基于差分盒維數法的水工鋼結構腐蝕率檢測
2013-02-14 06:28:40王澤民郭建斌
腐蝕與防護 2013年5期
王澤民,郭建斌,王 楠
(河海大學 水利水電學院,南京210098)
水工鋼結構腐蝕的檢測方法[1],主要有:無損測厚儀和卡尺類專用工具。無損測厚儀的特點是操作方便,但其結果的精確性依賴于測點周圍的腐蝕形貌特征[2],例如在密集的銹斑、蝕坑群等位置,檢測數據存在較大誤差;卡尺類工具的檢測結果精確度高,但其操作性較低,例如在閘門面板中心處等位置存在難以測量的問題。
現行的水工鋼結構腐蝕檢測方法存在一定的局限性,完全或大數抽樣檢測十分困難,通常采用小數抽樣進行檢測[3]。小數抽樣法樣本容量小,檢測結果的可靠性較低,難以全面描述水工鋼結構的腐蝕狀態,不利于評估鋼結構的安全性、預估剩余壽命[4-5]。為了解決上述問題,本工作運用數字圖像處理技術與分形理論,計算腐蝕灰度圖像內隨機測點的差分盒維數,探尋維數與腐蝕率之間的關系,從而達到快速、大量檢測腐蝕率的目的,為安全管理部門提供可靠的腐蝕檢測結果。
1 數字圖像處理技術
數字圖像,即將連續的模擬圖像經過離散化處理后,形成計算機能夠辨識的點陣圖像[6]。嚴格的數字圖像是一個經過等距離矩形網格采樣,對采樣點亮暗幅度進行等間隔量化的二維函數,因此,數字圖像實際上就是被量化的二維采樣數組。數字圖像的最小單元是像素,各像素的灰度值用整數表示,像素與像素之間存在著嚴格的自相似性[7]。一副M×N大小的數字圖像,其像素灰度值可用M行、N列的矩陣F表示,見公式(1)所示:
數字圖像處理[6],即Digital Image Processing,是通過計算機對公式(1)進行數字運算,從而對數字圖像進行平滑、增強、復原、分割、提取特征等處理的方法和技術。
圖像平滑(Smoothing),其主要目的是減少圖像噪聲(干擾信號)。對于腐蝕灰度圖像而言,因采集工具、現場環境等因素的制約,圖像中容易出現噪聲,影響計算結果的精確性。減少噪聲的方法有空域濾波和頻域濾波。空域濾波方法借助模板進行鄰域操作,即將圖像各像素和其鄰域像素與模板系數進行乘積求和操作。例如,3×3模板K見公式(2)所示:
將式(2)矩陣中點k5與式(1)中某一像素重合,將模板覆蓋下的各點像素與模板系數進行乘積求和運算,遍歷式(1)中所有可以到達的像素點,即得到降噪后的數字圖像矩陣,見公式(3)所示:
