船舶動力定位仿真系統設計
2013-03-08 06:42:30陳紅衛
艦船科學技術 2013年5期
吳 楠,陳紅衛
(江蘇科技大學電子信息工程學院,江蘇鎮江 212003)
船舶動力定位仿真系統設計
吳 楠,陳紅衛
(江蘇科技大學電子信息工程學院,江蘇鎮江 212003)
為滿足船舶動力定位系統研發、維護、操作培訓等需要,在了解國內外動力定位仿真系統的基礎上,設計動力定位仿真系統。研究動力定位系統的功能、組成、人機界面、仿真流程等問題。從模塊模型函數標準、模型組件生成等方面設計仿真系統接口,并采用VB與Matlab混合編程實現接口功能,增強仿真系統的可擴展性和重用性。系統在預警處理、故障診斷方面等有待完善。
動力定位;仿真系統;接口編程;人機界面
0 引言
隨著海洋開發逐漸由淺水向深水發展,船舶動力定位系統的應用將會不斷增多,研究動力定位系統具有現實意義。在船舶動力定位系統研發中,若完成依靠實船試驗,則不僅會耗費大量人力物力財力,而且由于深海區域作業環境較大的不確定性和高危險性會給試驗帶來較大難度,因此,研究動力定位系統需要一個好的仿真調試平臺。希望此仿真平臺能夠模擬作業環境和動力定位系統中各模塊的功能,這樣不僅可以節省試驗成本,而且更能研制出高可靠性和高性能的動力定位系統。此外,動力定位仿真系統在操作人員培訓、設備維護等方面也具有很好的作用。現有的國外動力定位仿真系統,如NAVISNavDP4000 Trainer有很好的操作示例,但技術封鎖決定了其封閉性,自行設計的動力定位控制器、推力分配算法等無法利用它進行試驗。在此基礎上,設計動力定位仿真系統,以彌補國外系統可擴展性和重用性的缺點。
1 動力定位系統
1.1 動力定位描述
動力定位系統是一種閉環控制系統,包括動力系統、推進系統和動力定位控制系統。它通過檢測船舶的實際位置與目標位置的偏差,再結合當時風、浪、流等外界干擾力對船舶的影響,控制器計算出使船舶恢復到目標位置所需推力,由推力分配完成船舶上各推力器的推力,各推力器產生相應的推力使船舶盡可能地保持固定位置或預設航跡上。動力定位系統的突出優點有:適用水深廣;定位成本不隨著水深的增加而增加;定位精度高;機動性能好。它采用定點 (DP)控制和航行 (DT)控制2種控制狀態。DP模式是船舶依靠自身推進器產生的力和力矩來抵消外界擾動力以達到定點定位的目的,這是本文的主要研究模式。DT模式是指軌跡跟蹤模式,即船舶根據設定好的路線航行。
1.2 動力定位系統組成
動力定位系統[1]組成如圖1所示,其中控制器和推力分配算法直接影響定位系統的性能。
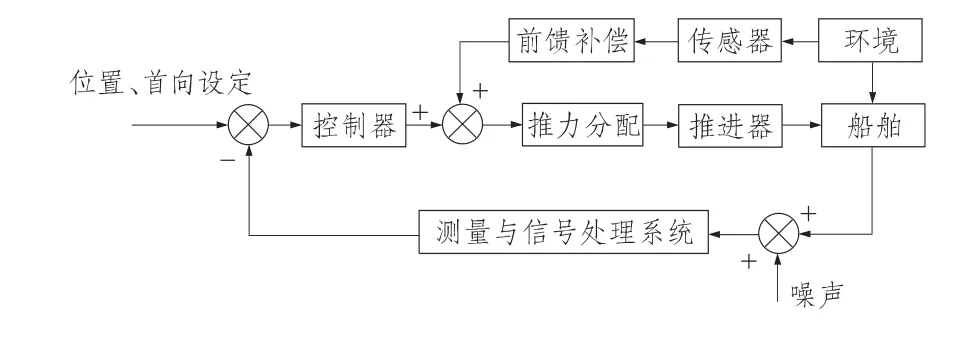
圖1 動力定位系統組成Fig.1 Composition of dynamic positioning system
2 仿真系統
2.1 仿真系統組成
根據動力定位系統的組成,抽象出仿真系統的組成如圖2所示,圖中采用數學模型代替實際系統中的功能模塊。

