機載激光雷達航帶平差實驗研究
——基于參數模型和地面控制點數據
2012-12-27 06:40:00王圣堯劉圣偉崔希民郭大海鄭雄偉
自然資源遙感 2012年2期
關鍵詞:模型
王圣堯,劉圣偉,崔希民,郭大海,鄭雄偉,魯 瀟
(1.中國國土資源航空物探遙感中心,北京 100083;2.中國礦業大學(北京),北京 100083)
機載激光雷達航帶平差實驗研究
——基于參數模型和地面控制點數據
王圣堯1,2,劉圣偉1,崔希民2,郭大海1,鄭雄偉1,魯 瀟1
(1.中國國土資源航空物探遙感中心,北京 100083;2.中國礦業大學(北京),北京 100083)
機載激光雷達測量獲取的地表點云數據在經過預處理解算后仍會殘余部分航帶性系統誤差,因此,在利用點云數據生成DEM等相關數字產品之前,必須檢查并改正這部分航帶性系統誤差。以此為主要目標,選擇“十二參數模型”進行航帶平差,總結航帶平差的一般技術流程,并對航帶平差過程中是否引入地面控制點的結果進行對比分析。結果表明,引入地面控制點進行航帶平差,數據的內外部精度均得到有效改善。
機載激光雷達;航帶平差;十二參數模型
0 引言
目前,機載激光雷達測量技術主要用于快速獲取大面積三維地形數據,這些數據表現為大量的、離散的激光點,每一個激光點都包含三維坐標和強度值等信息[1]。大面積機載激光雷達掃描測量通常以多航帶重疊掃描測區的方式來完成,這可能導致在航帶重疊區同一地理位置上,分屬2個或多個航帶的數據高程不連續,這種高程差就稱之為航帶性系統誤差。若航帶性系統誤差超過一定閾值,則可能造成后續激光點云數據分類錯誤,隨之用其生成的DEM等數字產品就無法正確反映真實地形。一般利用航帶重疊區的共軛點或地面控制點資料建立觀測方程,以航帶平差的方式來消除這種誤差影響。目前國際上提出了多種消除航帶性系統誤差的數學模型,從簡單的“三參數模型”到復雜的“十二參數模型”。“三參數模型”僅針對高程系統誤差進行改正,該方法的連接點須在地形平坦區域[2];“六參數模型”和“七參數模型”假設航帶無變形,只存在正形變換,該方法的主要問題是連接點與控制點的三維坐標必須對應,這在實際的激光雷達數據中進行選擇和量度較為困難[3];“十二參數模型”雖然要求連接點和控制點的三維坐標必須對應,且參數多,相關性高,但只要連接點數量足夠且分布均勻,解算的效果就較好[4]。因此,本文選擇“十二參數模型”進行航帶平差處理實驗,在總結航帶平差技術流程的基礎上,進一步分析是否將地面控制點引入平差過程及其產生的結果,考察其對數據內部精度和外部精度的影響。
1 航帶性系統誤差修正方法
機載激光雷達數據的定位系統誤差主要來源于儀器本身的量測誤差、系統與系統之間的整合定標誤差、差分GPS解算誤差以及坐標投影轉換誤差等。這些誤差有的在儀器出廠前就已標定,有的則在飛行掃描前通過定標場定標。但陀螺儀漂移誤差、GPS差分解算誤差和GPS大氣誤差等隨機誤差只能在飛行掃描后通過航帶平差修正。
1.1 航帶平差的數學模型
為消除或改善航帶性系統誤差的影響,必須選擇合適的平差模型和參數對機載激光雷達數據進行航帶平差處理。
本文采用由Burman[5]提出的類似“十二參數平差模型”進行航帶平差實驗,該模型將航空攝影測量的概念引入機載激光雷達掃描系統中,增加了3個平移(˙x,˙y,˙z)和3個旋轉(˙ω,˙φ,˙κ)的線性漂移量,形成了12個參數。此模型要求連接點和控制點的三維坐標必須對應,即

Burman提出的觀測方程式為

式中:λZl為測點值與核檢點值之差;(dXddYddZd)T為偏移量初始值,會隨迭代計算而不斷更新;r,p,h 分別為姿態參數 roll(側滾),pitch(俯仰)和heading(航向);dr,dp,dh 為姿態參數偏移量,會隨迭代計算而不斷更新;dZi,j為高程格網值,會隨迭代計算而不斷更新;為歸一化坐標下周圍四格點的近似值。