鄰域均值法是圖像降噪處理中的經典算法,對噪聲有較好的抑制效果。考慮到保留圖像細節和降噪效果,本工作選取(4-鄰域)均值濾波器對腐蝕灰度圖像進行濾波降噪處理,其模板k4-鄰域為:
2 差分盒維數法
通常,腐蝕灰度圖像呈現出不連續非線性的特點,難以用歐式幾何進行度量。1975年,Mandelbort提出分形理論,研究“無序”現象背后的“有序”特征[7]。分形理論中,通過改變度量尺度的大小求得研究對象的非整數維數,即分形維數。分形維數的基本算法如下:設某一有界集合A,其分形維數D,如公式(1)所示:

式中:r為所有坐標方向上的尺度因子;Nr為填滿有界集合A的互不相交閉集的最小統計量。
目前,分形理論在各個研究領域內都發揮著越來越大的作用,例如,焊縫邊緣檢測[8]、植物種群格局[9]等。
在分析眾多算法的基礎上,Sarkar和Chaudhuri提出了較為簡單、快速的分形維數算法,即差分盒維數法[10-11](Differential Box-Counting,簡稱DBC算法)。
在差分盒維數算法中,將給定面積為M×M的灰度圖像,按邊長s劃分成s×s的網格(1<s≤M/2,s是正整數,尺度r=s/M),每一個網格上都由一系列體積為s×s×s的盒子疊放形成三維空間,如圖1所示。將該二維灰度圖像想象成三維物體,其中,像素點的坐標即為平面坐標,像素的灰度值為z軸坐標。假設在平面的第(i,j)網格內,圖像灰度最大值和灰度最小值分別落在第1個和第k個盒子內,則在第(i,j)網格內的盒子數nr值為:

計算所有網格的nr值,有

選取不同的網格邊長s,計算r值和最小統計量Nr。根據式(4),對lg(Nr)和lg(1/r)采用最小二乘法線性擬合計算斜率,即為對應的差分盒維數D。
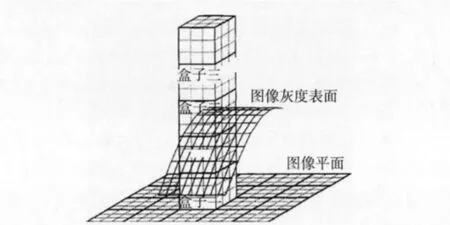
圖1 用DBC算法確定nr
在計算過程中,若M不能被s整除,則s×s的窗口就無法完整地覆蓋整個M×M的圖像,導致計算結果的精確度下降。因此,本工作采用擴張窗口的方法[12],修正維數計算過程。計算流程如圖2所示。
3 腐蝕速率-DBC維數檢測試驗
試驗擬采用差分盒維數法計算鋼結構腐蝕灰度圖中隨機測點的DBC維數值,用卡尺測量所選測點的蝕余厚度,換算成腐蝕率。通過試驗數據分析,研究腐蝕率與DBC維數之間的相關性。
3.1 試驗過程
