圓筒型無鐵心永磁直線電機(jī)空載磁場(chǎng)解析計(jì)算
2013-03-13 01:33:52董劍寧陳艷龍黃允凱
關(guān)鍵詞:磁場(chǎng)
董劍寧 陳艷龍 黃允凱 金 龍
(東南大學(xué)電氣工程學(xué)院,南京210096)
直線電機(jī)無需借助機(jī)械齒輪、滾珠絲杠等轉(zhuǎn)換裝置即可實(shí)現(xiàn)直線運(yùn)動(dòng),具有結(jié)構(gòu)簡(jiǎn)單、動(dòng)態(tài)性能好等優(yōu)點(diǎn),近年來在交通運(yùn)輸、伺服控制、建筑工程、醫(yī)療器械等領(lǐng)域獲得越來越廣泛的應(yīng)用.
高精度伺服應(yīng)用要求永磁直線電機(jī)具有盡可能低的定位力矩和單邊力矩.因此,采用無槽動(dòng)子的圓筒形永磁直線電機(jī)成為此類應(yīng)用的首選.這種電機(jī)定子永磁體分為表貼式和內(nèi)嵌式2 種:前者沿徑向充磁,貼裝在磁軛的表面;后者沿軸向充磁,嵌在鐵心之間[1-2].為進(jìn)一步降低動(dòng)子慣量以提高電機(jī)加速能力,可采用無鐵心動(dòng)子結(jié)構(gòu)[3].此時(shí),為增強(qiáng)主磁場(chǎng),定子一般采用Halbach 陣列結(jié)構(gòu)或內(nèi)嵌式的聚磁結(jié)構(gòu)[4].
文獻(xiàn)[5]提出一種定、動(dòng)子均無鐵心的圓筒型無鐵心永磁直線電機(jī)結(jié)構(gòu).其定子由軸向充磁的圓柱型永磁體組成,相鄰永磁體充磁方向相反,且緊貼在一起,中間無鐵磁性極靴.與普通的定子無鐵心圓筒型直線電機(jī)相比,該電機(jī)對(duì)永磁磁通的利用率更高,對(duì)動(dòng)子偏心的敏感度更低,運(yùn)動(dòng)過程中繞組電感變化更小,因而具有更高的效率和控制精度[6].目前,這種結(jié)構(gòu)的圓筒型無鐵心永磁直線電機(jī)已在納米級(jí)高精度伺服系統(tǒng)中獲得應(yīng)用[7],但國內(nèi)外關(guān)于此種電機(jī)電磁場(chǎng)分析的文獻(xiàn)較少.
為準(zhǔn)確分析直線電機(jī)的電磁場(chǎng)分布,優(yōu)化電機(jī)設(shè)計(jì),國內(nèi)外學(xué)者提出了多種方法.其中最常用的是等效磁路法[8],該方法簡(jiǎn)單易用,但存在模型不準(zhǔn)確的問題,在漏磁較大或磁路復(fù)雜時(shí)尤為嚴(yán)重.采用有限元法[9]可以對(duì)復(fù)雜邊界、多種媒介以及非線性、飽和等問題進(jìn)行有效處理,具有明顯的優(yōu)越性,但前處理和計(jì)算耗時(shí)較長(zhǎng),不適合在電機(jī)優(yōu)化設(shè)計(jì)的迭代計(jì)算中使用,一般用于確定各項(xiàng)尺寸參數(shù)后的電磁性能核算.使用解析法計(jì)算電磁場(chǎng)可以克服上述2 種方法的缺點(diǎn),其特點(diǎn)是計(jì)算時(shí)間短,且不需要復(fù)雜的前處理,能直觀地表述各項(xiàng)參數(shù)對(duì)磁場(chǎng)分布的影響,以便調(diào)整參數(shù)進(jìn)行優(yōu)化設(shè)計(jì).但解析法不能考慮鐵心磁導(dǎo)率的非線性,僅適用于磁路飽和程度低的場(chǎng)合.文獻(xiàn)[1,10-11]均為解析法在直線電機(jī)電磁設(shè)計(jì)中的典型應(yīng)用.
本文所研究的圓筒型無鐵心永磁直線電機(jī)定、動(dòng)子上均無鐵心,磁路線性且具有高度對(duì)稱性,非常適合解析法的應(yīng)用.本文首先在圓柱坐標(biāo)系下采用磁荷模型計(jì)算出單個(gè)圓柱形永磁體的磁場(chǎng)分布,再應(yīng)用疊加原理得到整個(gè)電機(jī)的氣隙磁場(chǎng)分布.之后在空載磁場(chǎng)的基礎(chǔ)上推導(dǎo)出電機(jī)反電勢(shì)和推力表達(dá)式.最后通過有限元軟件對(duì)解析計(jì)算結(jié)果進(jìn)行驗(yàn)證,證明了該解析法的正確性.
1 磁場(chǎng)計(jì)算
1.1 磁荷模型
在無電流的永磁體和空氣區(qū)域,磁感應(yīng)強(qiáng)度矢量B 和磁場(chǎng)強(qiáng)度矢量H 滿足下式:

