基于調頻連續波雷達目標信號處理器研究*
2012-12-10 03:52:34黃燕群蔡睿潔趙進軍
彈箭與制導學報 2012年5期
關鍵詞:信號
黃燕群,黃 勇 ,蔡睿潔,趙進軍
(中國兵器工業第203研究所,西安 7 10065)
0 引言
調頻連續波雷達[1]在近距離動目標航跡跟蹤、地面智能武器系統探測等方面具有很大的優勢。
調頻連續波雷達由前端探測器和目標信號處理器組成。前端探測器完成微波發射與目標反射波接收;目標信號處理器是控制雷達工作方式和動目標解算的重要部件。目標信號處理器的作用:一是提供連續波調制信號;二是解算運動目標的跟蹤軌跡參數,同時把參數發送至系統決策控制單元。隨著雷達探測精度的提高,對目標處理器的要求也不斷的提高,導致要處理的數據量增大,算法更加復雜。因此對目標信號處理器的運算速度、實時性、工作穩定性的要求越來越高。
文中采用高性能定點DSP[2]芯片,搭配FPGA芯片作為處理器的核心芯片,管理雷達啟動、信號采集、數據搬運、解算目標參數的工作時序,以流水線方式處理數據流。DSP芯片完成算法解算、EDMA數據搬運;FPGA管理AD/DA數據轉換、天線掃描控制核,內置FIFO數據緩沖池,協同DSP完成地面動目標跟蹤解算。
1 調頻連續波雷達工作基本原理
首先了解調頻連續波雷達工作原理:調頻式連續波雷達的發射機天線和接收天線是獨立分開的,發射機根據調制信號產生連續高頻等幅波,其頻率在時間上按照調制波的規律變化。
由于動目標的距離、運動改變了反射波的頻率,與發射波比較目標反射波有了變化,目標回波和發射機直接耦合過來的信號加到接收機的混頻器內,在混頻器端輸出了差頻電壓,此時差頻電壓的頻率與目標距離有關,差頻電壓經過放大、濾波處理得到目標信號處理器要處理的中頻信號。
圖1中三角波形實線Ft為發射波,三角波形虛線Fr為目標的反射波,△f為頻偏,Tm為調制信號周期,S為目標中頻信號,Fb-(Fb+)為Ft與Fr的差頻,距離R,光速C與差頻關系如下式:

根據多普勒效應可以求出運動目標的徑向速度:

而目標的角度則采用兩個通道的中頻信號進行和差法求得。
圖1 調頻雷達工作原理
2 目標信號處理器總體設計
目標信號處理器電路涉及模擬弱信號、高速數字信號;同時按指標要求,且需兼顧處理器的功耗、實時性、冗余度、電磁兼容等性能指標,因此在設計原理圖之前,對硬件電路進行全局規劃是必須的,圖2是目標信號處理器的功能模塊圖。
圖2 目標信號處理器的功能模塊圖
工作原理:系統上電,電壓穩定后進入自檢,完成后處于就緒狀態,即低功耗模式;當處理器接收到“啟動”指令后,邏輯控制模塊產生天線掃描控制信號,同時啟動調制波信號模塊、AD采集模塊;當一組天線數據采集完成后,搬運到數據信號處理模塊[3]里的緩沖池,目標解算;最后將動目標參數通過通訊模塊發送至系統決策。
