基于像素工廠的無人機遙感影像處理研究
2013-03-06 05:43:52周智勇
城市勘測 2013年5期
關鍵詞:測量
周智勇
(重慶市勘測院,重慶 400020)
基于像素工廠的無人機遙感影像處理研究
周智勇?
(重慶市勘測院,重慶 400020)
簡要地介紹了像素工廠,探討了在像素工廠中對無人機遙感影像進行空三測量方法。實現了像素工廠無人機空三成果與傳統數字攝影測量工作站的無縫銜接,并對采集的要素進行實地精度檢測分析,形成了利用無人機遙感影像進行3D產品生產的作業體系。
無人機遙感影像;像素工廠;空三測量;數字攝影測量工作站;3D產品
1 引 言
像素工廠(Pixel Factory,簡稱PF)是當今世界一流的遙感影像自動化處理系統,集自動化、并行處理、多種影像兼容性、遠程管理等特點于一身,代表了當前遙感影像數據處理技術的發展方向,主要用于地形圖測繪、城市規劃、城市環境變化監測等[1]。
近年來隨著無人駕駛低空飛行器及其輔助設備的發展,低空遙感迅速成為廣泛關注的熱點[2,3]。無人機遙感技術作為一項空間數據獲取的重要手段,具有機動快速、使用成本低、維護操作簡單等優點[4]。無人機系統由于其飛行平臺的不穩定性,影像間旋偏角和比例尺差異較大[5]。目前無人機遙感數據后處理軟件有PixelGrid-UAV、MAP-AT空三、DPGrid、Pixel Factory等。重慶市勘測院于2011年12月引進法國像素工廠,于2012年進行大量試驗,經過多個無人機項目的測試,結果表明,利用像素工廠處理無人機遙感影像精度能滿足低空數字航空攝影測量內業規范[6]。
本文針對航測生產的實際需要,簡要介紹了基于像素工廠的無人機遙感影像處理流程,探討了像素工廠處理無人機遙感影像的空三測量方法,研究了像素工廠無人機空三成果與傳統數字攝影測量工作站的無縫銜接,并對空三成果及采集DLG要素進行精度檢測,形成利用無人機遙感影像進行3D產品生產的作業體系。
2 試驗區概況
試驗區1位于重慶麻柳沿江開發區木洞片區,地貌為丘陵,攝影比例尺為1∶16 667,相對航高400 m,地面分辨率0.11 m,共使用554張影像,13條航帶,航向重疊約80%,旁向重疊約50%,覆蓋面積約13 km2,外業測量控制點21個。
試驗區2位于重慶主城南岸區,地貌為丘陵,攝影比例尺為1∶18 750,相對航高450 m,地面分辨率0.12 m,共使用1 698張影像,22條航帶,航向重疊約80%,旁向重疊約50%,覆蓋面積約50 km2,外業測量控制點49個。
3 基于像素工廠的無人機遙感影像處理流程
像素工廠采用并行計算技術,大大提高了系統的處理能力,縮短了項目周期;該系統具有強大的自動化處理技術,在少量人工干預的情況下,能迅速生成正射影像等產品;該系統在數字產品生產過程中產生的海量中間數據及結果數據通過磁盤陣列進行存儲并定期進行數據備份[7],如圖1所示為像素工廠處理無人機遙感影像作業流程。
