汽車驅(qū)動(dòng)橋疲勞試驗(yàn)控制系統(tǒng)研究
2013-03-09 08:14:48
(武漢理工大學(xué)物流工程學(xué)院 武漢 430063)
0 引 言
隨著我國(guó)汽車工業(yè)的快速發(fā)展,汽車零部件性能測(cè)試得到越來(lái)越廣泛的重視.汽車驅(qū)動(dòng)橋是汽車的重要?jiǎng)恿鬟f部件,對(duì)汽車的使用壽命和安全性具有重要的影響.為了確保汽車的安全性和可靠性,提高汽車的使用壽命,汽車生產(chǎn)商一般都需要對(duì)每一批驅(qū)動(dòng)橋進(jìn)行整體性能測(cè)試,以獲得驅(qū)動(dòng)橋的性能參數(shù).為此,許多驅(qū)動(dòng)橋生產(chǎn)商都希望建立了自己的驅(qū)動(dòng)橋性能測(cè)試試驗(yàn)臺(tái).在汽車零部件生產(chǎn)中,為了獲得汽車零部件的性能參數(shù),需要建立汽車零部件的性能測(cè)試平臺(tái),而現(xiàn)有的一些汽車測(cè)試平臺(tái)大多采用手動(dòng)控制方式.迫切需要一個(gè)自動(dòng)化的控制系統(tǒng),能夠自動(dòng)獲得所需要的反映汽車零部件是否合格的性能參數(shù).
本文針對(duì)汽車驅(qū)動(dòng)橋性能測(cè)試的需求,將傳感器技術(shù)、自動(dòng)控制技術(shù)運(yùn)動(dòng)到此控制系統(tǒng)中,建立了基于工控機(jī)的驅(qū)動(dòng)橋性能測(cè)試控制系統(tǒng),實(shí)現(xiàn)了對(duì)驅(qū)動(dòng)橋加載轉(zhuǎn)矩和轉(zhuǎn)速等參數(shù)的控制,從而解決的企業(yè)對(duì)產(chǎn)品合格的檢驗(yàn),獲得了良好的應(yīng)用效果.本文所設(shè)計(jì)的測(cè)試系統(tǒng)的特點(diǎn)有:參數(shù)設(shè)置(包括驅(qū)動(dòng)橋的型號(hào),額定轉(zhuǎn)速,最高溫度等參數(shù)的設(shè)定)、動(dòng)態(tài)顯示、保存測(cè)試數(shù)據(jù)、自動(dòng)跟蹤調(diào)整試驗(yàn)速度和載荷、打印等特點(diǎn).
1 汽車驅(qū)動(dòng)橋系統(tǒng)硬件組成
1.1 汽車驅(qū)動(dòng)橋的功能
汽車驅(qū)動(dòng)橋處于動(dòng)力傳動(dòng)系的末端,其基本功能是增大由傳動(dòng)軸或變速器傳來(lái)的轉(zhuǎn)矩,并將動(dòng)力合理的分配給左、右驅(qū)動(dòng)輪,另外還承受作用于路面和車架或車身之間的垂直立、縱向力和橫向力.驅(qū)動(dòng)橋一般由主減速器、差速器、車輪傳動(dòng)裝置和驅(qū)動(dòng)橋殼等組成[1].汽車驅(qū)動(dòng)橋組成示意圖見(jiàn)圖1.
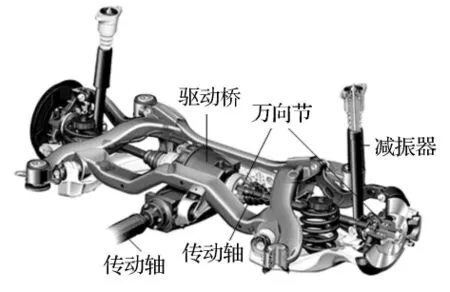
圖1 汽車驅(qū)動(dòng)橋結(jié)構(gòu)示意圖
1.2 控制系統(tǒng)的輸入輸出設(shè)備
控制系統(tǒng)的硬件構(gòu)成包括:工控機(jī),多功能I/O卡,輸入操作按鈕類操作裝置,轉(zhuǎn)矩、速度、溫度信號(hào)采集輸入傳感器,輸出狀態(tài)顯示裝置以及驅(qū)動(dòng)電機(jī)工作的繼電器(圖中沒(méi)有表示)等.整個(gè)測(cè)試控制系統(tǒng)硬件架構(gòu)見(jiàn)圖2.
