Keil C51精確延時程序設計
2012-12-17 10:42:06吳挺運林成何
電子科技 2012年12期
吳挺運,林成何
(陜西理工學院物理與電信工程學院,陜西漢中 723000)
C語言具有較強的數據處理能力、語言功能齊全、使用靈活方便、開發效率高,被廣泛應用于在單片機系統開發應用中。在單片機系統開發的過程中,經常需要使用到延時程序,但C語言代碼執行時間的可預見性和實時性較差,在開發一些具有嚴格通信時序要求的系統時,往往需要反復調試延時代碼,給開發者帶來了較大困難。比如使用DS18B20進行溫度測控時,必須按照其單總線通信協議,否則無法讀取溫度數據。針對上述問題,結合Keil C51開發工具和Proteus仿真軟件,介紹在Keil C51開發系統中,利用C語言編寫的延時程序設計及其運行的時間的計算方法[1-2]。
1 常用延時程序的設計方法
1.1 利用定時器/計數器延時
利用C51單片機內部2個16位定時器/計數器實現精確的程序,由于定時器/計數器不占用CPU的運行時間,可以提高 CPU的使用效率。但假設使用12 MHz晶振,定時器工作在方式1模式下,其最長定時時間也只能達到65.53 ms,由此,可以采用中斷方式進行溢出次數累加的方法進行長時間的延時程序設計。但在開發過程中要考慮C51自動對斷點的保護和重裝初值所帶來的延時誤差,也可以使用定時器工作在方式2模式下,減少重裝初值所帶來的誤差。
1.2 利用空操作實現延時
當所需的延時非常短,可以利用Keil C51自帶intrins.h頭文件中的_nop_()函數實現函數延時。
當主程序調用delay()函數時,首先執行LCALL指令,占用2個機器周期,然后執行_nop_()函數,它相當于匯編中的NOP指令,占用一個指令周期,最后執行一個RET返回指令,一共占用5個機器周期。若要增加延時時間,可以在delay()函數中增加_nop_()函數的數目。但利用這種方法進行長時間的延時,會降低成程序的可讀性[3-5]。
1.3 利用C語言中嵌套匯編程序實現延時
與C語言相比,在編寫匯編程序的時候可以清楚地知道執行每一條指令所需的機器周期,從而精確確定其執行時間。Keil C51開發環境可以實現C語言中嵌入匯編語言,可以在延時程序設計時,結合匯編語言的優點,精確確定延時時間。C語言中嵌入匯編程序的方法[6]:
以12 MHz晶振為例,介紹C語言嵌套匯編語言設計延時程序:
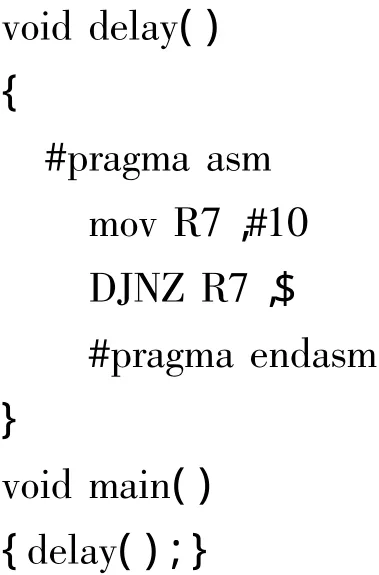
