火炮內膛全景圖像窺測技術研究
2012-12-25 08:48:28傅建平王建成張麗花吳定海
彈道學報 2012年4期
傅建平,雷 潔,王建成,張麗花,吳定海
(1.軍械工程學院 一系,石家莊050003;2.武漢軍械士官學校 四系,武漢430075)
火炮內膛由于多次射擊會出現燒蝕、磨損、裂紋、陽線斷裂、嚴重掛銅與銹蝕等疵病,對火炮發射精度、火炮壽命和使用安全性有很大影響,射擊前必須檢查火炮內膛質量.本文應用半球全景成像與圖像處理技術并結合火炮內膛結構特點研制了火炮內膛窺測裝置,實現了內膛360°的全景環形成像[1],但所采集的環形全景圖像必須展開成傳統的矩形圖像,以便分析處理.
1 火炮內膛窺測裝置
如圖1所示,火炮內膛窺測裝置主要由內膛全景圖像采集裝置、內膛爬行裝置、內膛爬行控制裝置、測控計算機及電纜附件等5部分組成.該火炮內膛窺測裝置在膛內爬行的方向、速度與距離可控,能以攝影與攝像方式采集內膛全景圖像.
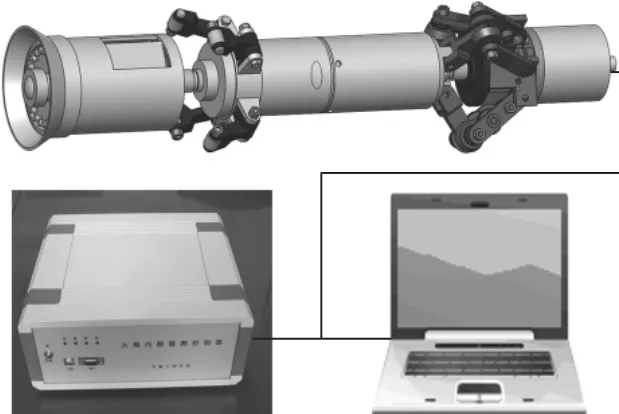
圖1 火炮內膛檢測裝置
2 火炮內膛全景采集
2.1 半球全景鏡頭
圖像采集部分是爬行器在爬行過程中根據需要采集火炮內膛圖像的執行部分,它由半球全景光學鏡頭和CCD光電成像鏡頭2部分組成.
火炮內膛窺測裝置采用的全景環形透鏡(PAL)結構,如圖2所示,它將圍繞光軸360°范圍的圓柱空間投影到二維平面的環形區域.圖中P1和P3為反射面,P2和P4為折射面,L為轉向透鏡,它們共同作用使PAL成像在CCD傳感器上.該系統沿光軸方向的視場角范圍為(-α1,α2).PAL內部成像為環形虛像,在后繼透鏡中轉換為全景環形圖像[2].
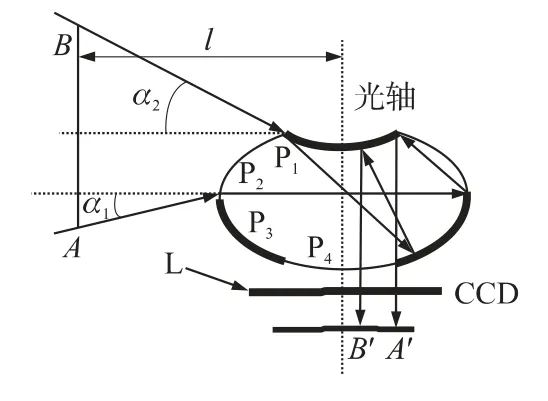
圖2 PAL的結構
圖3中,α角的兩邊繞光軸旋轉360°后得到的空間區域是成像區域[3],像面上每一個同心圓對應與軸成同一角度的點的軌跡;2β角區域為盲區.