控制系統(tǒng)主機(jī)選用平板式工控機(jī),此類主機(jī)具有良好的軟硬件開(kāi)放性,功能強(qiáng)大,性能可靠,能滿足各種軟件平臺(tái)下控制系統(tǒng)的開(kāi)發(fā)需求.
多功能I/O卡是實(shí)現(xiàn)開(kāi)關(guān)量與模擬量信號(hào)輸入/輸出的重要通道,一般可選用性能可靠,輸入/輸出通道數(shù)滿足控制系統(tǒng)要求,價(jià)格適中的多功能I/O卡[2].
控制系統(tǒng)的輸入信號(hào)包括:操作按鈕信號(hào),電器響應(yīng)反饋信號(hào),轉(zhuǎn)矩/速度傳感器信號(hào),溫度傳感器信號(hào)等.輸入信號(hào)通過(guò)多功能I/O卡輸入到工控機(jī)中,控制系統(tǒng)根據(jù)這些信號(hào)進(jìn)行響應(yīng)操作,完成試驗(yàn)過(guò)程.
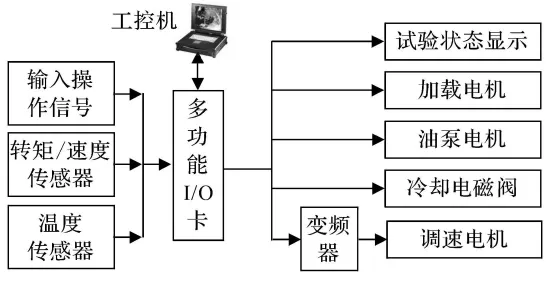
圖2 驅(qū)動(dòng)橋性能測(cè)試控制系統(tǒng)硬件構(gòu)成示意圖
控制系統(tǒng)的輸出信號(hào)包括:試驗(yàn)狀態(tài)信號(hào),加載電機(jī)、調(diào)速電機(jī)的啟停信號(hào),冷卻電磁閥的啟停信號(hào)等.這些信號(hào)由控制系統(tǒng)發(fā)出,通過(guò)多功能I/O卡輸出到控制繼電器或開(kāi)關(guān)等,實(shí)現(xiàn)對(duì)電機(jī)的控制和狀態(tài)的顯示功能.
2 驅(qū)動(dòng)橋疲勞試驗(yàn)軟件系統(tǒng)設(shè)計(jì)
2.1 軟件功能
根據(jù)驅(qū)動(dòng)橋試驗(yàn)系統(tǒng)需求,設(shè)計(jì)系統(tǒng)控制軟件功能見(jiàn)圖3.
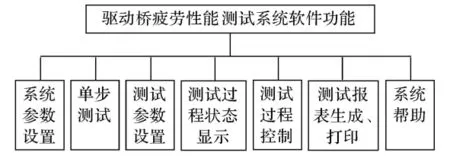
圖3 系統(tǒng)軟件功能構(gòu)成
1)系統(tǒng)參數(shù)設(shè)置功能 此功能模塊實(shí)現(xiàn)系統(tǒng)參數(shù)的設(shè)置,如加載系統(tǒng)的傳動(dòng)比,試驗(yàn)系統(tǒng)所能達(dá)到的最大轉(zhuǎn)矩,試驗(yàn)臺(tái)架安裝模式等,這些參數(shù)保存在系統(tǒng)數(shù)據(jù)庫(kù)中,供試驗(yàn)時(shí)選用.