delay函數采用單循環延時,主函數調用delay函數時,首先執行LJMP指令占用2個指令,delay函數執行結束后,執行一個RET返回指令。而DJNZ執行占用2個機器周期,一共執行了10次,所以在12 MHz晶振下,延時函數執行的時間為Δt=2×10+1+2+2=25μs。如果需要進行長時間延時,可以采用多重循環嵌套實現。
1.4 利用for循環實現延時
在單片機開發過程中,for語句和while語句也經常用于延時程序的設計。設晶振頻率為12 MHz,在調用延時函數時,一共需要18個機器周期。當delay函數中的實參改變時,函數的延長時間變長,具體的延時時間Δt=3×i+5×(i+1)+5。由于delay函數中變量的類型為unsigned char,最大值為255,不能進行長時間延時。可以通過改變變量的類型和利用for語句嵌套,實現長時間延時,但是延時時間的計算和delay函數有差異。
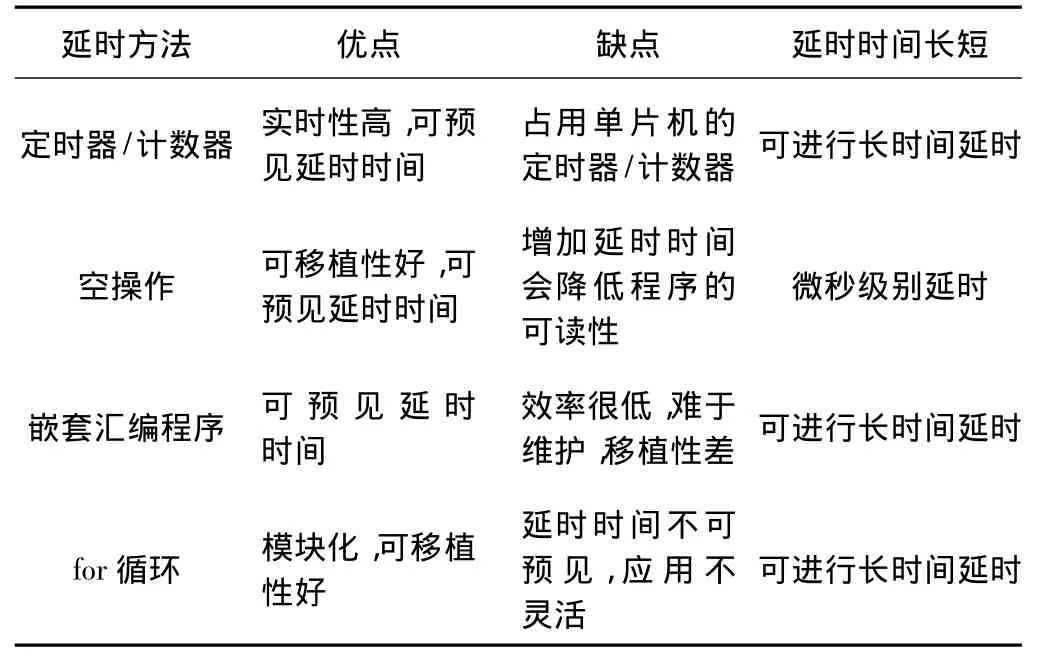
表1 常用延時方法的比較
如表1所示,在設計延時程序時,應該考慮延時的長短,開發系統的資源利用與二次開發等情況進而確定設計延時程序設計的方法。
2 延時時間的精確計算
在開發過程中,經常需要知道代碼執行的時間,以確定延時時間。在單片機開發中經常使用硬件或Keil C51中的一些功能來確定延時時間。下面通過在頻率12 MHz晶振下的一些實例進行分析。
2.1 利用示波器確定延時時間
單片機系統開發應用中,經常用示波器來確定代碼執行的時間,如在延時后面進行IO口中的某位電平翻轉,用示波器來觀察IO中某位輸出的標準PWM波形來確定延時時間,但是此方法必須是用來計算延時時間為毫秒級別的延時程序,否則會存在誤差因為在進行IO口電平翻轉和程序執行結束跳轉到while函數入口,需要占幾μm的時間。例如上面介紹的for循環編寫的延時程序中,假設實參為249,則Δt=3×249+5 ×(249+1)+5=2 002 μs≈2 ms。
將上述代碼經編譯后生成HEX文件,寫入C51單片機中,利用Proteus中的虛擬示波器觀察P1.0后波形的變化。
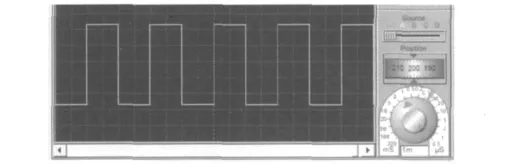
圖1 P1.0輸出波形
從圖1的PWM波形可以看出,高電平或者低電平占的時間分別為2 ms,即為以上延時程序所執行的時間,由于示波器精度的問題,存在誤差為2μs。所以用這種方法確定延時時間,會存在一定誤差。
2.2 利用Keil C51確定延時時間
2.2.1 Keil C51反匯編