根據(jù)矢量場(chǎng)的亥姆霍茲定理,存在標(biāo)量φm,使

再將永磁體本構(gòu)關(guān)系B =μ0(H +M)代入式(1)、(2)可得

式中,M 為永磁體的磁化矢量.對(duì)式(3)中的拉普拉斯算子應(yīng)用格林函數(shù),可解得

式中,x 為場(chǎng)點(diǎn)的位置矢量;x′為源點(diǎn)的位置矢量.M 僅存在于永磁區(qū)域內(nèi),因在永磁區(qū)域表面M 突變?yōu)?,式(4)需寫為

式中,v′為永磁區(qū)域;s′為v′的表面;n 為s′外法方向上的單位矢量.參考電荷模型,可假設(shè)在永磁體內(nèi)存在體密度ρm=-▽·M,表面密度σm=M·n的磁荷.由此可推得,空氣中x 處的磁密為[12]

1.2 空載磁場(chǎng)求解
對(duì)于組成圖1中圓筒型無鐵心永磁直線電機(jī)定子的某個(gè)軸向充磁的圓柱形永磁體(見圖2)而言,僅左右兩個(gè)圓形底面上存在密度為M 的磁荷.僅考慮右底面上的磁荷,由其引起的φm為的坐標(biāo),ρ,φ 為場(chǎng)區(qū)點(diǎn)的坐標(biāo).對(duì)使用文獻(xiàn)[13]中的積分變換,可得

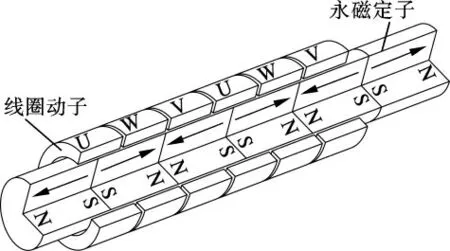
圖1 圓筒型無鐵心永磁直線電機(jī)結(jié)構(gòu)
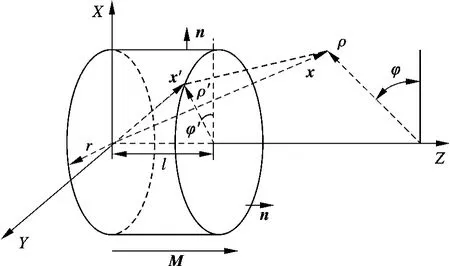
圖2 單個(gè)軸向充磁的圓柱形永磁體模型
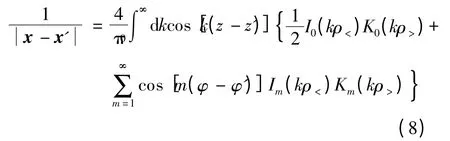
式中,Im,Km分別為第一類和第二類m 階虛宗量的貝塞爾函數(shù);ρ>(ρ<)為ρ 和ρ′中的較大(小)者.由磁場(chǎng)的軸對(duì)稱性知,φm1與φ 無關(guān),為簡(jiǎn)化計(jì)算,可令φ=0.將式(8)代入式(7),有

