彈載相控陣雷達視線重構(gòu)研究*
2012-12-10 03:52:12楊雅君徐勝利李曉東
彈箭與制導學報 2012年5期
楊雅君,徐勝利,李曉東,廖 瑛
(1國防科技大學航天與材料工程學院,長沙 410073;2上海機電工程研究所,上海 200233)
0 引言
彈載相控陣雷達是相控陣技術(shù)在導引頭領(lǐng)域的應(yīng)用,其特點是采用電掃描代替機械掃描,天線波束的切換掃描速度遠大于機械方式[1]。而且雷達與導彈彈體固聯(lián),只能直接獲取相對彈體坐標系的視線角信息[2]。攔截導彈通常采用比例導引規(guī)律,必須獲得慣性系下導彈-目標視線角速率信息,為獲取慣性視線角速率,理論上可以在捷聯(lián)穩(wěn)定算法的基礎(chǔ)上,通過坐標變換得到慣性視線角,然后采用微分網(wǎng)絡(luò)獲取慣性視線角速率[3]。但該方法會造成噪聲放大,并且忽略體視線角和彈體姿態(tài)的二階動態(tài),使得重構(gòu)性能受導引頭采樣頻率的制約[5]。所以目前國內(nèi)外的研究大多關(guān)注于采用卡爾曼濾波方法來估計目標視線角速率[4-10],這些文獻集中于研究被動導引頭“僅測角”(angle/bearing-only measure)條件下的狀態(tài)估計,而未充分利用主動雷達導引頭所能提供的相對距離和距離變化率信息。
針對上述問題,文中引入距離和距離變化率信息,重點研究彈-目相對運動模型和測量模型的建模問題以及系統(tǒng)的可觀測性分析,并應(yīng)用UKF濾波進行狀態(tài)估計,并根據(jù)狀態(tài)的估計值重構(gòu)視線角速率。最后給出仿真結(jié)果,驗證方法的性能。
1 問題分析
彈載相控陣雷達能夠測量的信息包括:導彈-目標相對距離R;相對速度R·;彈上視線高低角λz和彈上視線方位角λβ。慣導系統(tǒng)輸出彈體系下導彈旋轉(zhuǎn)角速率分量 ωx、ωy、ωz,線加速度分量 ax、ay、az。視線角重構(gòu)的任務(wù)是,根據(jù)上述測量信息,重構(gòu)出高精度的慣性視線高低角qz和慣性視線方位角qβ,及其角速率和。必要的坐標系在表1中列出,坐標系間的幾何關(guān)系如圖1所示。

圖1 坐標系間的幾何關(guān)系

表1 坐標系定義
2 系統(tǒng)建模及分析
2.1 導彈 -目標相對運動模型
設(shè)目標與導彈在SI系下運動狀態(tài)分別為xT和xM,定義導彈-目標相對運動狀態(tài)為x=xT-xM,并假設(shè)機動目標模型為singer模型,則相對運動狀態(tài)方程為:

式中:
x(k)=[x(k)x˙(k)x¨(k)]T,
ux(k+1)為確定性輸入,且:
u(k+1)=Ga˙x(k)=[T3/6 T2/2T]Ta˙x(k)
a˙x(k)為導彈在SI系下加加速度,可根據(jù)由彈體角速度和線加速度計算:
wx(k+1)為白噪聲序列,其協(xié)方差矩陣為:

α為機動頻率,轉(zhuǎn)彎機動時α=1/60,逃避機動時α =1/20,大氣擾動下α =1,當αT足夠小時,有:
式(1)描述了導彈和目標在穩(wěn)定坐標系SW系中的一維運動過程,則其三維狀態(tài)方程為:

式中:

2.2 測量模型
利用彈上方位角λβ、高低角λz、距離R可以得到目標在SW系下坐標為:
考慮相對速度作為觀測量,則觀測方程為:

式中:[Y(k)=x(k)y(k)z(k)R·(k)]T;


其中:

2.3 系統(tǒng)的可觀測性分析
系統(tǒng)的可觀測性分析包括兩方面的內(nèi)容,一是確定系統(tǒng)狀態(tài)是否完全可觀,二是確定系統(tǒng)的可觀測度(DOO)。
不考慮模型誤差和測量誤差,文中所述系統(tǒng)的連續(xù)狀態(tài)方程和測量方程可分別表示為如下形式:

式中,f(r,v,a)是由導彈制導系統(tǒng)和目標機動模式?jīng)Q定的非線性函數(shù),在離散化的濾波狀態(tài)方程中假設(shè)為高斯噪聲。
對于非線性系統(tǒng)的可觀性分析,通常利用李導數(shù)定義可觀性矩陣[9]。由于 f(r,v,a)均值為零,根據(jù)李導數(shù)定義,式(5)所述系統(tǒng)的各階李導數(shù)為:

由于 ?L1/?r、?L2/?r、?L2/?v的表達式過于復雜,考慮版面有限,文中略寫其具體表達式。由李導數(shù)定義的可觀測陣為:

易求得可觀測矩陣的秩rank(Q)=9,所以系統(tǒng)完全可觀。
對于系統(tǒng)可觀測度的分析,一種方法是在Kalman濾波結(jié)束后對估計誤差協(xié)方差矩陣進行分析[10],得到可觀測度定量的分析結(jié)果。另一種方法是將可觀測矩陣進行奇異值分解(SVD),并對得到的奇異值進行分析[11],得到系統(tǒng)可觀測度定性的分析結(jié)果。鑒于可觀測度是系統(tǒng)本身的性質(zhì),與濾波過程無關(guān),所以文中采用第二種方法進行研究。
根據(jù)矩陣分析理論中的“條件數(shù)”定義系統(tǒng)的可觀測度[12]:

其中:σmax(Q)和σmin(Q)分別為可觀性矩陣的最大和最小奇異值;Cond(Q)為定義的可觀性矩陣的條件數(shù),條件數(shù)越大,意味著可觀性矩陣的行向量或列向量的獨立性越弱,系統(tǒng)的可觀測程度越低。
由于式(5)所確定的可觀性矩陣表達式過于復雜,所以需要采用數(shù)值計算進行分析。固定r、v、a中的任意兩組狀態(tài),計算剩余的一組狀態(tài)變化時條件數(shù)的取值,可分析系統(tǒng)可觀測度的變化規(guī)律。表2中給出了不同的相對距離、速度、加速度對應(yīng)下,可觀測矩陣條件數(shù)的計算結(jié)果。
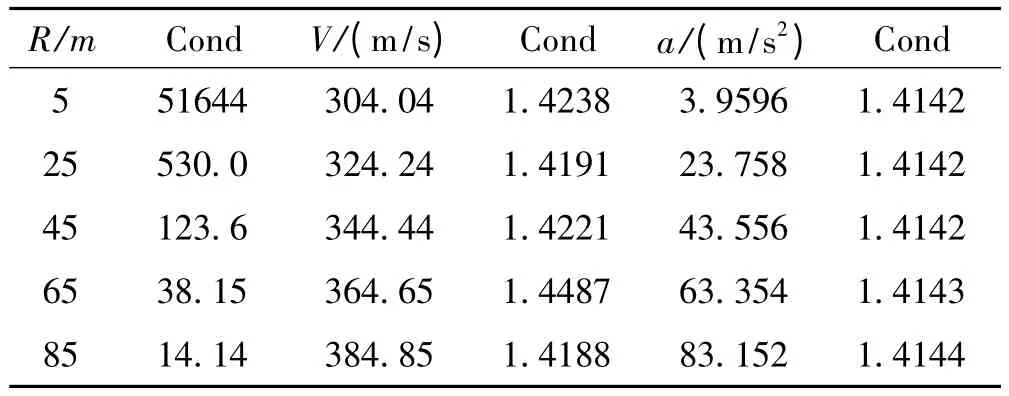
表2 可觀測性條件數(shù)計算結(jié)果
從表2中可以發(fā)現(xiàn),相對速度和加速度對系統(tǒng)的可觀測度影響不大,且條件數(shù)變化無明顯的規(guī)律性。相對距離對可觀測度影響很大,且條件數(shù)隨著相對距離的減小而急速增大,說明攔截末期系統(tǒng)的可觀測性將嚴重惡化。
3 基于UKF的視線重構(gòu)方法
式(2)和式(3)組成的狀態(tài) -觀測系統(tǒng)中,由于觀測方程含有非線性項 R·,鑒于無跡卡爾曼濾波(unscented Kalman filter,UKF)方法對非線性系統(tǒng)狀態(tài)估計具有較高的精度和廣泛的適用性,并且不必求取雅克比(Jacobian)矩陣或海瑟(Hessian)矩陣,具有更簡單的計算過程[7]。所以文中采用UKF對相對運動狀態(tài)進行估計。
3.1 初值選取
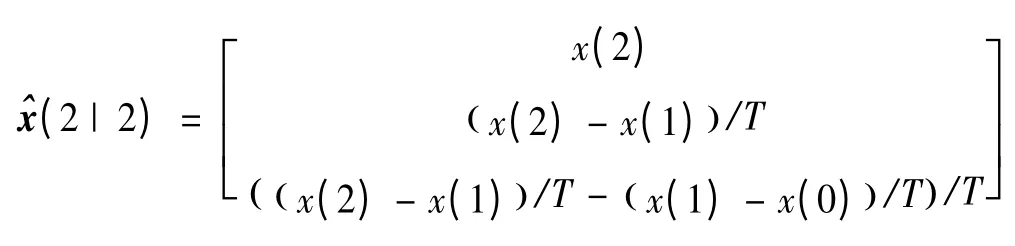
根據(jù)目標在SW系中的測量坐標[ ]x y zT,并考慮系統(tǒng)狀態(tài)向量包括了位置、速度和加速度共三階狀態(tài)量,所以狀態(tài)初值需用前三個采樣時刻測量值確定:
測量坐標[ x y z]T的噪聲協(xié)方差矩陣如式(4)所示,假設(shè)其元素為rij,則初始狀態(tài)協(xié)方差矩陣為:

其中子矩陣Pij為:

3.2 UKF 濾波
UKF濾波過程由以下6個遞推步驟完成:
1)計算2n+1個sigma點及其權(quán)重;
2)狀態(tài)值預(yù)測;
3)觀測值預(yù)測;
4)測量更新,更新協(xié)方差矩陣Pyy和Pxy以及計算濾波增益矩陣K(k);
5)狀態(tài)更新;
6)協(xié)方差矩陣更新。
UKF濾波是一種常用的非線性系統(tǒng)濾波方法,其具體遞推公式在眾多文獻[5,7,13-15]中有詳細的介紹,文中不再贅述。
3.3 視線角速率重構(gòu)方法
穩(wěn)定系下導彈-目標相對運動狀態(tài)量與慣性視線角qβ、qz和視線角速率˙qβ、˙qz間存在下列關(guān)系:

綜上所述,文中所使用的角速率重構(gòu)方法可用圖2所示的系統(tǒng)框圖表示。利用相對運動狀態(tài)量重構(gòu)角速率的方法不僅可避免使用微分網(wǎng)絡(luò),并且考慮了相對運動的二階狀態(tài)量,可以有效減少視線角速率提取的滯后性。
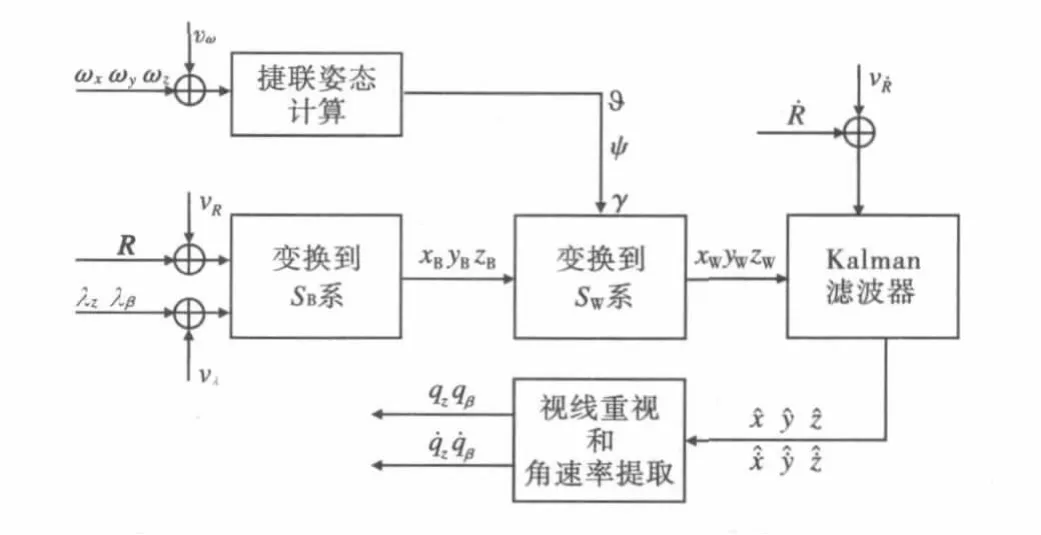
圖2 基于狀態(tài)估計的視線角重構(gòu)系統(tǒng)
4 仿真驗證
4.1 目標機動軌跡和攔截彈道的獲取
根據(jù)文獻[8]建立的導彈飛行力學模型,并取目標機動加速度變化規(guī)律為:

fix(·)為零向取整函數(shù),機動時間常數(shù)τ=5s。
利用Matlab/Simulink編制導彈六自由度彈道仿真程序進行數(shù)值計算,獲得攔截彈道數(shù)據(jù)。彈道曲線如圖3所示。