2)單步調(diào)試功能 此功能實(shí)現(xiàn)單一的調(diào)試功能,如調(diào)速電機(jī)的啟動(dòng)、調(diào)速、停止控制,加載電機(jī)的正向加載、反向加載控制,轉(zhuǎn)矩、速度數(shù)據(jù)的采集檢測(cè),急停按鈕的測(cè)試等.方便用戶對(duì)試驗(yàn)臺(tái)架的調(diào)試.
3)測(cè)試參數(shù)設(shè)置功能 此功能實(shí)現(xiàn)具體測(cè)試項(xiàng)目參數(shù)的設(shè)置,如疲勞試驗(yàn)各階段磨合次數(shù),各階段轉(zhuǎn)矩系數(shù),磨合試驗(yàn)轉(zhuǎn)矩等.
4)測(cè)試過(guò)程狀態(tài)顯示功能 此功能實(shí)現(xiàn)測(cè)試過(guò)程狀態(tài)的顯示.磨合過(guò)程的轉(zhuǎn)矩以動(dòng)態(tài)曲線方式顯示,并設(shè)置最大最小控制轉(zhuǎn)矩,極限磨合轉(zhuǎn)矩4條直線,可以直接觀察實(shí)測(cè)轉(zhuǎn)矩的變化,并能直接觀察到實(shí)測(cè)轉(zhuǎn)矩是否超過(guò)設(shè)定的最大最小界限.當(dāng)實(shí)測(cè)轉(zhuǎn)矩超過(guò)設(shè)定值時(shí),控制系統(tǒng)將提示警示信息,并根據(jù)轉(zhuǎn)矩的大下啟動(dòng)加載電機(jī)自動(dòng)調(diào)節(jié)轉(zhuǎn)矩,確保試驗(yàn)在規(guī)定的條件下進(jìn)行.
5)測(cè)試過(guò)程控制功能 此功能自動(dòng)實(shí)現(xiàn)對(duì)試驗(yàn)過(guò)程的控制.
6)測(cè)試報(bào)表生成、打印功能 試驗(yàn)結(jié)束后,系統(tǒng)自動(dòng)調(diào)用測(cè)試報(bào)表生成功能,完成試驗(yàn)報(bào)告的顯示、打印任務(wù).
7)系統(tǒng)幫助功能 此功能提供對(duì)系統(tǒng)具體操作的幫助信息,方便操作者使用.
8)除以上功能外,系統(tǒng)還提供了用戶權(quán)限和密碼設(shè)置功能,確保系統(tǒng)使用安全.
2.2 控制算法設(shè)計(jì)
驅(qū)動(dòng)橋疲勞磨合試驗(yàn)是一個(gè)復(fù)雜的過(guò)程,包含4次磨合試驗(yàn),1次正式試驗(yàn),每1次磨合試驗(yàn)都有2萬(wàn)~3萬(wàn)次,正式試驗(yàn)則在5萬(wàn)次以上.試驗(yàn)過(guò)程中轉(zhuǎn)矩要根據(jù)磨合次數(shù)逐步增大,而試驗(yàn)速度、試驗(yàn)溫度都要控制在給定值范圍內(nèi).因此,需要設(shè)計(jì)合理的控制策略和控制算法,保證試驗(yàn)按要求穩(wěn)定運(yùn)行[3-7].
2.2.1 啟動(dòng)過(guò)程控制 試驗(yàn)啟動(dòng)過(guò)程由一系列控制動(dòng)作完成,其中又包括了傳感器數(shù)據(jù)的檢測(cè),調(diào)速電機(jī),加載電機(jī)的控制過(guò)程,試驗(yàn)啟動(dòng)基本流程見(jiàn)圖4.
2.2.2 速度調(diào)節(jié)控制算法 驅(qū)動(dòng)橋性能測(cè)試系統(tǒng)從啟動(dòng)到穩(wěn)定運(yùn)行再到停止,需要按照試驗(yàn)要求實(shí)現(xiàn)調(diào)速電機(jī)的控制,為此,特設(shè)計(jì)按圖5所示的速度控制規(guī)律曲線來(lái)進(jìn)行調(diào)速電機(jī)的控制.