目標信號處理器是軟件算法和硬件電路的結合,而硬件電路則是前提,對其要求也比較高。
2.1 硬件電路設計
文中用DSP、FPGA芯片分別作為數字信號處理模塊和邏輯控制模塊的核心器件。兩者搭配使用既可以發揮DSP的運算速度快,結構成熟穩定,易調試,高效運算復雜數學模型的優點;又發揮了FPGA接口控制靈活,并行運算,定置資源豐富的特點。兩者的結合極大的提高了處理器的整體處理能力。
以下對各功能模塊做簡要的描述。
1)AD采集模塊。采用2個AD9224ARS芯片作為AD轉換芯片,使用差分輸入方式工作(如圖3所示)。
圖3 AD采集電路
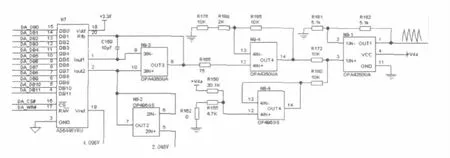
圖4 DA接口電路
在AD芯片前端同時需要增加隔直流、LC慮波、單端轉差放大等措施,來提高信噪比,降低信號在傳輸過程的共模干擾噪聲;而AD的采樣時鐘及量化后的數據則由FPGA控制和保存。
2)調制波信號模塊。調制波信號由DA芯片生產模擬信號,經后端的電壓處理電路而生成。FPGA控制AD5445YRU芯片的波形數據輸入以及時鐘、讀/寫等信號;AD5445YRU芯片輸出端設置電壓加法器、有源多級濾波器等處理電路,將電壓信號的幅值調整到相應的范圍,電路如圖4所示。
3)邏輯控制模塊。邏輯控制模塊選用型號為EP3C55[4]的 FPGA芯片為主控制芯片,完成以下功能:
?內置32位數據總線接口與DSP連接;
?控制AD/DA轉換、FIFO滿中斷、天線掃描等控制信號;
?定制FIFO數據緩沖結構。
采用32位數據總線接口,一次DSP讀操作完成兩個通道數據的讀取,增加吞吐量;內置FIFO形成乒乓結構起數據緩沖的作用,以至不會打斷流水線作業,FPGA單周期工作流程如圖5所示。
FPGA接到啟動指令后,開始發送掃描天線,控制DA/AD轉換,當FIFO的數據量到設定值時產生中斷,通知DSP搬運數據,搬完后進入下一次啟動等待。
4)數字信號處理模塊。數字信號處理模塊是雷達數據處理[4]的關鍵部件。文中采用TI公司的DSP芯片TMS320C6455[5],屬于最新定點處理器,相比較以往6000系列具有更多的優點:最高頻率1.2GHz;內部的RAM空間2MByte;支持DDR2的外部接口總線。
為讓高主頻的DSP發揮出最大的處理能力,需要減少CPU存取數據的時間和減少被低速外設打斷的次數。
為此,首先DSP上電啟動Bootloader之后,把程序代碼拷貝到RAM內部里面,減少讀取程序的時間;其次,DSP以EDMA方式搬運采樣數據,搬運數據和CPU處理算法可以并行處理;另外,L2內存區內置兩個數據緩沖池流水線方式處理數據;最后是把低速外設交給FPGA管理。