圖3 攔截彈道曲線
攔截過程中,導引規(guī)律取有效導航比N=4的修正比例導引律。初始時刻,導彈位置[ 0 11 0 ]km,姿態(tài)角 γ =0°、ψ = - 30°、? =30°,速度 Vm0=3.5Ma;目標位置[ 1 0 10 0 ]km,速度VT=300m/s,初始航向 ψcT= - 90°、θT=0°。
由攔截彈道與目標航跡的數(shù)據(jù)可以計算相控陣雷達和慣導系統(tǒng)測量信息的真值,加上白噪聲則為測量數(shù)據(jù),噪聲的標準差取值分別為:σR=20m,σ·R=1.5m/s,σλ=0.2°,σω=1°/s,σa=0.1g。根據(jù)測量數(shù)據(jù)并采用文中提出的重構(gòu)方法和濾波算法可以實現(xiàn)對機動目標的慣性視線角速率重構(gòu)。
4.2 重構(gòu)結(jié)果
假定導引頭數(shù)據(jù)采樣周期為12ms,慣導系統(tǒng)與彈上控制系統(tǒng)的控制步長為3ms,設(shè)置濾波算法的遞推步長與導引頭數(shù)據(jù)采樣周期相同。根據(jù)式(2)、式(3)及UKF濾波算法,在穩(wěn)定坐標系SW下對彈-目相對運動狀態(tài)進行濾波。將狀態(tài)量的濾波結(jié)果代入式(7)、式(8),以視線仰角通道為例,重構(gòu)結(jié)果如圖4和圖5所示,分別給出了濾波收斂過程中視線仰角和角速率的重構(gòu)值與真值的變化曲線。