由圖5可見(jiàn),AB段為調(diào)速電機(jī)啟動(dòng)階段,變頻器輸出頻率均勻增加,調(diào)速電機(jī)的速度隨之勻速增加;BC段為速度平穩(wěn)運(yùn)行階段,此階段調(diào)速電機(jī)穩(wěn)定運(yùn)行,保證試驗(yàn)按要求進(jìn)行.CD段為調(diào)速電機(jī)停機(jī)階段,速度均勻降低.
根據(jù)圖5的速度控制規(guī)律,設(shè)計(jì)得到調(diào)速電機(jī)控制算法,整個(gè)控制流程由3個(gè)函數(shù)實(shí)現(xiàn).
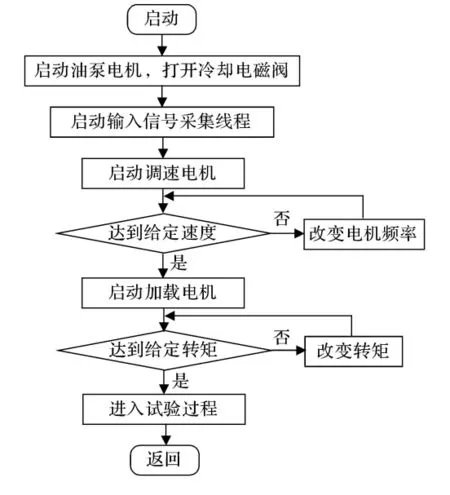
圖4 試驗(yàn)啟動(dòng)過(guò)程算法流程
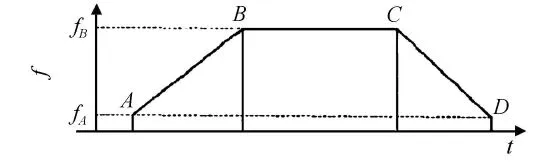
圖5 速度控制規(guī)律
1)啟動(dòng)調(diào)速電機(jī)函數(shù)
Begin
根據(jù)調(diào)速電機(jī)的轉(zhuǎn)向接通正轉(zhuǎn)或反轉(zhuǎn)啟動(dòng)繼電器;
給定變頻器頻率調(diào)整參數(shù);
啟動(dòng)變頻器啟動(dòng)觸點(diǎn)(啟動(dòng)調(diào)速電機(jī));
End
2)動(dòng)態(tài)調(diào)整調(diào)速電機(jī)參數(shù)的函數(shù)
Begin
If檢測(cè)得到的調(diào)速電機(jī)速度判斷是否已經(jīng)滿足速度要求;
Then停止改變電機(jī)頻率;
給出停止調(diào)速標(biāo)志;
Else繼續(xù)按給定參數(shù)改變電機(jī)頻率;
End
3)停止調(diào)速電機(jī)函數(shù)
Begin
按停車要求給定變頻器頻率調(diào)整參數(shù);
調(diào)用動(dòng)態(tài)調(diào)整調(diào)速電機(jī)參數(shù)的函數(shù);End
2.2.3 轉(zhuǎn)矩調(diào)節(jié)控制算法 根據(jù)驅(qū)動(dòng)橋疲勞試驗(yàn)規(guī)范,驅(qū)動(dòng)橋疲勞性能測(cè)試過(guò)程一般分3次磨合試驗(yàn)和1次正式試驗(yàn),在磨合試驗(yàn)階段,試驗(yàn)轉(zhuǎn)矩分別為:第1次為0.25Te,第2次0.5Te,第3次0.75Te.正式試驗(yàn)設(shè)定轉(zhuǎn)矩為T(mén)e.