式中,l 為圓柱形永磁體的長(zhǎng)度.由于其中二重積分的第2 項(xiàng)為0,式(9)可簡(jiǎn)化為

利用虛宗量的貝塞爾函數(shù)的性質(zhì)[14],對(duì)式(10)中的第2 個(gè)積分進(jìn)行處理,可得在ρ >r 的區(qū)域(即空氣)內(nèi),有

對(duì)其求梯度,可得到空氣中磁通密度的徑向和軸向分量分別為

同樣可求出由永磁體的左底面上的磁荷引起的磁密分量為

由于磁路線性,可直接利用疊加原理,得到由n 個(gè)永磁體組成的圓筒型無鐵心永磁直線電機(jī)定子的空載磁密為

2 反電勢(shì)與推力計(jì)算
圓筒型無鐵心永磁直線電機(jī)的動(dòng)子繞組線圈軸對(duì)稱地環(huán)繞在定子外,每相繞組由若干組線圈串/并聯(lián)而成.圖3為動(dòng)子繞組示意圖,其中Rco為線圈的外半徑,Rci為其內(nèi)半徑,wc為每組線圈寬度.

圖3 動(dòng)子繞組示意圖
根據(jù)法拉第電磁感應(yīng)定律,動(dòng)子沿Z 軸作直線運(yùn)動(dòng)時(shí),每根環(huán)形線圈內(nèi)都會(huì)切割徑向磁場(chǎng)感應(yīng)出反電勢(shì).根據(jù)空載磁場(chǎng)計(jì)算結(jié)果推導(dǎo)出每根線圈內(nèi)產(chǎn)生的反電勢(shì),再將同相線圈的反電勢(shì)相加即可得到相反電勢(shì).但這樣計(jì)算過程復(fù)雜,耗時(shí)長(zhǎng).為簡(jiǎn)化計(jì)算,可假設(shè)所有線圈均集中在平均半徑處.如圖3所示,設(shè)某組線圈軸線所在位置為z,則該組線圈區(qū)域內(nèi)的徑向磁密平均值為

該組線圈在該位置時(shí)的反電勢(shì)為

式中,v 為動(dòng)子運(yùn)動(dòng)速度;Nc為該組線圈的串聯(lián)匝數(shù);Lav為每匝線圈的平均長(zhǎng)度.將同相的每組線圈中的反電勢(shì)相加,即可得到每相繞組反電勢(shì)波形.
動(dòng)子上的推力是由電樞電流與空載磁場(chǎng)相互作用而產(chǎn)生的洛侖茲力.同樣認(rèn)為線圈集中在平均磁密處,可得一組線圈的推力為