圖2 動力定位仿真系統組成Fig.2 Composition of dynamic positioning simulatiion system
2.2 仿真系統功能
設計完成的仿真系統能夠實現以下功能:
1)一般仿真功能。這是仿真系統的基本功能,這項功能可以滿足動力定位系統操作培訓需求。主要功能包括參數設置、切換操作模式、下達控制命令、仿真船舶動力定位過程、顯示船舶實時姿態、顯示歷史曲線、處理報警信息以及生成報表等。
2)控制器、動力分配算法試驗功能。這是仿真系統的高級功能,這項功能可以滿足動力定位系統控制器、動力分配算法研發需求。設計的基本思想是:①仿真系統中的各部分模型做到可以應用進口設備已有的模型,或是實際應用中已經驗證的模型;②仿真系統設計中預留必要的接口,做到可以替換其中任何模塊;③仿真系統可以進行模塊組合,如試驗時可以選用除試驗部分外其余均用確定模型的組合;④可以反復調試,取得最佳效果,達到研制目的。
3)環境、推進器以及對象模型試驗功能。這是仿真系統的高級功能,這項功能可以滿足動力定位系統模型驗證需求。設計思想同2)。
4)故障模擬定位功能。這是仿真系統的高級功能,這項功能可以滿足現有進口動力定位系統的故障維修訓練需求。
2.3 仿真系統人機界面設計
人機界面 (又稱用戶界面或使用者界面)是系統和用戶之間進行交互和信息交換的媒介,實現了信息的內部形式與人類可以接受形式之間的轉換。因此,人機界面是仿真系統中非常重要的方面,設計時既要保證界面美觀大方又要符合操作人員的操作習慣。通過人機界面操作人員能夠對動力定位仿真系統進行各種操作,也能直觀得到動力定位的效果。圖3是動力定位仿真系統中環境設置的界面。

圖3 人機界面示例Fig.3 Example ofman-machine interface
3 仿真系統數學模型
3.1 船舶運動數學模型
水面船舶動力定位只涉及到3個自由度的運動,即縱蕩運動、橫蕩運動和首搖運動。船舶的運動方程以MMG模型為基礎[2],建立縱蕩、橫蕩和首搖的運動方程如下式。
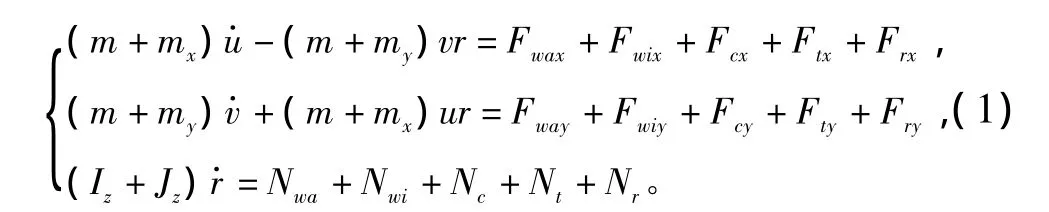
式中:m為船舶質量;mx和my分別為X和Y方向上的附加質量;Jz為繞Z軸方向的附加轉動慣量;下標為wi,wa,c,t,r的F/N分別表示風力、浪力、海流力、推力和舵力及力矩;u為縱蕩速度;v為橫蕩速度;r為首搖角速度。附加質量和附加轉動慣量可根據元良誠三圖譜進行多元回歸分析得到[3]。
3.2 環境數學模型
船舶環境主要考慮風、浪、流的影響[4],風力對船舶的作用力如下式:
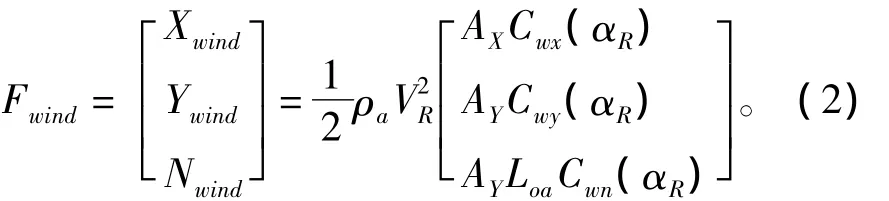
式中:ρa為空氣密度;AX為平臺水線上的正投影面積;AY為水線上的側投影面積;Loa為平臺的總長;VR為平臺受到的相對風速;Cwx(αR),Cwy(αR)和Cwn(αR)分別為x,y方向的風阻力系數及繞z軸的風阻力矩系數,可以通過Isherwood[5]公式求得。
海浪的作用力采用Daidola[6]提出的波浪漂移力和力矩的計算公式,如下:
式中:ρ為海水密度,a為平均波浪幅值;χ為波浪遭遇角;λ為波浪波長;CWaX(λ),CWaY(λ)和CNWa(λ)分別為x和y方向上的波浪漂移力系數以及繞z方向上的波浪漂移力矩系數。
海流的作用力可由以下經驗公式[7]得到:
式中:ρ為海水密度;Asw為水線以下船舶側投影面積;Afw為水線以下船舶正投影面積;Vc為海流的速度;β為海流入射角;Ccx(β),Ccy(β)和Ccn(β)分別為海流力及海流力矩系數,可以通過下式得到:
式中CL,CD和CN分別為船體的升力系數、阻力系數和轉矩系數。
3.3 舵槳數學模型
舵槳是推進器的一種類型。螺旋槳的推力和轉矩的數學模型[3]可表示為

