基于SURF特征點UCAV環境感知
2013-02-13 09:57:10吳德偉邰能建
電視技術 2013年17期
周 陽,吳德偉,邰能建,杜 佳
(空軍工程大學 信息與導航學院,陜西 西安710077)
責任編輯:任健男
認知導航系統(Unmanned Combat Aerial Vehicles,UCAV)[1]能從當前環境中提取合適的特征以描述UCAV當前所在環境的局部特征,計算出所對應的空間3D坐標等幾何信息,并以此作為環境自然路標,實現全局定位與環境認知地圖的創建。可見環境感知是UCAV實現認知導航的一個重要環節。
UCAV不同于人,其環境感知難以體現智能性。然而環境感知的關鍵在于對環境的描述,也就是說,當UCAV具有很好的描述能力時,也就具備了一定環境感知能力。通常環境信息可通過視覺獲取,其直觀表示便是圖像,因此以圖像信息表征環境信息成為了環境感知一種形式,對圖像的描述能力間接體現了環境感知能力。然而UCAV高機動性及所處環境復雜性,帶來圖像尺度、旋轉甚至仿射變化,使得環境感知更加困難,特征點提取方法的出現為克服這種困難提供了思路。
本文首先分析了幾種特征點檢測方法,然后以SURF算法為重點,分析了基于該算法的特征點提取原理,最后仿真驗證了SURF算法提取特征點魯棒性,并以此作為UCAV環境感知的依據,較好解決UCAV以圖像作為環境感知信息時多變性問題。
1 特征點檢測方法分析
特征點檢測目的在于找到圖像中對平移、旋轉、尺度不變性的特征點,通過局部不變性的分析達到識別圖像的目的。常用的特征點檢測方法有Harris算法[2]、SIFT算法[3]和SURF算法[4]。
Harris特征點檢測算法對圖像的平移、旋轉和噪聲都具有很強的穩定性,但不具有尺度不變性,因而無法直接應用于尺度不變特征的定位處理[5],無法滿足UCAV認知導航環境感知中特征點提取多尺度要求。SIFT算法是Lowe在LOG算子[6]基礎上提出的,其具有較好的抗旋轉、平移、尺度變化和噪聲污染能力,但該算法計算復雜度高、匹配速度慢,不具有實時性要求[7]。SURF算法是Bay提出的基于積分圖像的快速Hessian算子三維極值點搜索尺度不變特征定位方法,其具有SIFT算法提取特征點的魯棒性,且有效克服了SIFT算法實時性差的缺點,而且在克服尺度變化影響方面優于Harris算法[8],較好運用在景象匹配輔助導航[9]、智能車輛交通信號檢測識別[10]、目標姿態估算[11]等方面,更適合于UCAV認知導航環境感知中特征點檢測。
2 基于SURF算法的特征點檢測
SURF算法實現核心是引入了積分圖像,并將高斯二階微分模板進行了轉換,采用Haar小波響應獲取特征點的主方向及特征描述矢量。該算法大大縮短了圖像特征點的提取時間,同時提取的特征點具有旋轉和尺度不變性,以滿足圖像特征點匹配的要求。
2.1 特征點檢測
特征點檢測時首先需要積分圖像,然后將高斯二階微分模板替換為盒子濾波器,圖像的卷積轉換成盒子濾波運算,以此檢測特征點。同時通過不斷擴大的盒子濾波器尺寸來求取積分圖像濾波響應,以此建立尺度金字塔。
積分圖像由Viola和Jones[12]提出,圖像中任意一點p=(i,j)的積分值II(i,j)為原圖像原點到P點相應的對角線區域灰度值總和