將所有線圈組上的推力相加,即可得到總的動(dòng)子推力.
3 結(jié)果對(duì)比與分析
使用以上解析模型分析了某型號(hào)圓筒型無鐵心永磁直線電機(jī),計(jì)算了其空載磁場(chǎng)、反電勢(shì)和動(dòng)子推力.該型號(hào)電機(jī)的主要參數(shù)如表1所示.
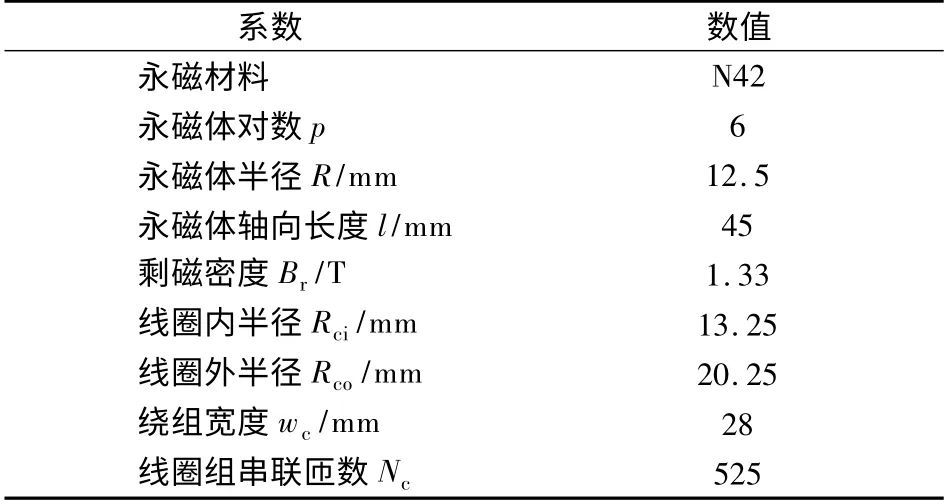
表1 某型號(hào)圓筒形無鐵心永磁直線電機(jī)主要參數(shù)
為驗(yàn)證以上解析計(jì)算方法的正確性,建立了該電機(jī)的二維軸對(duì)稱有限元模型,圖4給出了有限元法計(jì)算出的空載磁場(chǎng)分布結(jié)果.和徑向分量的有限元法和解析法計(jì)算結(jié)果.可看出隨著軸向距離的增加,空載磁密呈周期性變化.受邊端效應(yīng)影響,邊緣處磁密快速下降.解析法相對(duì)于有限元法的最大偏差出現(xiàn)在徑向磁密最大的位置,但此時(shí)誤差也在5%以內(nèi).出現(xiàn)偏差的主要原因是最大磁密處對(duì)應(yīng)的實(shí)際磁化強(qiáng)度要低于解析模型中使用的剩余磁化強(qiáng)度.

圖4 圓筒形無鐵心永磁直線電機(jī)的磁場(chǎng)分布

圖5 ρ=13 mm 處解析法與有限元法磁密計(jì)算結(jié)果對(duì)比
圖6給出了2 種方法計(jì)算出的動(dòng)子以1 m/s速度沿軸向運(yùn)動(dòng)時(shí)U 相繞組中的反電勢(shì)波形,可見2 種計(jì)算方法所得結(jié)果非常接近,最大誤差為7%.二者存在偏差的原因除磁化強(qiáng)度的偏差外還有解析模型中對(duì)線圈所作的平均化處理.

圖6 動(dòng)子運(yùn)動(dòng)速度為1 m/s 時(shí)U 相繞組的反電勢(shì)
在繞組中通入有效值為1.3 A 的三相對(duì)稱電流,并使電流位于q 軸上,得到如圖7所示的動(dòng)子推力曲線.由圖可知,解析法與有限元法計(jì)算出的推力波形接近.解析法所得推力平均值為77.8 N,有限元法結(jié)果為79.0 N,兩者偏差小于2%.