圖3 平面圓柱投影法
半球全景鏡頭可一次得到炮膛圓周360°范圍的圖像,而且圖像清晰,分辨率高達1mrad,適用于火炮內膛窺測.
2.2 CCD光電成像鏡頭
CCD將成像于半球全景鏡頭上的內膛圖像轉換成模擬電子圖像.火炮口徑越大,全景圖像中的炮膛內壁面積越大,要求數字圖像分辨率越高.本裝置采用300萬像素CCD鏡頭,在幀速為7s-1,分辨率為2 048×1 536時,采集155mm口徑的火炮,像素實際尺寸高達3.2μm×3.2μm,像素分辨率完全滿足內膛疵病檢測需求.
圖4為采用本文窺測裝置拍攝得到的火炮內膛標定圖像和實際內膛全景圖像,每一圓周對應火炮內膛軸向不同部位的圓周景像,且沿炮膛軸向呈非線性變化.
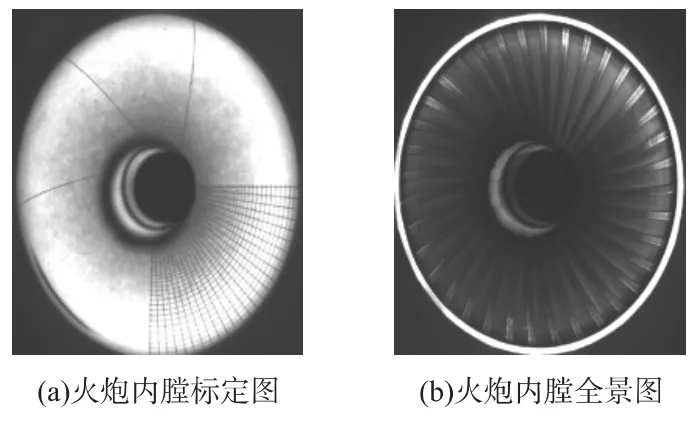
圖4 火炮內膛標定和實際全景圖像
3 火炮內膛全景圖像展開
PAL將一個三維柱面空間成像為二維環形全景圖像,對非專業人員來說,PAL圖像不便于觀察和測量.為此,需要研究展開算法,將環形像轉換成傳統矩形圖像.本文提出的內膛全景環形圖像展開算法分2步:徑向非線性展開和切向非線性展開.
沿光軸將環形像展成矩形像的過程中會出現變形,需要采用算法盡量減小這種畸變.根據圖像特點可采用不同的映射方式來控制,比如最大尺度相同、面積相同等.本文采用的映射方法是將全景圖像沿其外圓周展開,并沿待轉換像素與圓心的切向展開,以保持最大尺寸不變.
3.1 切向矯正
全景環形圖像切向畸變主要表現為切向的彎曲,因此,切向矯正模型可根據坐標變換關系建立.假設經徑向矯正轉換成的圓柱面底面在u—v平面內,則切向矯正如圖5所示.其中,o(uo,vo)為空間圓柱面的中心,也就是全景環形像的中心,W為基準圓環確定的圖像寬度,H為圓柱面高度.
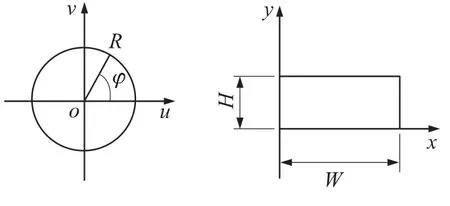
圖5 切向矯正簡圖
根據u—v空間內極坐標與笛卡爾直角坐標系的轉換關系,可得切向矯正模型為[4]

式中,R為展開圓環離中心的距離,φ為旋轉相位.
3.2 徑向矯正
PAL內光線經幾次折反射后成像,其成像過程是非線性的,如圖6所示,由PAL拋物鏡面[3]的結構特點可知,空間點A(觀察對象)指向原點O(觀察點)的射線,映射為與拋物面的交點A′,再把這一點正投影到與Z軸(全景鏡頭的光軸)垂直的固定平面上,得到全景環形圖像點B.
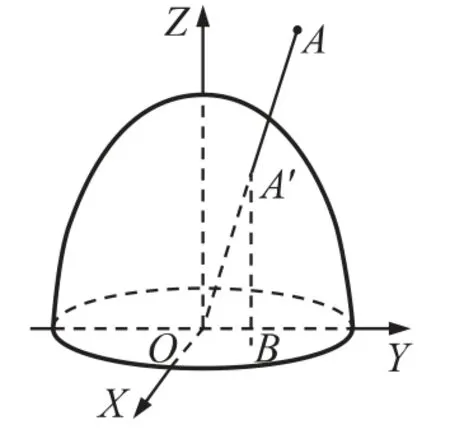
圖6 拋物面透視投影模型
若拋物面透視投影模型參數選取恰當,可以校正全景圖像中的畸變,將火炮內膛全景環形像映射到三維像空間中的圓柱面.
由于拋物面具有旋轉特性,可以把拋物面透視投影模型轉化為二維透視投影,如圖7所示,所形成的全景環形像半徑為r的像圈對應于像空間圓柱面高度為H的圓環.
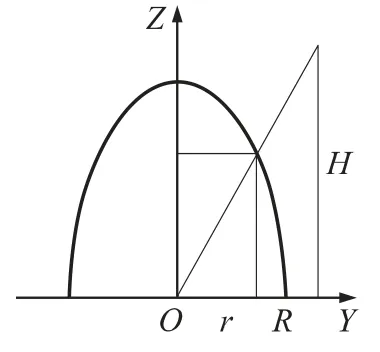
圖7 二維透視投影
根據拋物面的形成原理,可以得出二維透視投影模型為