顯然,試驗(yàn)過(guò)程中,試驗(yàn)轉(zhuǎn)矩需要根據(jù)試驗(yàn)階段進(jìn)行調(diào)整.試驗(yàn)轉(zhuǎn)矩的調(diào)整分兩種情況:(1)跨階段的調(diào)整,即某個(gè)階段結(jié)束后進(jìn)入下一階段的轉(zhuǎn)矩調(diào)整.這種調(diào)整幅度比較大,持續(xù)時(shí)間相對(duì)要長(zhǎng)一些.調(diào)整時(shí),加載電機(jī)持續(xù)加載,直到到達(dá)給定的轉(zhuǎn)矩值,加載電機(jī)停止加載,加載過(guò)程完成;(2)試驗(yàn)階段中的調(diào)整.由于驅(qū)動(dòng)橋的磨合作用,加上機(jī)械系統(tǒng)的間隙等原因,試驗(yàn)過(guò)程中轉(zhuǎn)矩有可能逐漸減小,如果試驗(yàn)轉(zhuǎn)矩小于設(shè)定的范圍,則需要對(duì)試驗(yàn)轉(zhuǎn)矩進(jìn)行調(diào)整,調(diào)整算法見(jiàn)圖6.
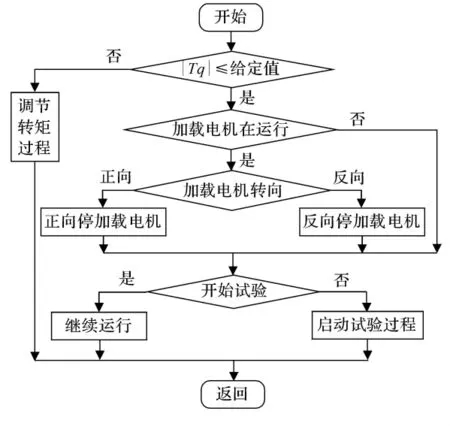
圖6 轉(zhuǎn)矩調(diào)整算法
3 系統(tǒng)運(yùn)行示例
3.1 設(shè)置的參數(shù)
當(dāng)進(jìn)入本系統(tǒng)后選擇所要進(jìn)行測(cè)試的驅(qū)動(dòng)橋型號(hào),例如選擇型號(hào)為2402B11-410-6.33的驅(qū)動(dòng)橋,然后進(jìn)入如圖7所示的參數(shù)設(shè)置,填寫(xiě)完整試驗(yàn)參數(shù)后,點(diǎn)“確定”,就可以進(jìn)入測(cè)試子窗口.

圖7 汽車驅(qū)動(dòng)橋試驗(yàn)參數(shù)設(shè)置
3.2 試驗(yàn)過(guò)程
當(dāng)完成了參數(shù)設(shè)置后,進(jìn)入試驗(yàn)界面可得到如圖8所示的實(shí)時(shí)轉(zhuǎn)矩動(dòng)態(tài)數(shù)據(jù)曲線,實(shí)時(shí)溫度、轉(zhuǎn)速、試驗(yàn)次數(shù)顯示窗口.該子窗口中數(shù)據(jù)曲線及縱向格線每隔時(shí)間段就同時(shí)自右向左移動(dòng)一個(gè)單位,動(dòng)態(tài)顯示效果很好.圖中狀態(tài)是從第二次磨合進(jìn)入第三次磨合的實(shí)時(shí)情況,可以很直觀的看出當(dāng)前變頻電機(jī)的轉(zhuǎn)向和加載電機(jī)的加載方向.如果有報(bào)警,則軟報(bào)警和應(yīng)報(bào)警都會(huì)點(diǎn)亮來(lái)提示操作工人.
在試驗(yàn)進(jìn)行的過(guò)程中,遇到試驗(yàn)次數(shù)到達(dá)10萬(wàn)次左右時(shí),驅(qū)動(dòng)橋出現(xiàn)轉(zhuǎn)矩加載不上去的情況,這說(shuō)明驅(qū)動(dòng)橋的齒輪出現(xiàn)了斷齒,造成轉(zhuǎn)矩?zé)o法繼續(xù)加載.但10萬(wàn)次達(dá)到了國(guó)家對(duì)于驅(qū)動(dòng)橋質(zhì)量標(biāo)準(zhǔn),由此可以檢驗(yàn)驅(qū)動(dòng)橋是否合格.