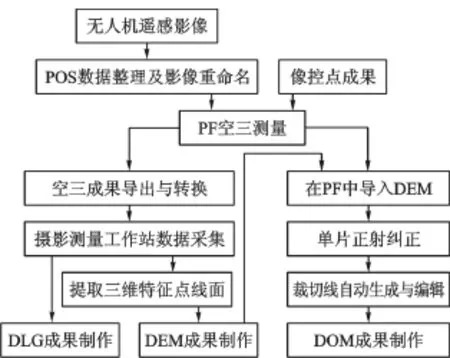
圖1 像素工廠處理無人機遙感影像作業流程
4 像素工廠空三測量
4.1 基于QGIS的自動排列航帶
將無人機航攝平臺上的慣導數據導出進行整理,在QGIS中依據初始外方位元素中的角元素KAPPA進行航帶分類,剔除航攝起飛、航帶轉彎及飛機降落時的無效數據,并考慮航攝平臺與后期像素工廠轉角系統差異,進行角元素統一改化。同時依據自動排列的航帶號對原始影像進行重命名,保證POS數據與影像數據的一致性,如圖2、圖3分別為原始POS數據與編輯后的POS數據。
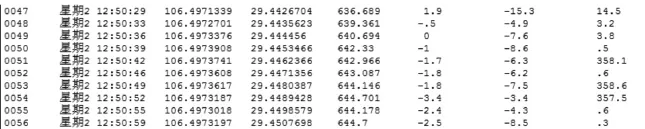
圖2 原始POS

圖3 編輯后POS
4.2 數據導入與檢查
在像素工廠中新建工程,定義項目橢球與投影,選擇導入無人機影像模塊,利用編輯后POS數據和重命名后影像,設置正確相機參數,進行影像數據預覽,檢查影像排列方向、航帶內重疊及航帶間重疊等要素,保證影像和POS正確后進行數據導入。
4.3 空三測量
依據影像像幅設置合適參數進行自動布點,進行航帶內及航帶間轉點,同時依據初始POS數據投影偏差確定同名影像搜索范圍、相似度、最大高差等參數,進行同名點自動影像匹配。在點匹配完成后,調整像素工廠提供的無人機影像糾正模型參數,在自由網階段僅調整內方位元素,便于發現觀測值中的粗差。反復調整參數及點位,使得每張影像上至少有3個航帶間連接點,粗差全部排除,最大點位像方誤差調整至2個像素內,且點位分布均勻,完成自由網平差。
外業像控點測量成果進行格式轉換后投影到影像上,依據外業實刺點位進行調整。重新調整像素工廠無人機影像糾正模型參數,包括外方位元素、切向畸變參數、徑向畸變參數、切比雪多夫多項式參數等,通過反復調整參數、微調控制點點位及殘差較大的連接點點位,直至基本定向點、檢查點達到規范要求,完成空三測量,如表1所示為像素工廠空三優化結果。
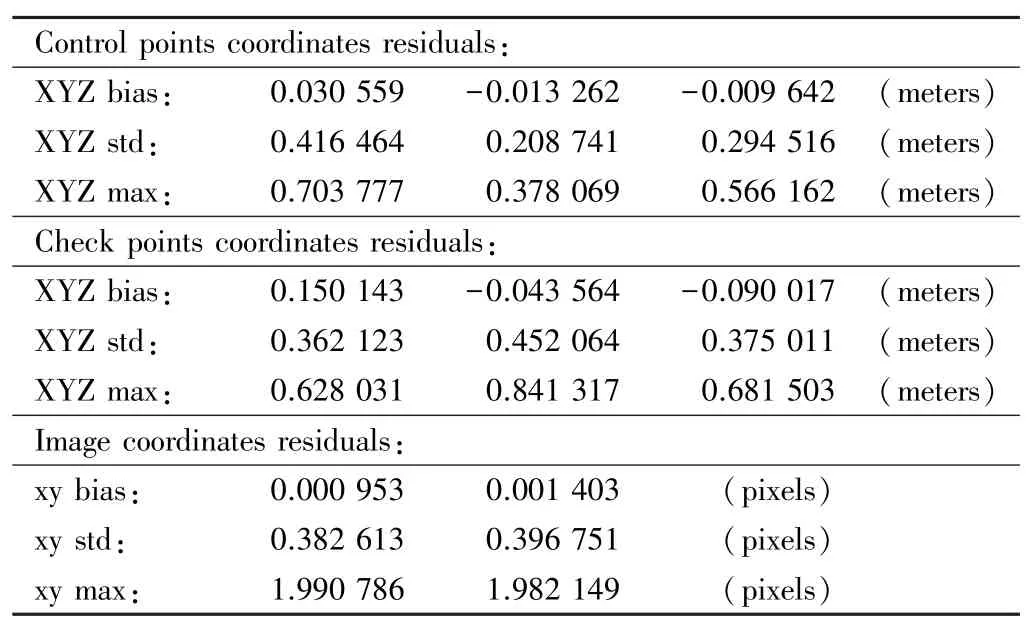
試驗區1像素工廠空三優化結果 表1
4.4 空三成果與攝影測量工作站無縫銜接研究
像素工廠主要產品有DSM、DEM、DOM及一系列中間成果。但目前DSM應用不多,而得到高精度DEM編輯工作量較大,且在成片的森林及大范圍的高樓區域從DSM編輯到DEM非常困難,而大部分項目需要高精度DEM成果進行分析及應用。因此,采用攝影測量工作站采集三維特征點線面數據就成為必然。
