓,1985(1):1-10.
【5】江玲玲,張俊俊.基于AMESim與Matlab/Simulink 聯合仿真技術的接口與應用研究[J].機床與液壓,2008,36(1):148-149.
【6】肖晟,強保民.基于對稱四通閥控非對稱液壓缸的電液比例位置控制系統建模與仿真[J].機床與液壓,2009,37(6):96-97.
【7】馮永寶,常鈺.基于Fuzzy-PID控制的調平支腿精確定位的仿真研究[J].液壓氣動與密封,2011(19):19-22.
【8】凌軒,曹樹平,朱玉泉,等.基于模糊自適應控制的四點支撐液壓平臺自動調平方法[J].機床與液壓,2007,35(12):84-86.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19