1.2 平差流程
機載激光雷達數據航帶平差處理主要流程如圖1所示。
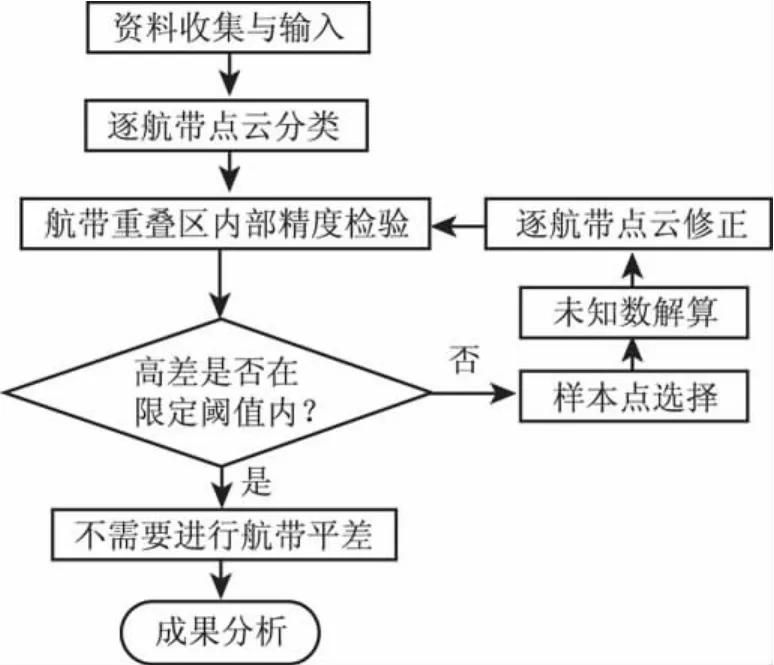
圖1 機載激光雷達數據航帶平差處理流程Fig.1 Airborne LiDAR data strip adjustment process
1)資料收集與輸入。包括含時間序列的航跡信息、點云數據和地面控制點三維坐標等。
2)逐航帶點云分類。航帶平差需依據重疊區內固定點進行,比如地面點。噪聲點和植被點屬于不固定地物,必須逐航帶獨立濾除,否則,重疊區內較高的激光點可能被當作植被點濾除,或者較低的激光點可能被當作噪聲點濾除,造成重疊區數據缺失,無法真實反映航帶之間高差情況。由于激光點云在強度模式下顯示時,房屋特征比較明顯,且數量較少,在平差中又作用關鍵,所以采用人工分類比較合適。
3)航帶重疊區內部精度檢驗。這里的內部精度指航帶重疊區內各航帶數據之間的相對誤差大小。通過查看特征地物(如道路、房屋)剖面的點云,可得到重疊區共軛點之間的距離和高差。不同航帶的點云設置為不同顏色。若高差在閾值范圍內(目前的經驗值為小于5 cm),則不需要進行航帶平差;若存在較大高差,可明顯看出2個航帶的激光點云走向不重合(圖2),則需進行航帶平差。

圖2 航帶重疊區數據的高差Fig.2 The hight difference of overlap data
4)樣本點選擇。針對分類資料,選擇較為可靠且具有代表性的地面、房屋或斜坡作為樣本點,并對其賦予不同的權重。樣本點代表性越強,點云分類越精確,權重設置越大。目前,一般只針對dz(高程偏移量),dr(側滾偏移量),dp(俯仰偏移量)和dh(航向偏移量)為未知參數計算,其他漂移量在短航線測量時可以忽略。根據已有資料對不同參數解算難易程度的分析,航帶間高程方向和側滾方向上的偏移參數dz和dr的解算比較容易實現,在僅有平坦地面的情況下就可以進行;但俯仰和航向偏移參數dp和dh的解算則相對困難,dp的解算需要有飛行方向的斜坡,dh的解算則需同時有飛行方向和垂直飛行方向的斜坡[6]。所以,在選擇樣本點時應盡量滿足上述要求,樣本點的選擇是否適當,直接影響平差效果。
5)未知數解算。利用“十二參數航帶平差”方法迭代計算各姿態參數修正量。解算方式分無地面控制點和含地面控制點2種。首先,在工作區內盡量均勻地選擇航帶重疊區中含有平地、光滑斜坡和房屋等典型地物的區塊,并利用這些區塊創建工程文件,對該工程文件進行飛行姿態偏移(heading,roll,pitch)和掃描鏡尺度(mirror scale)誤差參數解算,并將解算參數應用于全部測區數據的改正,即為工程整體參數解算;然后,將全部測區數據組成區塊性的工程文件,其中可以去除植被覆蓋度過大造成無地面點或地面點稀少區塊的數據,最后,解算每一條航線的高程偏移dz等(也可同時解算側滾偏移量dr)改正參數。
6)逐航帶點云修正。根據解算出的參數修正量,逐航帶進行點云坐標修正。再次檢驗航帶重疊區數據內部精度:若高差滿足要求,表示航帶平差完成;若高差仍超過閾值,可考慮重新選擇樣本點或更改樣本點權重設置等,繼續進行航帶平差,直到平差結果滿足要求。
7)成果分析。對平差后的數據進行分析評價,利用航線重疊區數據評價內部精度,利用地面控制點資料檢測外部精度。這里的外部精度指對比同一地理位置上激光點坐標和地面控制點坐標得到的絕對精度評價結果。
2 實驗區概況與數據
實驗區為湖北省宜昌市秭歸縣城。秭歸縣位于湖北省西部,屬典型的峽江河谷山區縣。實驗區面積為16.63 km2,占5個航帶,共設有11個靜態GPS測量地面控制點(圖3)。激光點云數據由Leica ALS50-II機載激光雷達設備獲取。