對于經驗豐富的開發者,可以利用Keil C51中反匯編的功能,仔細分析C語言轉化成的匯編代碼,從而也可以計算出代碼執行所需的時間,精確得出延時時間。在Keil C51中編寫好程序后,按ctrl+F5進入軟件調試狀態,然后點擊工具欄的view→ disassembly window,即可看到編譯生成的匯編代碼。例如2.1中例子的匯編代碼為:

分析上面的匯編代碼,可以看出調用delay函數時,先執行MOV R7,#0xF9然后執行LACALL跳轉到delay函數的入口處,一共占用3個機器周期。而地址0x000F到0x0013的指令一共被執行了250次,0x0015到0x0016的語句被執行了249次。最后執行RET語句,占用2個機器周期。則delay函數的執行時間Δt=3×249+5×250+5=2 002μs。另外從上述匯編語句中可以看出,P1=P1^0x01相當于匯編中XRL direct,#data指令,占用2個機器周期。
2.2.2 Keil C51軟件調試模式
在開發過程中,還可以利用Keil C51編譯器中的斷點調試功能來模擬執行延時代碼所需的時間。上述舉例進入軟件調試狀態后如圖2所示。
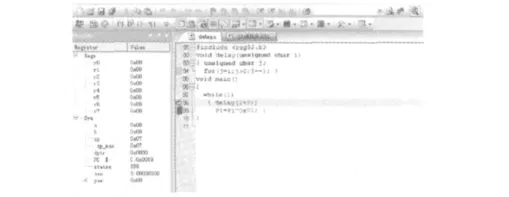
圖2 對延時程序設置斷點
光標為當前程序的停止處,左側的寄存器窗口可以看到一些寄存器名稱及其值。可以通過設置斷點的功能,每遇到斷點,程序會自動停止在斷點處。“sec”中數據的變化即為程序執行處到斷點處所需的時間。對上述程序將斷點設置在“P1=P1^0x01”代碼處,然后點擊全速運行可以得表2所示。
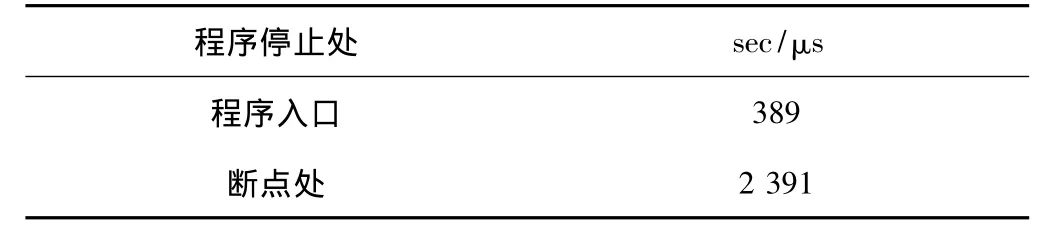
表2 sec顯示時間
從表2可以看出,delay函數執行的時間 Δt=2 391-389=2 002μs,與理論分析結果一樣。
3 應用實例
DS18B20是一款單總線數字式溫度傳感器,對其控制必須按照嚴格的時序要求,有3個重要時序,分別是初始化、讀以及寫時序,時序圖如圖3所示。
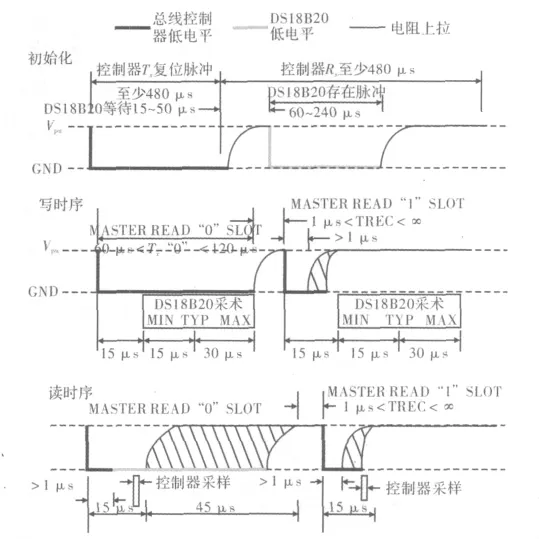
圖3 DS18B20時序圖
由圖3可知,涉及到延時程序的要求為:
初始化。(1)將總線低480~960μs,然后釋放總線。(2)DS18B20等待15~60μs,然后返回低電平并持續60~240μs的存在脈沖。
寫時序。(1)將總線置低電平并且持續15μs后發送數據的某一位。(2)延時60~120μs然后將總線拉高并持續至少1μs的時間后開始下一次發送。
讀時序。(1)將總線置低電平,并且持續至少1μs,然后釋放總線。(2)釋放總線后15μs內讀取并處理數據。(3)處理數據后延時,保證第一個步驟到延時結束時間至少60μs后為電阻上拉狀態。