給定圖像I中一點p=(i,j),在點P處,尺度為σ的Hessian矩陣H(p,σ)定義為

式中:Lxx(p,σ)為高斯二階微分在點P處與圖像I的卷積。Lxy(p,σ),Lyy(p,σ)以此類推。Hessain矩陣的行列式為

SURF算法進行特征點檢測時需簡化模板,對于σ=1.2的高斯二階微分模板,設定模板的尺寸為9×9,并將白色區域的值設為1,灰色區域設為0,黑色區域設為-2。模板簡化前后如圖1所示。
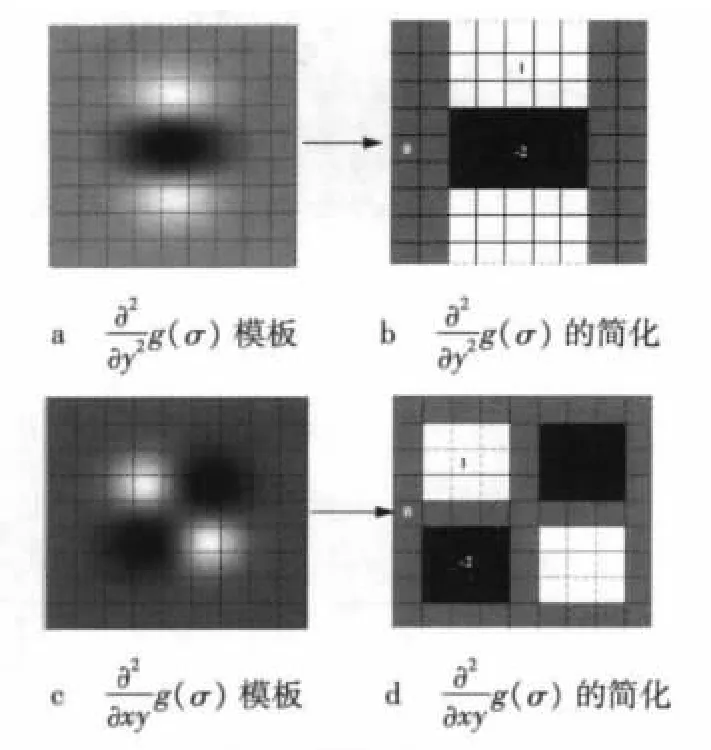
圖1 模板對比圖
設對應簡化后模板對圖像進行卷積的結果為Dxx,Dyy和Dxy。由此對Hessian矩陣行列式進行簡化可得

不同大小的盒子濾波器和原圖像進行卷積就可得到尺度圖像金字塔。本文特征點檢測時設置了5組濾波器尺寸。其中前3組尺寸如圖2所示。
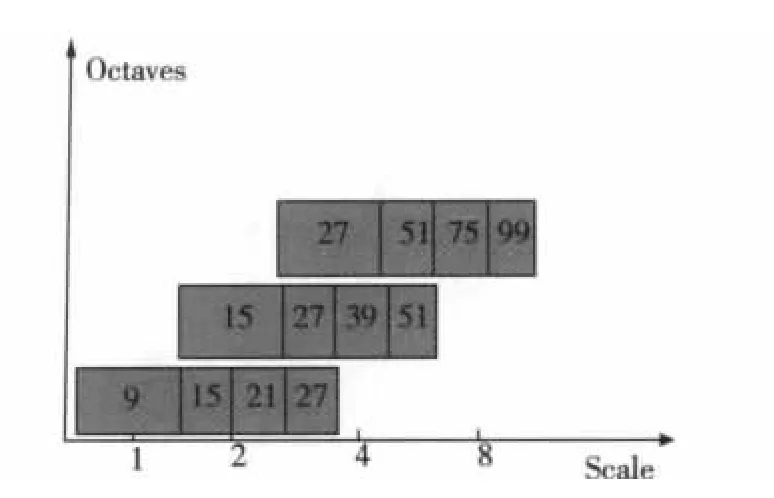
圖2 濾波器尺寸圖形化表示
由此,將空間每個點在相鄰位置和相鄰尺度上的Hessian響應值(共26個)進行比較,極值點即為檢測到的特征點,其對應的位置和尺度即為特征點位置和尺度。
2.2 確定特征點主方向
確定特征點主方向時,首先以特征點為中心,以6s(s為特征點的尺度)為半徑的圓形區域內在x和y方向進行Haar小波響應運算。然后使用σ=2s的高斯加權函數對Haar小波響應進行高斯加權。最后用60°的扇形窗口在以特征點為圓心的區域內以固定步長進行滑動,求取滑動窗口內x和y方向Haar小波響應累加值,特征點主方向即為最大值所對應的方向,如圖3所示。
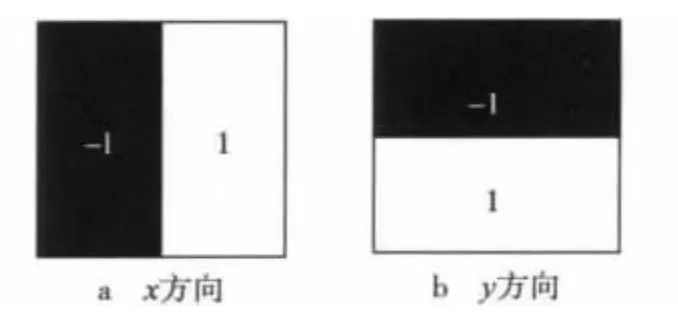
圖3 Haar小波x方向和y方向響應模板
2.3 生成特征描述矢量
生成特征描述矢量時首先以特征點為中心沿主方向將20s×20s的圖像劃分成4×4個子塊,然后用尺寸為2s的Haar模板求取每個子塊響應值,并對響應值∑dx,∑|dx|,∑dy,∑|dy|進行統計,生成特征描述矢量。由于對每個特征點進行描述時有4×4個子塊,而每個子塊用4維向量表示,因此生成的特征點特征矢量共有64維。
在完成以上3個步驟后,即可獲得圖像的特征點,同時給出每個特征點的位置、尺度、主方向和描述矢量的信息。圖4給出了圖像中檢測到的特征點。圖像大小為306×306,共檢測到516個特征點。
2.4 特征點匹配
特征點匹配時需要充分利用待匹配圖中的特征點描述矢量間關系,如果提取的兩個特征點描述矢量間距離很小,則表示這兩個特征點在對應場景同一位置的可能性很大;反之,若描述矢量間距離很大,則在對應場景同一位置的可能性很小。