考慮軟件算法以后的升級,TMS320C6455芯片有專門的 DDR2[6]接口管腳,外接兩片 MT47H64M16 DDR2芯片構成32位DDR2內存,此時雷達數據的緩沖可以設置在DDR2里面,讓L2 RAM只用作程序代碼空間,從而提高運行速度。
通訊模塊里由DSP的McBSP通道設置成SPI方式;外部接MAX3100芯片把SPI轉換成UART方式。數字信號處理模塊完成動目標軌跡解算后,以串口方式把動目標的參數發送給控制系統實施攻擊。
5)電源管理模塊。電源管理是高速信號處理板的重要部分,電源的電磁兼容性、紋波大小直接系統影響目標信號處理器的各種性能指標,目標信號處理器的電磁兼容有以下特征:
?DSP芯片與外部DDR2總線的運行主頻比較高,易形成電磁干擾;
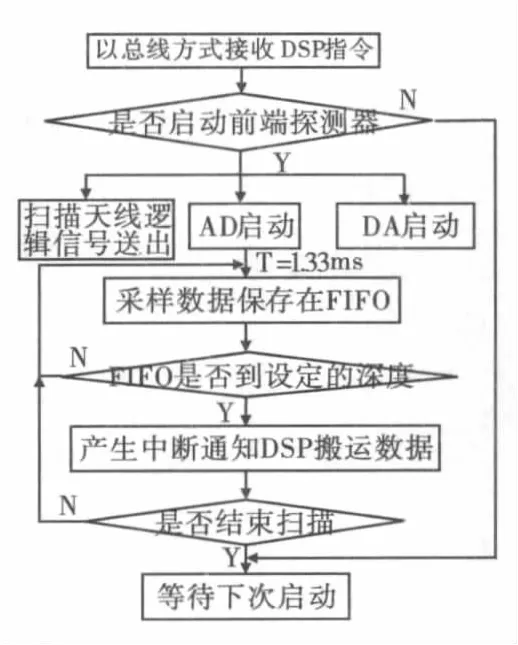
圖5 FPGA單周期工作流程
?算法對疊加在模擬信號上的噪聲比較敏感,易受干擾;
AD、DA芯片內部數字地和模擬地是連通的,工作時鐘信號容易干擾AD前端(DA后端)的模擬信號。當時鐘信號通過耦合方式混疊在模擬信號時,由于疊加干擾噪聲將出現混頻現象,引起解算后出現“野點”,導致目標航跡跟蹤失敗。
因此,需從以下幾方面考慮抑制電磁干擾:
?數字/模擬電源和地分開走線,選擇恰當的共地點;
?模擬電源利用DC/DC電源芯片與線性電源兩級串聯結合供電,既起到降低功耗,又降低電源噪聲的效果;
?AD、DA芯片數字地、模擬地分別用磁珠連接,設置地壕溝防止數字信號電流經過模擬地回流;
?設計上電時序控制電路,控制端口電壓、核電壓、鎖相環電壓上電時序,避免因上電時序錯誤造成的啟動失敗;其次控制系統的上電就緒時間;最后是防止上電瞬間電流過大(電源芯片以電荷泵方式工作和FPGA程序沒有加載程序導致用的電流較大),拉低系統電壓,導致其它部件多次復位。
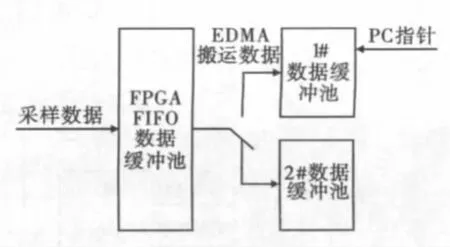
圖6 流水線工作原理簡圖
2.2 流水線處理數據
為了實現流水線方式,需要在DSP的L2級RAM(2Mbyte)設置2個數據緩沖區,保存上、下組天線掃描的數據,容量根據
采樣數據的大小而定;同時在FPGA設置個乒乓結構FIFO數據緩沖池,如圖6所示。
流水線工作方式:
1)首先DSP啟動初始0組“開始指令”采集一組數據放置1#池;
2)接著DSP發送第1組“開始指令”,之后DSP處理1#數據,采集工作同時進行;
3)第1組數據存放在2#池;
4)接著DSP發送2組“開始指令”,之后DSP處理2#數據;