像素工廠空三成果支持導出所有連接點的像方坐標文件及物方坐標文件。而攝影測量工作站(以Virtuo-Zo為例)建立立體模型需要將影像旋轉為豎直方向,且相鄰航線旋轉角度差180°,同時需要將加密點像方坐標按單個像對存放的PCF文件。首先在像素工廠中導出連接點旋轉90°和270°的像方坐標,同時結合像素工廠像方坐標的起算點與攝影測量工作站起算點不同(VirtuoZo是以像片中心點為像平面直角坐標系的坐標原點,PF是以像片左上角點為坐標原點)、坐標軸不同(x軸方向一致,y軸方向相反)、像方坐標單位不同(Virtuo-Zo空三加密點的像方坐標單位為微米,PF空三加密點的像方坐標單位為像素),將像素工廠導出的像方坐標文件轉換成以單個模型為單位的像方坐標文件PCF,實現像素工廠空三成果與攝影測量工作站的無縫銜接。從而能夠進行三維特征數據的采集,生成高精度的DEM成果,并能夠在攝影測量工作站上進行DLG數據生產,彌補像素工廠不能生產DLG數據的不足。在像素工廠中引入高精度的DEM成果,利用像素工廠強大的并行計算能力及高自動化的處理技術,快速高效生成高質量的DOM成果,從而實現3D產品的生產。

PF和VirtuoZo空三加密點像方坐標 表2
5 精度分析
為充分驗證像素工廠處理無人機遙感影像空三成果精度,分別選擇郊區和城區兩個試驗區進行精度統計分析。
試驗區1(郊區)檢測情況:空三結果基本定向點平面位置差最大值0.80m,高程差最大值0.57m,檢查點平面差最大值1.05m,高程差最大值0.68m。外業實地檢測平面點31個,中誤差0.46m,最大差0.95m;高程點227個,中誤差0.26m,最大差0.94m。
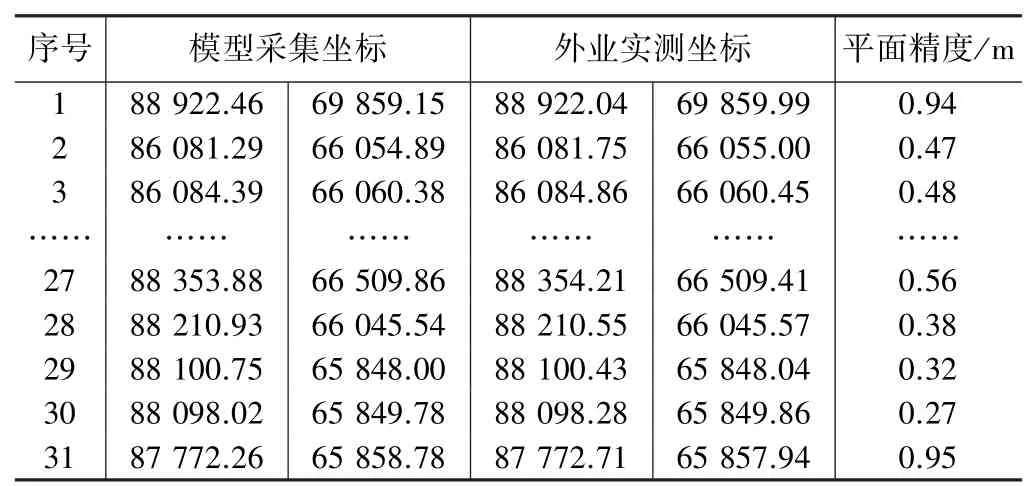
平面精度統計 表3
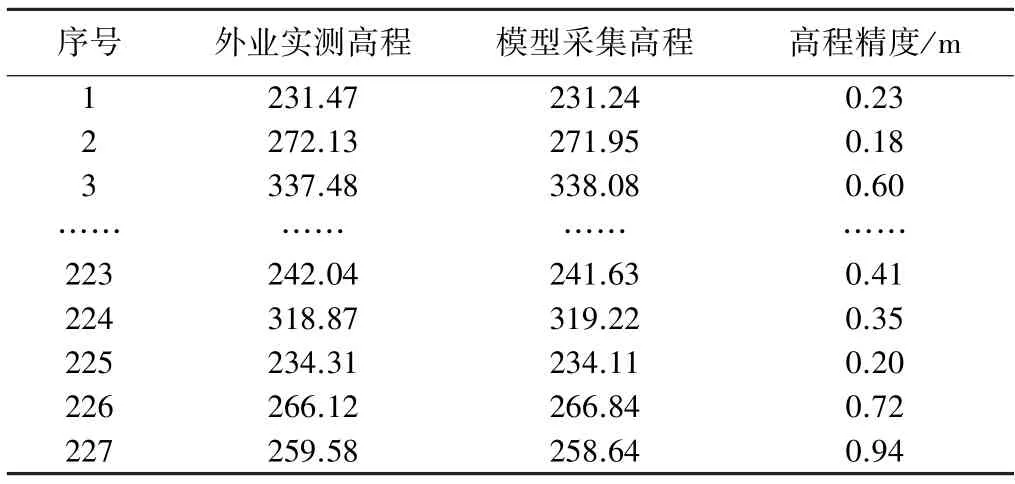
高程精度統計 表4
試驗區2(城區)檢測情況:空三結果基本定向點平面位置差最大值1.02 m,高程差最大值0.66 m,檢查點平面差最大值1.11 m,高程差最大值0.59 m。測區位于主城區,有采用常規工程測量方法繪制的1∶500地形圖。通過制作的DOM成果套合1∶500地形圖進行平面精度檢測,套合精度良好。

圖4 DOM成果套合1∶500地形圖
6 結 語
無人機遙感系統具有機動快速的響應能力、高分辨率影像獲取能力、操作簡便及使用成本低等優勢,因此無人機遙感系統應用將越來越廣泛。但其海量原始數據快速、精確處理問題一直是限制其發展的瓶頸。本文研究利用具有若干計算能力強大的計算節點,集自動化、并行處理、遠程管理等特點于一身的像素工廠來處理無人機遙感影像數據。對于像素工廠不能生產DLG的局限性,開發了程序對像素工廠空三成果進行轉換,得到滿足攝影測量工作站立體采集的相關數據文件,實現像素工廠與常規生產的無縫銜接,形成基于像素工廠處理無人機遙感數據及生產3D產品的作業體系。
[1] 曹敏,史照良.新一代海量影像自動處理系統“像素工廠”初探[J].測繪通報,2006(10):55~58.