圖4 圖像中檢測到的特征點
3 仿真驗證及結果分析
仿真圖像大小為306×306,首先用SURF算法檢測待匹配兩幅圖像的特征點,然后采用最近距離法進行特征點粗匹配,最后通過最近和次近距離比值法提純匹配對(閾值為0.65)。具體分析內容有SURF特征點抗噪聲性分析,SURF特征點抗旋轉性分析,SURF特征點抗尺度變化性分析。性能指標為匹配分數和錯誤率。
匹配分數定義為兩幅圖像特征點之間正確匹配對的數量與兩幅圖像中檢測到的較少特征點數量之比。錯誤率表示提純后特征點錯誤匹配對數量與提純后總匹配對總數量之比。
3.1 抗噪聲性分析
表1給出了圖像受不同強度噪聲干擾時特征點檢測與匹配情況。選取噪聲為零均值高斯噪聲,在相同條件下做了20組實驗,取平均值進行性能分析。

表1 高斯噪聲下特征點檢測匹配情況
由表可知:不同噪聲強度下檢測到的特征點數與匹配分數不同;隨噪聲方差增加,匹配分數逐級減小,且噪聲小時匹配分數很高(方差為0.01時匹配分數高達40.12%);各個噪聲下匹配對錯誤率均在5%以下;當噪聲方差超過0.06時匹配分數低于10%,圖像基本無法識別。
可見,SURF算法檢測到的特征點有一定的抗噪聲能力,當UCAV的感知圖像受到弱噪聲干擾時,可以通過特征點提取來識別圖像,實現環境感知。高斯噪聲下特征點匹配圖如圖5所示。
3.2 抗旋轉性分析
表2給出了目標圖像旋轉不同角度時特征點檢測與匹配情況。
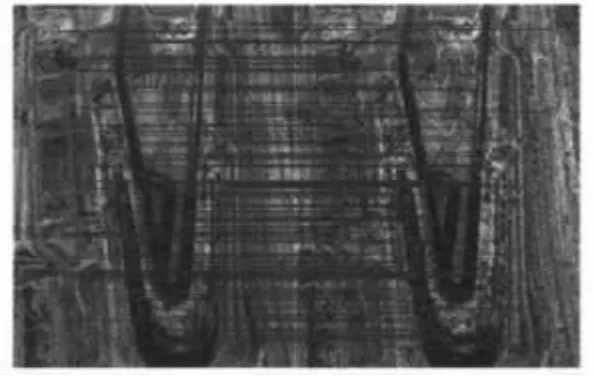
圖5 高斯噪聲下特征點匹配圖
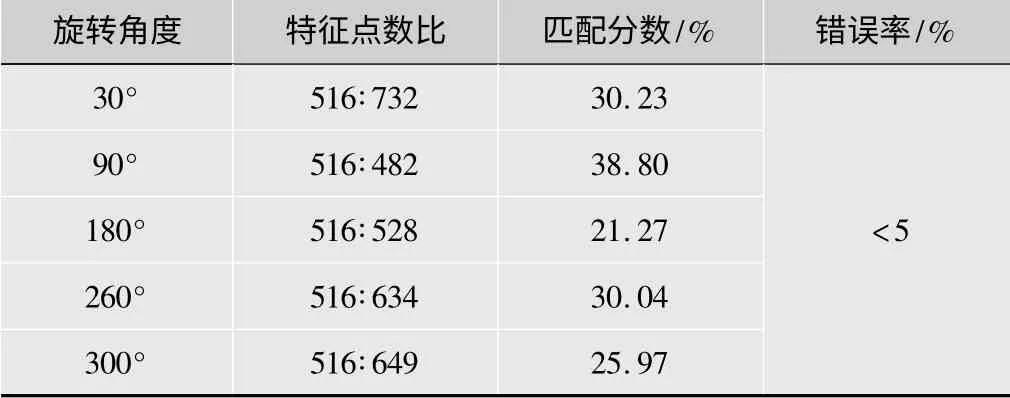
表2 不同旋轉角度下特征點檢測與匹配情況
由表可知:同一場景在不同旋轉角度下檢測到的特征點數是有差別的;各個旋轉角度下均有較高的匹配分數和較低的錯誤率。
可見,SURF算法提取特征點具有良好的抗旋轉能力。當UCAV感知圖像發生任何角度旋轉,都能通過提取特征點達到識別圖像感知環境的目的。
圖6是目標圖像相對基準圖像旋轉180°時特征點匹配圖。