試驗選取A3鋼腐蝕試片,將其制成試驗用的25mm×50mm×4mm小試塊5件(編號1#~5#),用200#~800#砂紙逐級打磨,并清洗、脫脂、干燥,采集腐蝕灰度圖像,用(4-鄰域)均值濾波器進行降噪,最后將所得的灰度圖裁剪成300piexl×500piexl大小,如圖3所示。
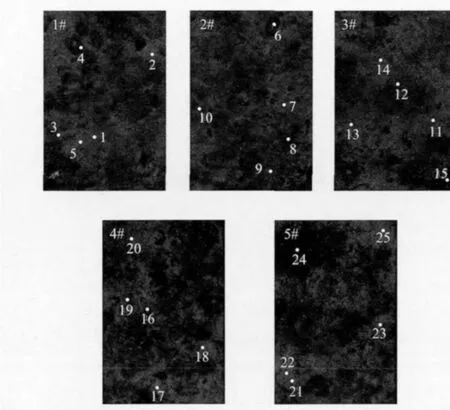
圖3 腐蝕試塊1#~5#灰度圖(縮放比例1:4)
在每個灰度圖上隨機選擇5個測點,共計25個測點。用圖2所示算法計算DBC維數,用卡尺類工具,測量所有測點的坑深,換算成對應的腐蝕率,結果見表1所示。
用數學軟件工具Matlab對表1中各點的腐蝕率和對應的DBC維數進行分析,計算兩者的線性相關系數為0.939 6,說明腐蝕速率與DBC維數之間具有較好的線性關系,如圖4所示。
3.2 方法檢驗
在圖2中隨機選擇若干個新測點,計算出每個測點的DBC維數值,利用腐蝕速率與DBC維數之間的線性關系,對上述新測點進行線性插值計算,得計算腐蝕速率,并與實測腐蝕率進行對比,以計算結果來驗證該方法的準確性,結果見表2。
由表2第6列數據可知,運用腐蝕率-DBC維數檢測方法進行的腐蝕速率計算,其結果與實測值的相對誤差僅在2.0%~3.19%之間。所以,該方法具有較高的準確性,可以運用于腐蝕檢測。
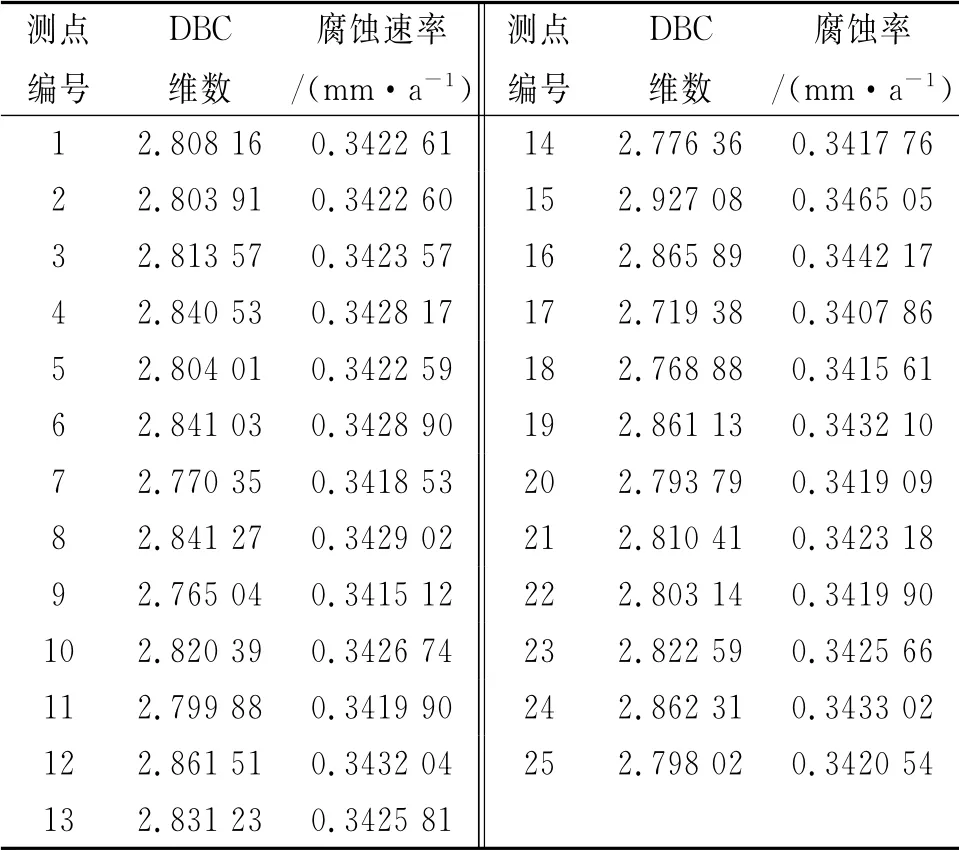
表1 25個隨機測點的腐蝕率-DBC維數檢測結果
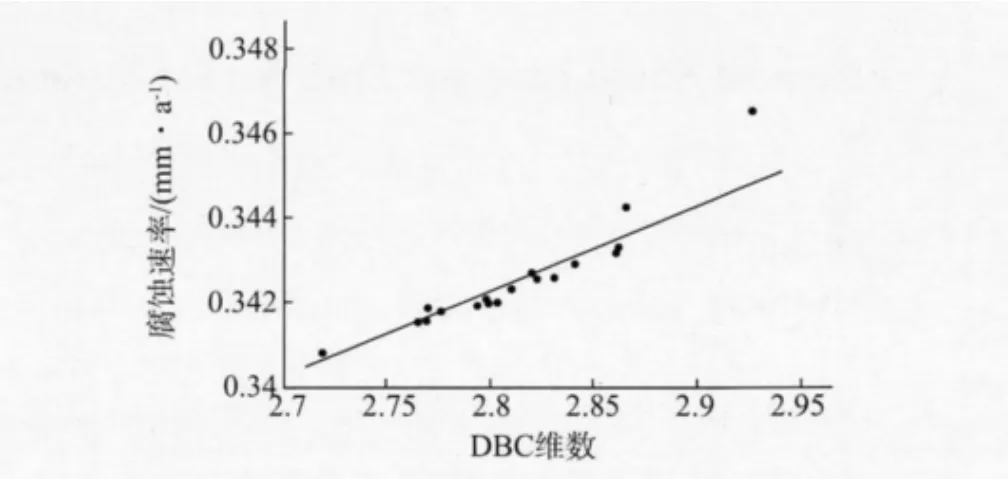
圖4 腐蝕率-DBC線性相關性
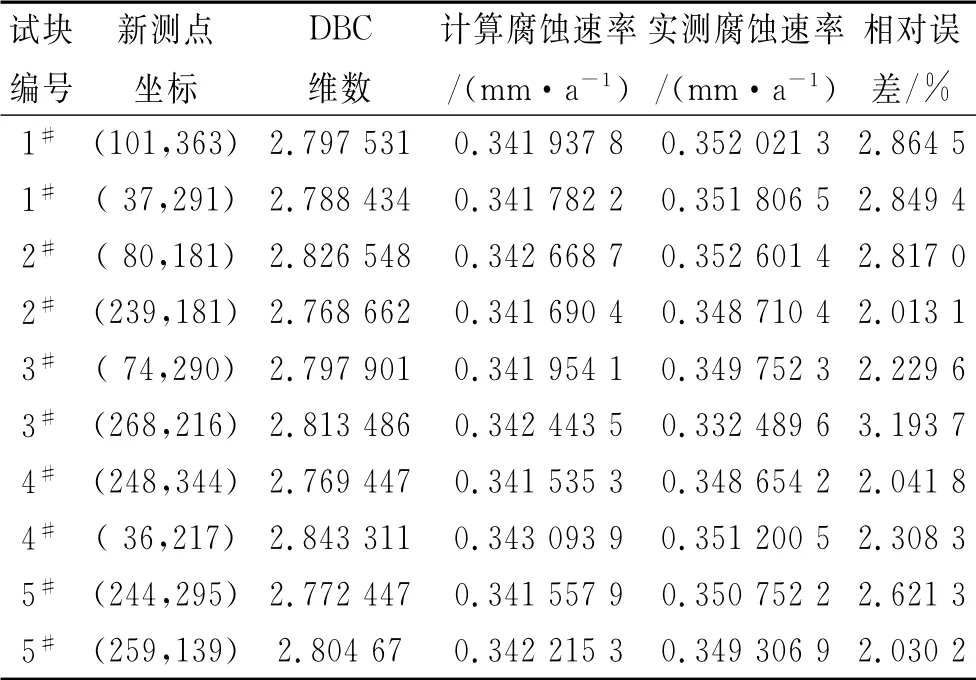
表2 腐蝕率-DBC維數檢測模型檢驗計算結果
4 結論
(1)相較于人工檢測方法,運用數字圖像處理技術進行腐蝕速率檢測工作,可以大幅提高腐蝕檢測效率,有助于加強安全部門對鋼結構腐蝕的控制與管理。
(2)DBC維數可以有效地反映腐蝕形貌的復雜程度,通過對腐蝕灰度圖像的DBC維數和腐蝕速率進行數據分析,可知上述兩者之間存在著較好的線性關系。
(3)通過腐蝕率-DBC維數檢測方法,可以快速、準確地計算出任意一點處的腐蝕速率,為評估鋼結構腐蝕安全狀態和預測鋼結構剩余壽命提供可靠地參考依據。
[1]易曉蘭.水工金屬結構腐蝕檢測方法[J].甘肅農業,2002,23(6):55-56.
[2]潘榮寶.超聲測厚儀及測厚[J].壓力容器,1996,13(1):58-63.