[2] 范承嘯,韓俊,熊志軍等.無人機遙感技術現狀與應用[J].測繪科學,2009(5):214~215.
[3] 崔紅霞,林宗堅,孫杰.無人機遙感監測系統研究[J].測繪通報,2005(5):11~14.
[4] 劉慶元,劉有,鄒磊等.無人機遙感影像拼接方法探討[J].測繪通報,2012(5):53~55.
[5] 柯濤,張永軍.SIFT特征算子在低空遙感影像全自動匹配中的應用[J].測繪科學,2009(4):23~26.
[6] CH/Z 3003-2010.低空數字航空攝影測量內業規范[S].
[7] 邢誠,劉冠蘭.像素工廠的研究與探討[J].計算機與數字工程,2008(9):132~134.
The Research of UVA Remote Sensing Image Processing Based on the Pixel Factory
Zhou Zhiyong
(Chongqing Survey Institute,Chongqing 400020,China)
This article briefly describes Pixel Factory,and discusses the aerial triangulation method of UAV remote sensing image using the Pixel Factory.It turns out that the result produced by Pixel Factory can be seamlessly linked to traditional digital photogrammetric workstation.Besides,combined with site accuracy analysis of collected elements,Finally it summarizes a operating system for 3D products using UAV remote sensing image with the software of Pixel Factory.
UAV remote sensing image;pixel factory;aerial triangulation;digital photogrammetric workstation;3D products
1672-8262(2013)05-53-03
P237
A
2013—01—18
周智勇(1979—),男,工程師,主要從事攝影測量與地理信息系統的生產與管理工作。
國家科技支撐計劃(2011BAH12B07-03)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