式中,m、n為徑向畸變參量.只要確定出最優畸變參量{m,n},即可矯正全景圖像失真.遺傳算法(GA)是一種模擬自然界生物進化過程的隨機化搜索算法[5],利用簡單的編碼技術和繁殖機制來表現復雜的現象,被廣泛應用于圖像處理等領域.為此,采用遺傳算法,根據平方和最小優化準則,建立目標函數:

式中,Y為展開圖像像素點的橫坐標,為擬合坐標值.所要求擬合結果評價表達式為

式中,ε為所要求精度,取ε≤0.05%.
4 矩形圖像像素插值
環形圖像經徑向畸變矯正和切向畸變矯正后得到矩形圖像,便于分析處理.但徑向矯正和切向矯正后的像點往往不落在坐標點上,需要根據它周圍原像素的灰度插值得出,使矩形圖像中各像點的亮度值等于全景環形圖像對應點的亮度值.
4.1 雙線性內插法
設環形圖像f(i,j),i∈[1,p],j∈[1,q],如圖8所示,矩形圖像任意點g(x,y)像素值可由環形圖像f(i,j)中4鄰點(a,b)、(a+1,b)、(a,b+1)、(a+1,b+1)的像素值來確定.

式中,

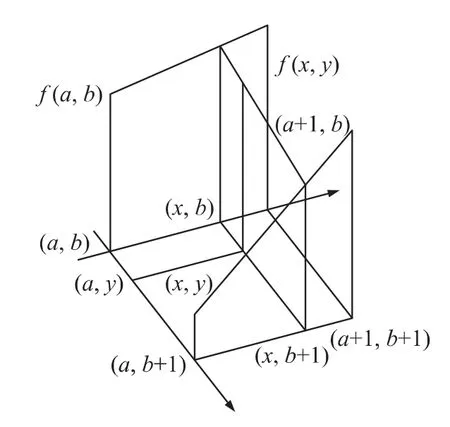
圖8 雙線性插值
4.2 最優參數的三次卷積法
三次卷積法效果好,但計算量大.為了盡可能地減少數據計算量,根據三次卷積的衰減特點優化三次卷積核函數,其核函數[6]為

式中,參數k為樣條函數的衰減速率控制參數.二維圖像空間的三次卷積插值可以使用未知值每邊的4個點,即水平和垂直方向的全部16個網點,如圖9所示.
設二維圖像任意像素點坐標為f(x,y),則重建信號g(i,j)的插值公式為