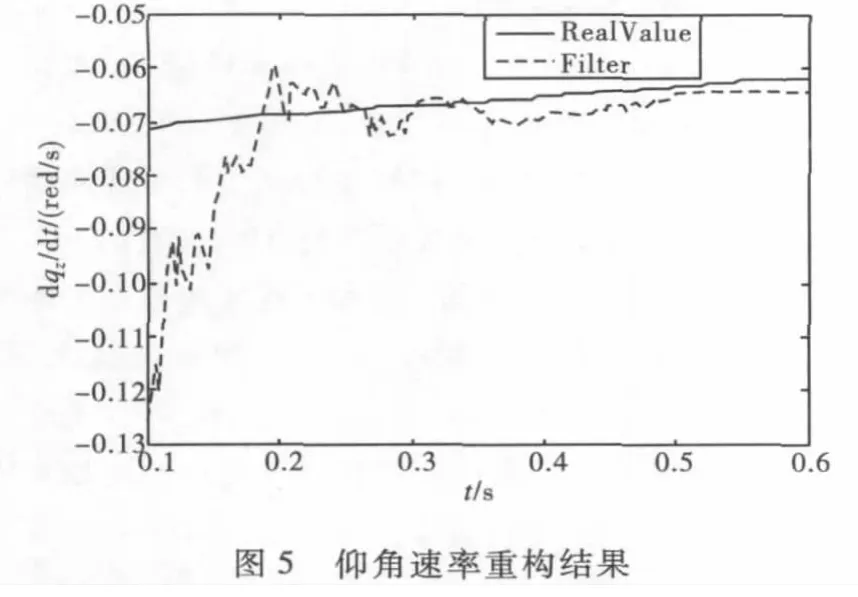
可以看出,濾波收斂速度很快,收斂后重構(gòu)值能較精確的逼近真值并反映真值的變化趨勢。
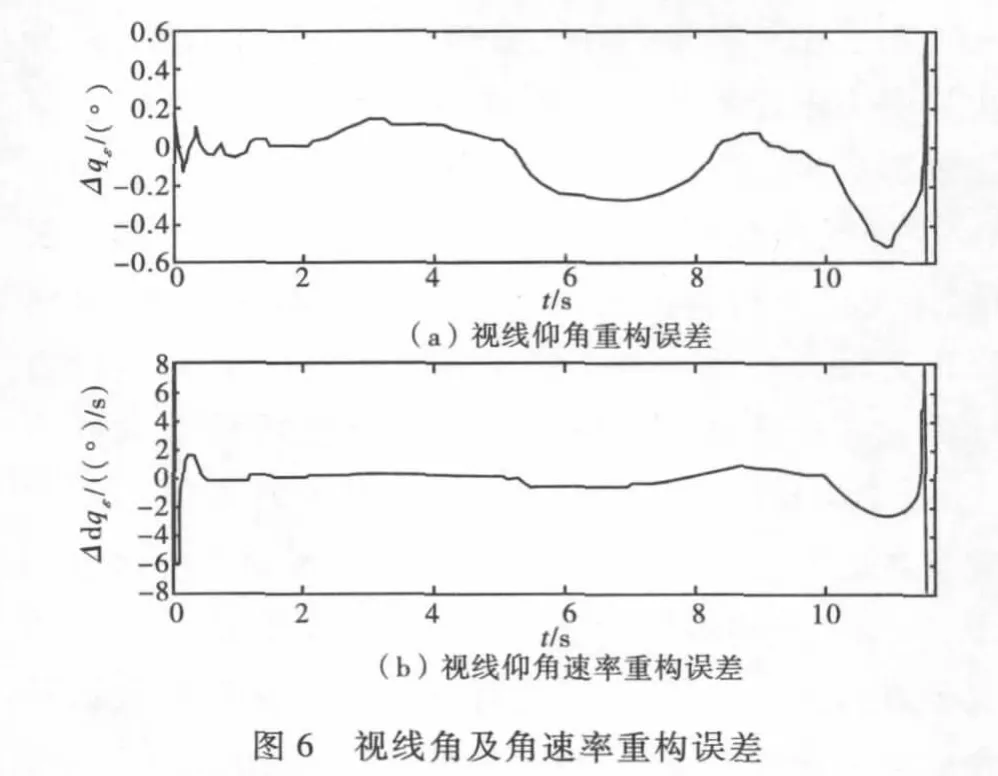
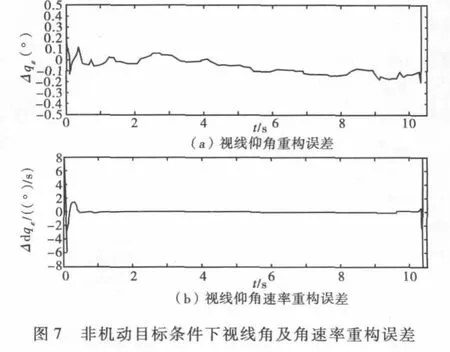
為考察攔截全過程視線重構(gòu)的性能,將重構(gòu)值與測量真值相減,得到重構(gòu)誤差。圖6給出了攔截全過程視線仰角和角速率重構(gòu)誤差的變化圖。可以看到,濾波穩(wěn)定后視線角重構(gòu)誤差曲線出現(xiàn)有偏波動,且導彈與目標越接近誤差波動越大。視線角速率重構(gòu)誤差曲線也表現(xiàn)出類似的情形,并在攔截末段尤為明顯。為分析上述情況出現(xiàn)的原因,又進行了對非機動目標的攔截仿真,結(jié)果如圖7所示。
很明顯,在非機動目標條件下,文中所提出的重構(gòu)方法基本上是無偏重構(gòu),但在攔截末段重構(gòu)誤差也出現(xiàn)增大的現(xiàn)象。所以,可以確定,圖6中出現(xiàn)的誤差偏移源于目標機動,準確的說,是由于濾波模型中目標動力學模型不匹配造成的失調(diào)。而攔截末端重構(gòu)誤差增大的現(xiàn)象,也印證了可觀測性分析得出的距離越小系統(tǒng)可觀測性越差的結(jié)論。
4.3 方法對比
采用傳統(tǒng)的基于微分網(wǎng)絡(luò)的視線角重構(gòu)方法進行計算,其中,對通過微分網(wǎng)絡(luò)提取的視線角速率信息,通過5階低通濾波器進行濾波,截斷頻率為20rad/s,圖8以視線仰角速率為例,對真值、微分網(wǎng)絡(luò)重構(gòu)值和狀態(tài)估計重構(gòu)值進行了對比。
可以看出,文中的方法與傳統(tǒng)方法相比,具有更好的視線角速率重構(gòu)能力。
5 結(jié)論
文中在傳統(tǒng)視線角速率重構(gòu)方法的基礎(chǔ)上,提出一種基于相對狀態(tài)估計的重構(gòu)視線角速率方法,并分析導引頭跟蹤系統(tǒng)的可觀測性。根據(jù)彈載相控陣雷達觀測數(shù)據(jù),實現(xiàn)了對機動目標狀態(tài)的實時準確估計,并重構(gòu)出高精度的慣性視線角速率。仿真結(jié)果表明:新方法對傳統(tǒng)方法的改進是有效的,重構(gòu)結(jié)果精度得到較大提高。該方法不足之處是需要對目標機動模式進行建模,在目標進行機動時,可能造成濾波失調(diào),重構(gòu)精度下降,另外文中未研究對彈體姿態(tài)運動參數(shù)的濾波,由于姿態(tài)測量噪聲加入到視線角重構(gòu)中,影響了重構(gòu)精度。如何在目標機動模式改變的情況下進行精確預(yù)估,以及設(shè)計彈體姿態(tài)運動濾波器是今后繼續(xù)研究的方向。
[1]高烽.相控陣導引頭的基本特點和關(guān)鍵技術(shù)[J].制導與引信,2005,26(4):1-5.
[2]何慶強,王秉中,殷忠良,等.導引頭共形相控陣天線新技術(shù)[J].系統(tǒng)工程與電子技術(shù),2006,28(12):1816-1819.
[3]高峰,周輝.一種捷聯(lián)式數(shù)字角信息處理系統(tǒng)[J].制導與引信,2000,21(4):1-11.
[4]周瑞青,呂善偉,劉新華.捷聯(lián)式天線平臺的角跟蹤系統(tǒng)設(shè)計[J].系統(tǒng)工程與電子技術(shù),2003,25(10):1200-1202.
[5]林喆,姚郁,富小薇.捷聯(lián)成像尋的器視線重構(gòu)[J].光電工程,2006,33(3):40-53.
[6]Bertil EKSTRAND.Tracking filters and models for seeker application[J].IEEE Transactions on Aerospace and E-lectronic Systems,2001,37(3):965 -977.