5)第2組數據存放在1#池;
6)重復2)步驟。
直到接收到控制系統“結束掃描”指令,跳出循環。
目標信號處理器的軟件流程如圖7所示,動目標跟蹤算法做成函數形式供主程序調用。跟蹤算法主要涉及數字慮波、FFT快速傅里葉變換、卡爾曼航跡預估算法;其中利用周期內FFT變換和多個三角波周期平均的方法解算出動目標的點跡參數,再以此點跡為數據進行卡爾曼航跡預估,求解跟蹤軌跡。
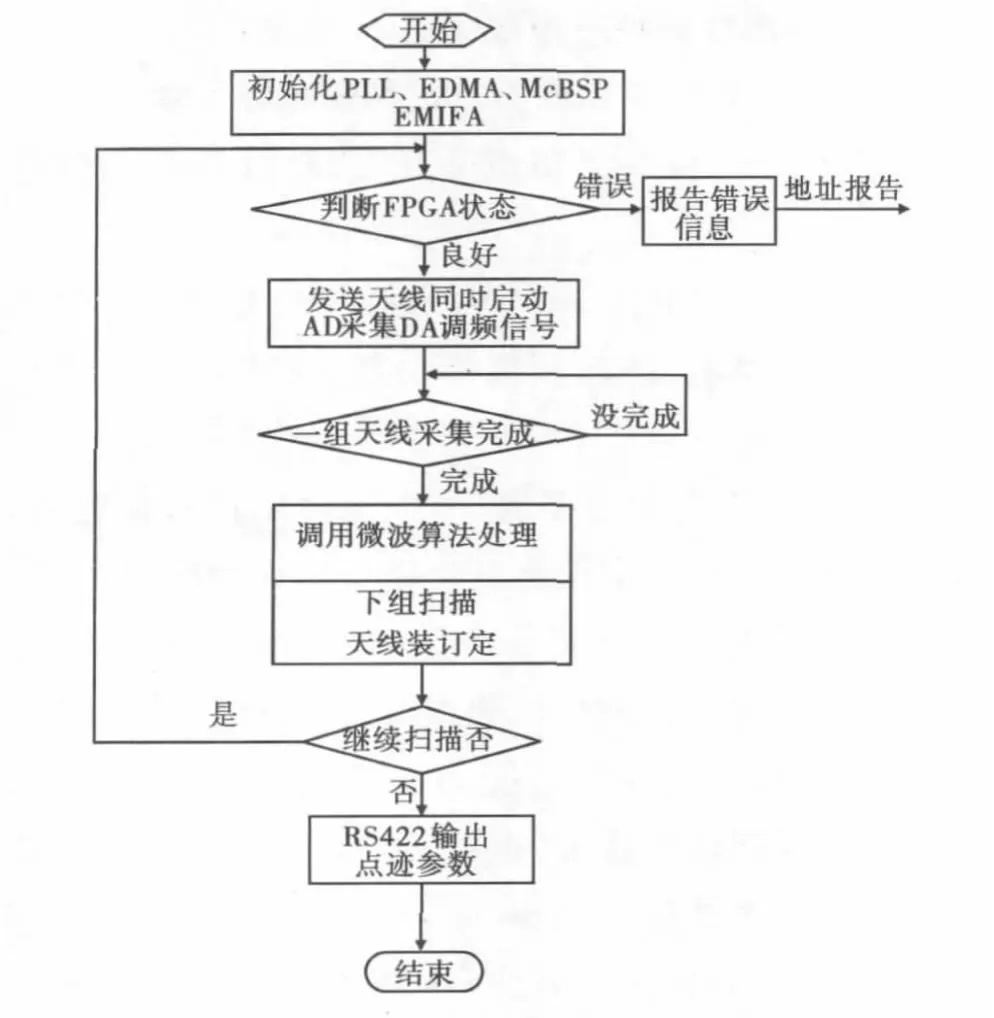
圖7 DSP內部流程圖
3 試驗結果
試驗環境情況:在動目標(汽車)上安裝 GPS定位系統,雷達探測器放在公路的旁邊,目標在400mm處,以30km/s速度向探測器方向行使,雷達進行單周16個天線組掃描,目標信號處理器把解算出來點跡、跟蹤參數、GPS定位數據同時輸出到記錄裝置,結果如圖 8所示。
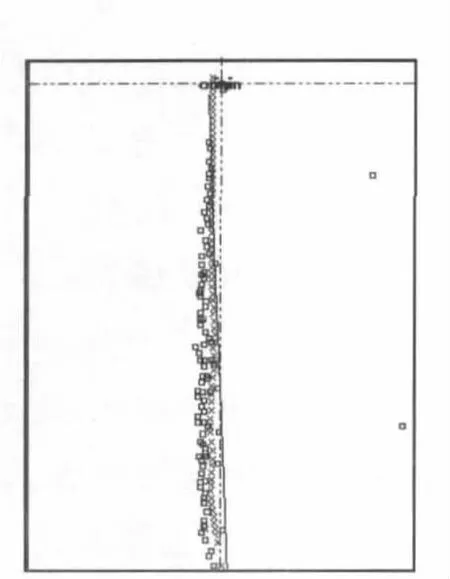
圖8 動目標點擊、航跡及GPS圖
在圖8中左邊‘□’表示動目標的點跡;中間‘×’表示動目標的跟蹤軌跡;右邊直線表示GPS探測到目標運動軌跡。
圖8中看出“野點”很少,零散的“野點”分布不影響跟蹤軌跡擬合,效果比較理想。
但存在不足之處:一是在目標距離較遠時,點跡分布比較散;二是跟蹤軌跡與GPS測量的真實軌跡之間存在固定角度誤差。分析其原因:1)距離較遠時采樣信號幅值減弱,信噪比下降;2)測角用到和差法計算,兩通道的不平衡性造成小角度系統誤差。這部分工作進一步完善硬件電路和軟件算法數據補償后,將會取得良好的效果。
4 結論
文中目標信號處理器的設計方案具有實時性強、結構合理、工作穩定、方便硬件升級等優點;試驗表明:動目標軌跡探測試驗顯著,在工程上能夠進一步推廣,滿足地面近距離動目標探測系統。
[1]丁鷺飛,耿富錄.雷達原理[M].3版.西安:西安電子科技大學出版社,2005.
[2]于風芹.TMS320C6000 DSP結構原理與硬件設計[M].北京:北京航空航天大學出版社,2008.
[3]黑蕾,程剛.基于某測高雷達的數字信號處理器研究[J].彈箭與制導學報,2009,29(3):269 -272.
[4]何友,修建娟,張晶煒,等 雷達數據處理及應用[M].北京:電子工業出版社,2006.
[5]MS320C6455 Fixed-Point Digital Signal Processor[M].TI公司.
[6]TMS320C645x DSP DR2 Memory Controller Use’s Guide[M].TI公司.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06