圖7 一個(gè)電周期內(nèi)動(dòng)子受力曲線
圖8對(duì)比了負(fù)載狀態(tài)下,ρ=13 mm 處,A 相線圈電流達(dá)到幅值時(shí)對(duì)應(yīng)極面下的磁密波形以及相同位置的空載磁密波形.2 種波形均由有限元分析得到.由圖可見,2 種波形非常接近,這說明負(fù)載電流對(duì)電機(jī)磁場(chǎng)的影響非常小,這也是該種電機(jī)的優(yōu)點(diǎn)之一.
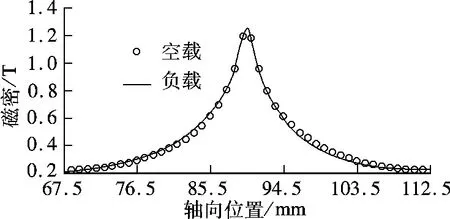
圖8 空載與負(fù)載時(shí)一個(gè)極面下的磁密波形
4 結(jié)語
本文應(yīng)用磁荷法在圓柱坐標(biāo)系下導(dǎo)出了圓筒型無鐵心永磁直線電機(jī)的空載磁場(chǎng)解析計(jì)算模型,給出了空載磁場(chǎng)軸向和徑向分量的解析公式.在此基礎(chǔ)上,對(duì)線圈區(qū)域進(jìn)行平均化處理,求出電機(jī)相反電勢(shì)和推力的解析公式.之后利用此解析方法分析了某型號(hào)圓筒型無鐵心永磁直線電機(jī),所得結(jié)果與有限元法所得結(jié)果進(jìn)行了對(duì)比,驗(yàn)證了解析法的正確性.本文所提出的解析計(jì)算方法適用于該種電機(jī)的電磁設(shè)計(jì),對(duì)于其他永磁直線電機(jī)的理論分析也有參考價(jià)值.
References)
[1]趙鏡紅,張曉峰,張俊洪.圓筒永磁直線同步電機(jī)磁場(chǎng)和推力分析[J].電機(jī)與控制學(xué)報(bào),2010,14(1):12-17.
Zhao Jinghong,Zhang Xiaofeng,Zhang Junhong.Field and thrust analysis of tubular permanent magnet linear synchronous motor[J].Electrical Machines and Control,2010,14(1):12-17.(in Chinese)
[2]王詠菲.圓筒型永磁直線同步電機(jī)的電磁場(chǎng)分析與研究[D].天津:天津大學(xué)電氣與自動(dòng)化工程學(xué)院,2008.
[3]劉曉.空心式永磁直線伺服電機(jī)及其驅(qū)動(dòng)控制系統(tǒng)研究[D].杭州:浙江大學(xué)電氣工程學(xué)院,2008.
[4]Trumper D,Kim W,Williams M.Design and analysis framework for linear permanent magnet machines[J].IEEE Transactions on Industry Applications,1996,32(2):371-379.
[5]Ishiyama N.Linear motor equipped with a stator which is easily assembled:US,6040642[P].2000.
[6]Suzuki A,Yoshida T.Position detection for shaft-type linear motor by measurement of shaft surface magnetic flux[C]//Proceedings of International Conference on Electrical Machines and Systems.Tokyo,Japan,2009:5382917-01-06.
[7]Nippon Pulse Ltd.Linear shaft motor—nippon pulse[EB/OL].(2011-08-09)[2012-09-06].http://www.nipponpulse.com.
[8]Mizuno T,Yamada H.Magnetic circuit analysis of a linear synchronous motor with permanent magnets[J].IEEE Transactions on Magnetics,1992,28(5):3027-3029.
[9]Tomczuk B,Schroder G,Waindok A.Finite-element analysis of magnetic field and electromechanical parameters calculation for a slotted permanent-magnet tubular linear motor[J].IEEE Transactions on Magnetics,2007,43(7):3229-3236.
[10]Wang J,Howe D,Jewell G.Analysis and design optimization of an improved axially magnetized tubular permanent-magnet machine[J].IEEE Transactions on Energy Conversion,2004,19(2):289-295.
[11]王淑紅,熊光煜.新型筒型永磁動(dòng)圈式直線電動(dòng)機(jī)氣隙磁場(chǎng)解析分析[J].電工技術(shù)學(xué)報(bào),2007,22(5):41-46.
Wang Shuhong,Xiong Guangyu.Analysis of air gap field in a new tubular linear PM motor with moving coil[J].Transactions of China Electrotechnical Society,2007,22(5):41-46.(in Chinese)
[12]Furlani E.Permanent magnet and electromechanical devices[M].New York:Academic Press,2001.
[13]胡嗣柱,倪光炯.數(shù)學(xué)物理方法[M].上海:復(fù)旦大學(xué)出版社,1989.
[14]Olver F,Lozier D,Boisvert R,et al.NIST handbook of mathematical functions[M].New York:Cambridge University Press,2010.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
數(shù)學(xué)物理學(xué)報(bào)(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2017年3期)2017-05-04 07:15:09
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:23