圖3 實驗區正射影像及地面控制點分布Fig.3 Orthophoto and ground control points in test area
3 結果分析
對實驗區機載激光雷達數據進行航帶平差的結果(表1)表明,不論航帶平差處理過程中是否引入地面控制點資料,其對數據內部精度的改善效果大致是相同的,無明顯區別。本實驗選擇了區內11個控制點中的 JC03,JC06,JC14 和JC23(圖3),但在進行內部精度評價時沒有采用這4個點的資料,以避免控制點重復使用可能對評價結果的影響。

表1 航帶平差處理前后內部精度評價Tab.1 Internal accuracy evaluation before and after adjustment (m)
但對外部精度評價的結果(表2)為:引入地面控制點之后的均方根誤差為0.119 m,相對于平差之前原始點云的均方根誤差0.1978 m有較大改善;沒有引入地面控制點的均方根誤差為0.218 m,比平差前增大。這說明,不引入地面控制點的航帶平差雖然會改善數據內部精度,但不會提升數據外部精度,甚至造成外部精度的降低;而利用分布合理的適量地面控制點進行平差,不僅能夠改善數據內部精度,其外部精度也可以得到顯著提升。
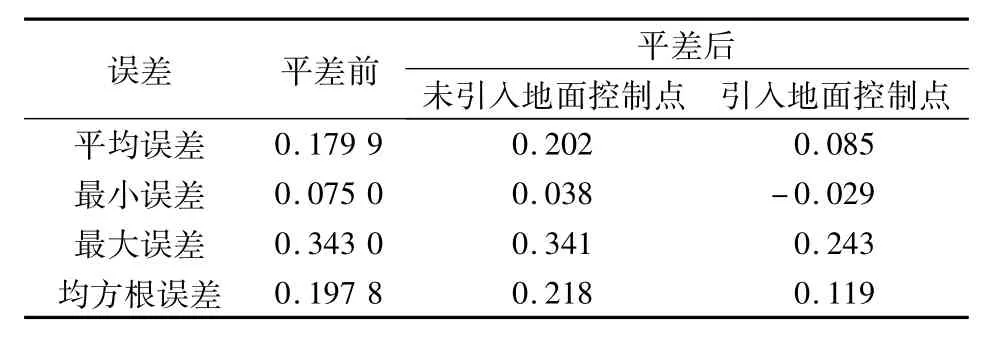
表2 航帶平差處理前后外部精度評價Tab.2 External accuracy evaluation before and after adjustment (m)
4 結論
采用“十二參數模型”的航帶平差方法能夠有效地改善機載激光雷達數據的航帶性系統誤差;在平差過程中,引入適量且分布合理的地面控制點進行平差控制,不僅能夠改善機載激光雷達數據的內部精度,其外部精度也可以得到顯著提升。
[1]張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007.
[2]Crombaghs M J E,Brüegelmann R,de Min E J.On the Adjustment of Overlapping Strips of Laseraltimeter Height Data[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B2):230-237.
[3]Morin K,El-Sheimy N.A Comparison of Airborne Laser Scanning Adjustment Methods[C]//ISPRS WGII/2 Three- dimensional Mapping from InSAR and LiDAR Workshop Proceeding,Banff,Alberta,Canda,2001.
[4]Kilian J,Haala N,Englich M.Capture and Evaluation of Airborne Laser Scanner Data[J].International Archives of Photogrammetry and Remote Sensing,1996,31(B3):383 -388.
[5]Burman H.Adjustment of Laser Scanner Data for Correction of Orientation Errors[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B2):125 -132.