[7]R R Allen,S S BLACKMAN.Angle-only tracking with a MSC filter[C]//Digital Avionics Systems Conference,IEEE,1991.
[8]Won-Sang RA,Ick-Ho WHANG.A robust horizontal LOS rate estimator for 2-Axes gimbaled seeker[C]//Proceedings of the 41st IEEE Conference on Decision and control,IEEE,2002:2884 -2889.
[9]Jacques WALDMANN.Line-of-sight rate estimation and linearizing control of an imaging seeker in a tactical missile guided by proportional navigation[J].IEEE Transactions on Control Systems Technology,2002,10(4):556 -567.
[10]Branko Ristic,M Sanjeev Arulampalam.Tracking a manoeuvring target using angle-only measurements:algorithms and performance[J].Elsevier,Singal Processing,2003,83:1223 -1238.
[11]Titterton D H,Weston J L.Strapdown inertial navigation technology[M].London:The Institution of Electrical Engineers,2004.
[12]Julier S J,Uhlmann J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(12):1958.
[13]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2006.
[14]黃翔宇,崔平遠,崔祜濤.深空自主導航系統(tǒng)的可觀性分析[J].宇航學報,2006,27(3):332-337.
[15]Ham F M,Brown T G.Observability,eigenvalues,and Kalman filtering[J].IEEE Transactions on Aerospace and Electronic Systems,1983,19(2):269 -273.
[16]程向紅,萬德鈞,仲巡.捷聯(lián)慣導系統(tǒng)的可觀測性和可觀測度研究[J].東南大學學報,1997,27(6):6-10.
[17]高社生,王海維,倪龍強.局部可觀測理論在慣性系統(tǒng)快速傳遞對準中的應(yīng)用[J].中國慣性技術(shù)學報,2007,15(6):642 -645.
[18]孫福明.機動目標跟蹤狀態(tài)估計與數(shù)據(jù)關(guān)聯(lián)技術(shù)的研究[D].合肥:中國科學技術(shù)大學,2007.
[19]Vaddi S S,Menon P K.Target state estimation for integrated guidance-control of missiles[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,AIAA,2007.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12