圖6 圖像旋轉180°特征點匹配圖
3.3 抗尺度變化性分析
表3給出了圖像發生尺度變化時特征點檢測與匹配情況。
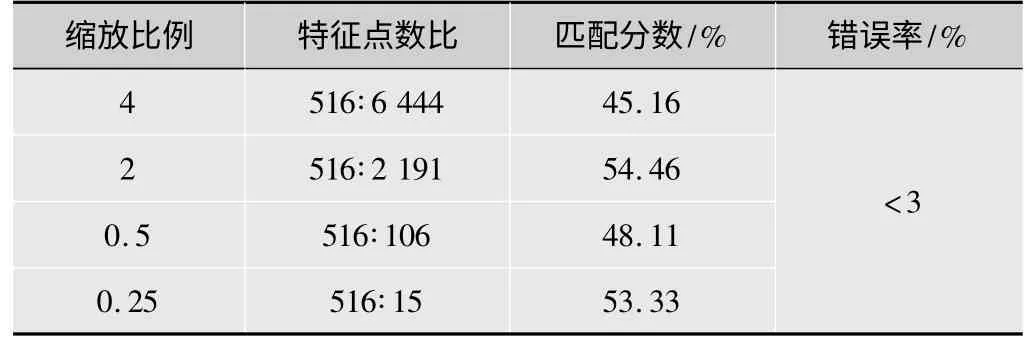
表3 尺度變化下特征點檢測與匹配情況
由表可知:不同縮放比例下檢測到特征數量差別很大,但采用比值法提純匹配后能獲得較高的匹配分數,均超過45%;各縮放尺度下特征點匹配對錯誤率均低于3%。圖像縮小0.5時的特征點匹配圖如圖7所示。
圖7 圖像縮小0.5時的特征點匹配圖
可見,SURF算法提取特征點能有效克服圖像尺度變化,當UCAV獲得感知圖像在尺度上發生變化時均能通過特征點提取來感知環境。
4 結束語
本文將SURF特征點檢測與匹配引入到UCAV環境感知中。實驗結果表明SURF算法提取特征點具有較好的魯棒性,能有效解決UCAV以圖像作為環境感知信息時遇到的圖像污染、旋轉和尺度變化等問題,為UCAV較好地實現環境感知提供了有效的方法。
[1]吳德偉,邰能建,戚君宜.基于認知理論的UCAV智能導航研究新進展[J].空軍工程大學學報:自然科學版,2011,12(4):52-57.
[2]HARRIS C,STEPHENS M.A combined corner and edge detector[EB/OL].[2012-11-20].http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.231.1604.
[3]LOWE D G.Object recognition from local scale-invariant feature[C]//Proc.IEEE International Conference of Computer Vision.Kerkyra,Greece:IEEE Press,1999:1150-1157.
[4]BAY H,TUVTELLARS T,GOOL L V.SURF:speeded up robust feature[C]//Proc.the European Conference on Computer Vision.Graz,Austria:University of Liubljanna,2006:404-417.
[5]王廣學,黃曉濤,周智敏.SAR圖像尺度不變特征提取方法研究[J].中國圖象圖形學報,2011,12(12):2199-2250.
[6]LINDEBERG T.Feature detection with automatic scale selection[J].International Journal of Computer Vision,1998,30(2):79-116.
[7]朱英宏,李俊山,郭莉莎,等.基于LBP的瓷都不變特征的描述和匹配算法[J].計算機輔助設計與圖形學報,2011,10(10):1758-1763.
[8]鄭玉龍.復雜環境下尺度不變特征點檢測與匹配技術研究[J].科學技術與工程,2011,11(23):5693-5701.
[9]王先敏,增慶化,熊智,等.結合慣性導航特性的快速景象匹配算法[J].系統工程與電子技術,2011,9(9):2055-2059.
[10]CHEN Long,LI Qingquan,LI Ming,et al.Traffic sign detection and recognition for intelligent vehicle[C]//Proc.IEEE Intelligent Vehicles Symposium.[S.l.]:IEEE Press,2011:908-913.
[11]SONG Kaitai,CHANG Chehao.Objiect pose estimation for grasping based on robust center point detection[C]//Proc.Asian Control Conference.[S.l.]:IEEE Press,2011:305-310.
[12]VIOLA P,JONES M.Rapid objiect detection using a boosted cascade of simple feature[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press,2001:1511-1518.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