[6]TerraSolid公司.TerraMatch Users Guide[EB/OL].(2011 -01 -12)[2011 -01 -31].http://www.terrasolid.fi.
Airborne LiDAR Strip Adjustment Research:Based on Model Parameters and Ground Control Points Data
WANG Sheng- yao1,2,LIU Sheng-wei1,CUI Xi-min2,GUO Da-hai1,ZHENG Xiong-wei1,LU Xiao1
(1.China Aero Geophysical Survey and Remote Sensing Centre for Land and Resources,Beijing 100083,China;2.China University of Mining& Technology(Beijing),Beijing 100083,China)
Although preprocessing surface point cloud data obtained by airborne LiDAR measurement technique can correct some systematic errors,the output point cloud data may still have some remnants of systematic errors between air stripes.Therefore,the errors must be checked and corrected prior to the utilization of DEM and other related digital products obtained from airborne LiDAR data.This paper thus analyzed several adjustment methods,summed up the technical process of strip adjustment based on the twelve- parameters model,and compared the results of studying the problem whether the ground control points are needed or not after the adjustment.It is shown that adjusting with ground control points can not only improve the internal accuracy but also improve the external accuracy effectively.
airborne LiDAR;strip adjustment;the twelve parameters model
TP 75
A
1001-070X(2012)02-0019-04
2011-09-09;
2011-11-30
中國地質調查局“長江中上游(江津—宜昌段)1∶5萬航空遙感地質調查”項目(編號:1212010911004)及“國土資源部百名優秀青年科技人才計劃”項目資助。
10.6046/gtzyyg.2012.02.04
王圣堯(1987-),女,碩士研究生,主要從事機載激光雷達方法研究。E-mail:sy1987_w@163.com。
(責任編輯:刁淑娟)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