式中:tP為推力減額系數;ρ為海水密度;n為螺旋槳轉速;DP為螺旋槳直徑;KT(JP)為推力系數;Jp為進速系數;KQ為轉矩系數。
進速系數可表示為

式中:u為船舶的縱向速度;wP為螺旋槳的伴流系數;KT和KQ可由螺旋槳的敞水試驗獲得。

式中:tR為舵阻力減額系數;xR為舵中心到船舶重心的縱向距離;aH為操舵導致船體橫向力的修正因子;δ為舵角。

式中:λ為展弦比,僅適用λ=0.5~3.0;Ad為舵葉面積;UR為舵處來流有效流速;aR為舵處來流有效沖角。
3.4 推力分配策略
推力分配策略的好壞直接影響到推進器對控制器指令的反應,進而對動力定位效果產生直接影響。本系統采用經過優化的序列二次規劃法[8]進行推力分配,具體策略如下:

式中:W為總消耗能量;P為權值,用來調節優化目標;s'Qs為懲罰指令推力和產生的廣義推力的誤差;Tmin和Tmax分別為推力的上下限;ΔTmin和ΔTmax分別為推力變化幅值;(α-α0)Ω(α-α0)表示角位變化范圍;權值矩陣Ω>0用來調節優化目標;式中第4項主要用來避免奇異結構,ε>0避免數值問題,δ≥0為權值參數,實際應用中可根據不同環境情況調節δ參數。
4 動力定位仿真原理
4.1 仿真流程
通過計算機模擬出船舶傳感器檢測到的各種數據,然后計算船舶當前位置與目標船位的偏差以及環境變量 (風、浪、流)對船舶位置及首向的影響,通過控制算法計算出使船舶恢復到目標位置所需的推力,并通過推力分配邏輯對各推力器的推力進行分配,確定各推力器的推進方向、螺距及轉速,進而推力器產生推力使船舶保持目標航向和船位。所有數據均由計算機模擬,通過界面編程實現船舶動力定位過程的動態展現,仿真流程如圖4所示。
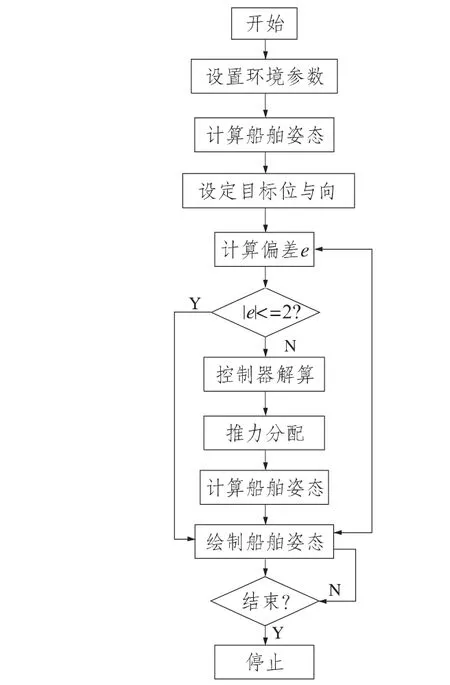
圖4 仿真流程Fig.4 Simulation process
4.2 仿真系統接口設計
仿真系統接口設計是實現仿真系統高級功能的前提,同時提高了仿真系統的可擴展性。本文采用VB與 Matlab混合編程[9]方式實現仿真系統接口功能。
1)模塊模型函數標準的建立。這是動力定位仿真系統能夠發揮多功能的基礎。標準的建立包括函數名稱,輸入/輸出參數名、格式、單位、類型等。
2)模型代碼的編寫。利用VB或Matlab編寫各種模型代碼。
3)模型組件的生成。利用ActiveX DLL技術對模型代碼進行封裝,并通過comtool工具生成COM組件。
4)仿真系統模塊的組合。根據仿真需求的不同,選擇不同的COM組件,以DLL形式引入嵌入VB中。
4.3 仿真實驗
本系統以天津港某大型挖泥船為船模,結合動力定位系統各功能模塊,對其動力定位效果做了仿真實驗,假定無外界環境干擾情況下,實驗定位點為船舶縱蕩方向40 m,橫蕩方向50 m的位置,首向設定為10°,經過一定時間的調整,定位效果如圖5所示。
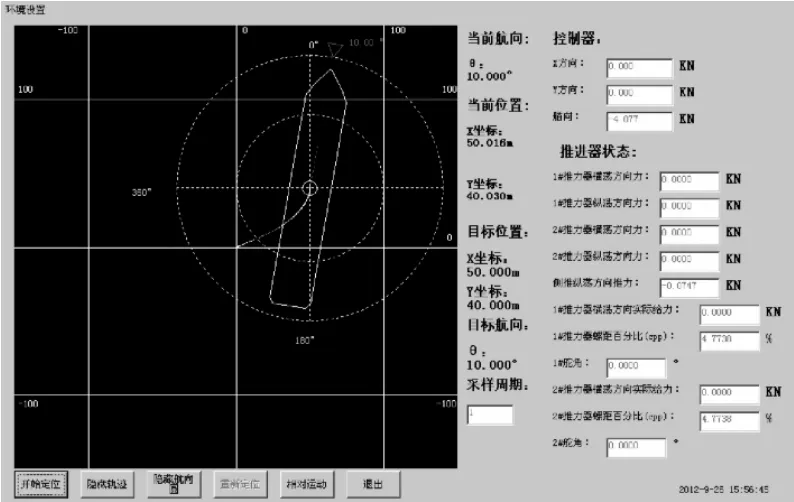
圖5 動力定位仿真實驗Fig.5 Dynamic positioning simulation experiment
5 結語
圍繞船舶動力定位仿真系統的設計,研究了系統的功能、組成、人機界面、數學模型、仿真流程等問題。為增強仿真系統的可擴展性和重用性,從模塊模型函數標準的建立、模型代碼的編寫、模型組件的生成以及仿真系統模塊的組合等方面設計仿真系統接口,并用VB與Matlab混合編程實現接口功能。將該系統進一步完善以后可以對船舶動力定位實船實驗有一定的指導意義。
[1]史斌杰,吳喆瑩.動力定位系統的最近技術進展分析[J].上海造船,2011(3):43 -45.
[2]賈欣樂,楊鹽生.船舶運動數學模型-機理建模與辨識建模第1版[M].大連:大連海事大學出版社,1999.
[3]周昭明,盛子寅,馮悟時.多用途貨船的操縱性預報計算[J].船舶工程,1983(6):21 -29.