式中,

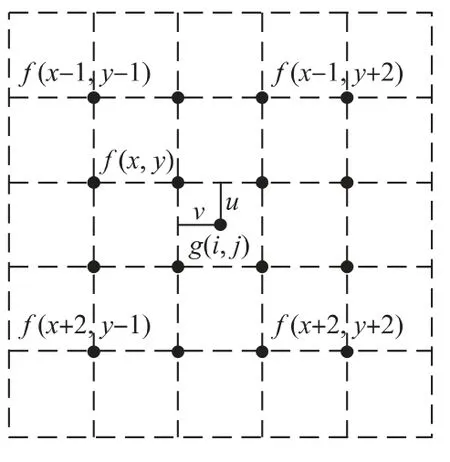
圖9 插值節點示意圖
4.3 自適應插值法
為了得到高質量的矩形全景圖像,并盡可能減少矯正中的數據計算量,根據圖像不同部分的特點,采用自適應插值方法,首先使用canny算子得到邊緣圖像,而后判斷待插值像素點是否為孤立邊緣點或聯通域內的點,若是,則采用最優參數的三次卷積插值,否則,采用雙線性插值,這樣在提高圖像質量的基礎上,也保證了處理速度.
5 展開實例
火炮內膛全景圖像展開前,需先標定:確定鏡頭光學中心位置,消除偏心誤差;確定全景內膛圖像最優畸變參數;確定圖像像素的物理尺寸.標定中,把標有模擬膛線和方格圖組成的圖紙緊貼火炮內壁,圖4(a)為全景環形透鏡拍攝的標定圖.
基于上述校正模型,應用MATLAB編程,通過方格圖的圓弧確定出光學中心的位置,通過模擬膛線得到展開圖的高度,并設定徑向畸變矯正參量{m,n}的范圍,得到標定圖的展開矩形圖像.如圖10所示,經計算驗證,圖中直線斜率與原斜率一致,方格為正方形,校正效果良好.

圖10 標定全景圖及矯正結果
將得到的模型及其參數用于圖4(b)中火炮內膛全景圖像的展開,結果如圖11所示,可以看出,膛線纏角、陰陽線寬度都得到了很好的矯正.
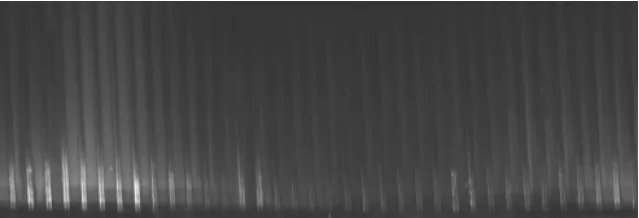
圖11 內膛全景圖及展開結果
6 結束語
基于全景成像的窺測裝置可采集火炮內膛全景圖像,實現火炮內膛的快速窺測.本文從徑向與切向兩方向,將火炮內膛環形全景圖像非線性展開成矩形全景圖像,并通過插值使矩形圖像各點像素值與環形像像素值相等.
采集到的標定圖和火炮實際圖的展開結果表明,該內膛窺測裝置設計合理,展開方法正確,為內膛圖像的后繼分析與處理奠定了基礎,具有很強的實用性.
[1]程惠全,姚煒勇,楊國光,等.全景環形成像的轉像系統設計[J].光電工程,2002,29(2):16-19.CHENG Hui-quan,YAO Wei-yong,YANG Guo-guang,et al.Design of an image transferring system used for panoramic annular imaging[J].Opto-Electronic Engineering,2002,29(2):16-19.(in Chinese)
[2]肖瀟,楊國光,白劍.基于球面透視投影約束的全景環形透鏡畸變矯正[J].光學學報,2008,28(4):675-680.XIAO Xiao,YANG Guo-guang,BAI Jian.Panoramic-annularlens distortion correction based on spherical perspective projection constrain[J].Acta Optica Sinica,2008,28(4):675-680.(in Chinese)
[3]徐瑋,高輝,張茂軍,等.多視點折反射全景成像系統分析與設計[J].系統仿真學報,2010,22(2):435-438.XU Wei,GAO Hui,ZHANG Mao-jun,et al.Design and realization of multi-viewpoint catadioptric omnidirectional imaging system[J].Journal of System Simulation,2010,22(2):435-438.(in Chinese)
[4]朱方明,楊國光,姚煒勇,等.全景環形透鏡環形象的線性化研究[J].光子學報,2001,30(5):590-593.ZHU Fang-ming,YANG Guo-guang,YAO Wei-yong,et al.Linearization of annular image of panoramic annular lens[J].Acta Photonica Sinica,2001,30(5):590-593.(in Chinese)
[5]楊淑瑩.模式識別與智能計算—Matlab技術實現[M].北京:電子工業出版社,2008.YANG Shu-ying.Pattern recognition and mental calculation-Matlab technical realization[M].Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[6]SWAMINATHAN R,GROSSBERG M D,NAYAR S K.Nonsingle viewpoint catadioptric cameras:geometry and analysis[J].International Journal of Computer Vision(S0920-5691),2006,66(3):211-229.