[3]郭建斌,聞源長.基于Bayes試驗方法的水工鋼閘門腐蝕速率更新[J].腐蝕與防護,2009,20(6):394-397.
[4]周 力.水工鋼閘門的檢測及強度計算[J].中國農村水利水電,2007,49(1):97-98.
[5]任玉珊.既有水工鋼閘門耐久性評估方法研究[J].大壩與安全,2003,2(2):55-57.
[6]楊帆.數字圖像處理及分析[M].北京:北京航空航天大學出版社,2007.
[7]張濟忠.分形[M].北京:清華大學出版社,1995.
[8]劉明芹,張曉光.差分盒維法在焊縫邊緣檢測上的應用研究[J].河北工業科技,2009,26(5):300-302.
[9]宋萍,洪偉,吳承禎,等.天然黃山松種群格局的分形特征-盒維數與信息維數[J].武漢植物學研究,2004,22(5):400-405.
[10]Sarkar N,Chaudhuri B B.An efficient differential box-counting approach to compute fractal dimension of images[J].IEEE Transactions System Man and Cabernet,1994,24(1):115-120.
[11]Sarkar N,Chaudhuri B B.An efficient approach to estimate fractal dimension of texture images[J].Pattern Recognition,1992,25(9):1035-1041..
[12]張濤,孫林,黃愛民.圖像分形維數的差分盒維數法的改進研究[J].電光與控制,2007,14(5):55-57.
猜你喜歡
建材發展導向(2022年14期)2022-08-19 02:10:10
建材發展導向(2022年14期)2022-08-19 02:08:18
山東冶金(2022年1期)2022-04-19 13:40:48
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發展導向(2021年9期)2021-07-16 07:10:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國公路(2017年15期)2017-10-16 01:31:54