[4]王芳,萬磊,徐如玉,等.深水半潛式鉆井平臺動力定位實時交互仿真系統[J].哈爾濱工程大學學報,2011(11):1396-1401.
[5]ISHERWOOD R M.Wind resistance ofmerchantship[J].Trans.of,RINA,1973,115:327 -338.
[6]DAIDOLA J C,GRAHAM D A,CHANDRASH L.A simulation program for vessel'smaneuvering at slow speeds[C].Proceedings of Eleventh Ship Technology and Research Symposium(STAR),1986.
[7]金鴻章,姚緒梁.船舶控制原理第1版[M].哈爾濱:哈爾濱工程大學出版社,2001.
[8]吳顯法,王言英.動力定位系統的推力分配策略研究[J].船海工程,2008(6):92 -96.
[9]譚炎,張凌燕.MATLAB與VB混合編程技術研究[J].軟件時空,2006,22(5 -3):247-249.
Simulation design on dynam ic positioning system of vessels
WU Nan,CHEN Hong-wei
(Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In order tomeet the demands of the R&D(research and development),maintenance and operating training in the field of vessel DPS,design such simulation system on the basis of a certain understanding of the DPS home and aboard.Study the function,organization,man-machine interface and simulation procedure of the DPS,and design the simulation system interface from the following aspects,such as the function standard of themodule,andmodel componentbuilding,etc.Apply VB and Matlab to program the interface function,it improves the capacity of expansion and repeated application.The system also needs improving in early-warning processing and breakdown diagnoses.
dynamic positioning;simulation system;interface programming;man-machine interface
U661.3
A
1672-7649(2013)05-0103-04
10.3404/j.issn.1672-7649.2013.05.024
2012-09-29;
2012-11-07
吳楠(1987-),男,碩士研究生,研究方向為船舶自動化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學精密工程(2016年6期)2016-11-07 09:07:19
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55