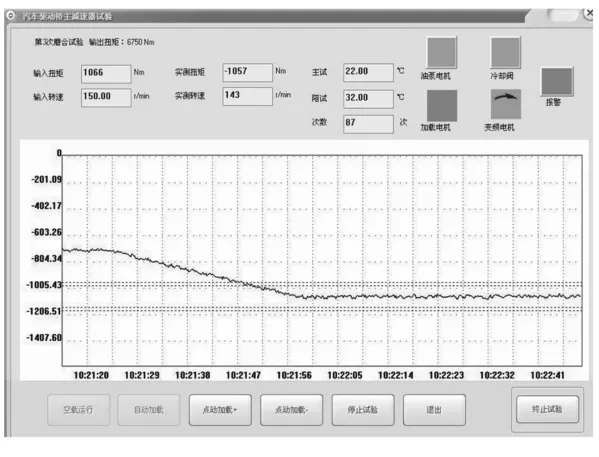
圖8 試驗(yàn)實(shí)例狀態(tài)顯示界面
根據(jù)上述原理設(shè)計(jì)的驅(qū)動(dòng)橋疲勞性能測(cè)試系統(tǒng)已經(jīng)投入運(yùn)行,一年多來(lái)多次試驗(yàn)結(jié)果表明系統(tǒng)運(yùn)行穩(wěn)定,運(yùn)行結(jié)論可靠,完全滿足驅(qū)動(dòng)橋疲勞性能測(cè)試規(guī)范與技術(shù)要求,正在取得預(yù)期的效益.
至此,整個(gè)控制系統(tǒng)的主要部分都介紹完畢,此系統(tǒng)在工業(yè)現(xiàn)場(chǎng)控制中,很好的滿足了企業(yè)的要求,系統(tǒng)在運(yùn)行的過(guò)程中,基本正常.
4 結(jié)束語(yǔ)
本文講述了在驅(qū)動(dòng)橋疲勞試驗(yàn)控制系統(tǒng)中對(duì)于電機(jī)控制所要用到硬件設(shè)備和軟件實(shí)現(xiàn)方法.其中所用的一些工業(yè)控制的思想方法,具有一定使用價(jià)值,可以用在很多工業(yè)控制領(lǐng)域.
[1]陳家瑞.汽車構(gòu)造[M].北京:機(jī)械工業(yè)出版社,2001.
[2]馮 瑞,趙秀栩,羅元月.汽車變速器試驗(yàn)臺(tái)自動(dòng)控制系統(tǒng)的開(kāi)發(fā)[J].武漢理工大學(xué)學(xué)報(bào):信息與管理工程版,2006,28(4):1-4.
[3]SHEPHERD G,WINGO S.深入解析 MFC[M].趙劍云,卿 瑾,譯.北京:中國(guó)電力出版社,2003.
[4]李國(guó)強(qiáng),劉峻巖,任雙瑛.工程裝備底盤(pán)傳動(dòng)部件試驗(yàn)臺(tái)集成研制[J].工程機(jī)械,2010(7):55-58.
[5]桑 楠.汽車自動(dòng)變速器實(shí)物仿真試驗(yàn)臺(tái)的設(shè)計(jì)[J].長(zhǎng)春工業(yè)大學(xué)學(xué)報(bào):自然科學(xué)版,2008(6):102-105.
[6]王皖君,張為公,楊 帆,等.變速器試驗(yàn)臺(tái)測(cè)控系統(tǒng)設(shè)計(jì)[J].測(cè)控技術(shù),2011(9):87-90.
[7]臧懷泉,劉巍波,王智勇.電封閉式汽車變速器加載試驗(yàn)臺(tái)控制系統(tǒng)的設(shè)計(jì)[J].北京工業(yè)大學(xué)學(xué)報(bào),2010(6):56-59.
猜你喜歡
中華詩(shī)詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
中國(guó)科技論壇(2017年7期)2017-07-25 08:49:53
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
決策探索(2014年21期)2014-11-25 12:29:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