采用延時程序的設計方法,利用 for循環編寫delay函數和_nop_()函數控制DS18B20。
通過以上延時程序的控制方法,DS18B20穩定實現了溫度采集。充分說明了高效的延時程序設計,在開發一些需要使用到延時程序時,可以先用Keil C51先設計好延時程序,然后利用以上方法進行分析計算,最后直接調用,可節省大量的時間、提高CPU的使用效率[2,7-12]。
4 結束語
Keil C51具有強大的功能,只要利用合理,可以給開發者節省大量的時間,從而提高開發效率。另外在設計延時程序的時候,應該綜合考慮各種延時程序的特點,以優化CPU的使用效率。
[1]LU Chao.Wireless granary temperature and humidity monitoring system[J].Advanced Materials Research,2011(15):1536 -1540.
[2]盛文利.單片機C語言的精確延時程序設計[J].單片機與嵌入式系統應用,2004(10):67-69.
[3]盧超.糧倉無線溫濕度監控系統的設計[J].計算機系統應用,2011(9):161-164.
[4]盧超.分布式無線土壤電導率測量裝置的設計[J].儀表技術與傳感器,2011(8):37-40.
[5]鄧全,李磊,彭鳳超.用Keil C語言實現精確延時的技術研究[J].電光系統,2006(6):37-39.
[6]楊加國.單片機C語言與匯編語言混合變成[J].成都大學學報:自然科學版,2008(9):208-211.
[7]盧超.單片機系統中的抗干擾及可靠性設計[J].儀表技術,2010(2):43-48.
[8]盧超.基于CAN總線分布式礦井溫濕度監測系統[J].煤炭科學技術,2011(9):94-99.
[9]盧進軍.ASP.NET遠程考試系統的設計與實現[J].通化師范學院學報,2006(3):111-113
[10]盧超.禽舍內環境濕度無線監測裝置的設計[J].農機化研究,2011(12):135-138.
[11]盧超.基于AT89C51多路信號檢測和語音報警器的設計[J].佳木斯大學學報:自然科學版,2009(2):181 -184.
[12]Maxim Conpration.DS18B20:programmable resolution 1-wire digital thermometer[M].USA:Maxim Conpration,2008.
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
