小型無人機在簡化傳感器配置下的自主回收控制系統設計
2012-12-05 05:10:10王航宇
航天控制 2012年4期
王航宇
西安航空職業技術學院電子工程系,西安710089
小型無人機受體積和價格成本的約束,所搭載的傳感器都是一些質量輕、體積小的微型器件。這些器件的精度一般都比較低,而且運行不穩定,容易隨溫度等因素的變化而發生變化。另一方面,如何安全精確的實現小型無人機的回收一直是小型無人機飛行控制研究中的一個重要內容。就回收方式而言,傘降回收雖然容易進行控制,但很難精確的控制著陸點,相比較而言,采用輪式起降的小型無人機的回收控制器結構雖然比較復雜,但是控制回收著陸的精確性卻比較高。
基于單GPS 的小型無人機飛行控制方法,在國內外都有一定程度的研究,也有一定的工程應用基礎。本文在這些研究基礎之上,提出了一種僅利用單GPS 外加高度傳感器組成的簡易傳感器組合,并基于該組合設計了一個小型無人機的自主回收控制系統。
1 回收段飛行軌跡分析
回收段是無人機飛行過程中的最后一個階段,也是較難控制的一個階段,這一階段的控制任務主要體現在縱向軌跡控制方面。不失一般性,本文將無人機的回收過程分為進場、下滑、拉平和滑跑4個階段[1]。下面分別對每個階段進行分析、說明。
1)進場段
初始進場段,無人機從巡航高度開始,下降到指定高度并在該高度保持定高飛行。該段的控制主要表現為縱向的高度保持和橫側向的側向偏離控制。
2)下滑段
當無人機滿足下滑條件后,即從進場段轉入到下滑段。在這一階段,無人機以某給定的航跡角下滑。該段的控制主要表現為縱向的軌跡追蹤和橫側向的側向偏離控制。
3)拉平段
由于下滑過程中無人機的垂直速度過大,因此需要通過設計拉平段來減小無人機的著地速度,一般將該速度限定在-0.5m/s 到-0.6m/s 之間。常見的控制方式有軌跡控制和垂直速度控制兩種。本文通過對垂直速度的控制進而使飛機沿設定的拉平航跡飛行,最終實現拉平段的控制。
4)滑跑段
當無人機按照預定的飛行軌跡將高度和垂直速度減小到接地允許的范圍后,無人機就進入接地滑跑段。在進入滑跑段后,發動機關閉。利用輪子剎車系統減小滑跑速度,最終將無人機的速度降為0。這一階段的控制主要表現為縱向的減速控制和橫側向的糾偏控制。
圖1 為無人機回收過程中的縱向剖面圖。
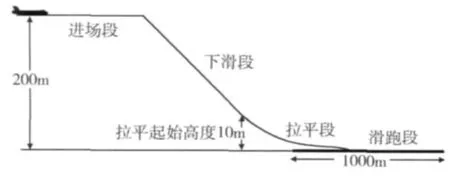
圖1 無人機自主著陸全過程
2 基于單GPS 的飛行控制
GPS 不但提供了載體的速度和位置信息,而且還可以用這些信息來估計載體運動過程中的姿態信息。自從這一想法提出至今,大部分的研究工作都是圍繞著如何利用多個GPS 估計載體姿態的問題展開的。
1998年,Kornfeld 給出了一個利用單GPS 測量飛行器姿態的有效算法[2]。圖2 為該算法的簡單計算過程。
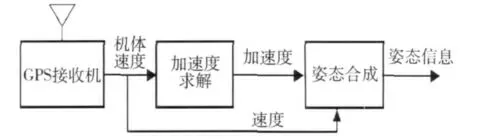
圖2 單GPS 姿態求解示意圖
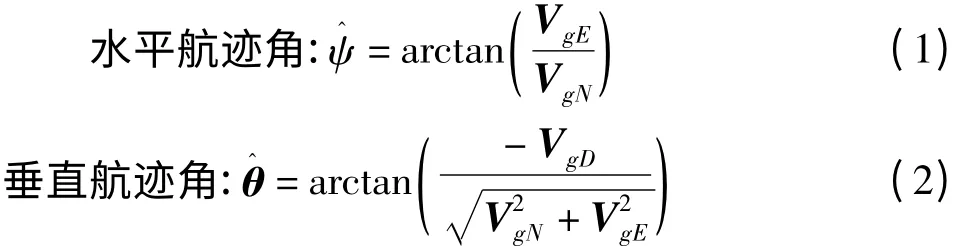
Kornfeld 算法的核心是利用GPS 輸出的速度信息合成出飛行器的姿態信息,合成的姿態包括根據飛行器速度向量軸確定的水平航跡角、垂直航跡角和滾轉角。由于速度軸不可能總是與機體軸保持一致,因此,利用該法估計出的姿態也稱為“偽姿態”。按照Kornfeld 的方法,式(1)~(5)給出了相應的偽姿態計算公式。
滾轉角的求解需要按照如下方式進行。
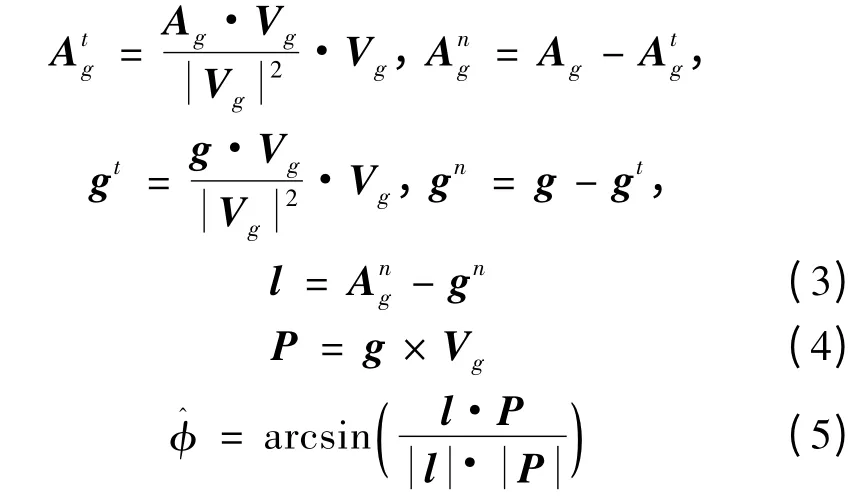
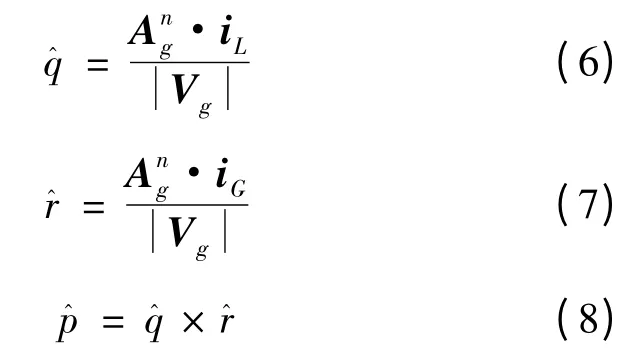
在上面各式中,Vg=[VgNVgEVgD]T,Ag=[AgNAgEAgD]T,g=[0 0 gD]T。而和分別表示Ag沿著Vg的切線方向和法線方向的分量;同理,gt和gn則分別表示g 沿著Vg的切線方向和法線方向的分量。由于沒有加速度計,這里的Ag是通過對Vg進行微分計算得到的。式(6)~(8)給出了偽姿態對應的角速率計算公式。
在隨后的研究工作中,Sungmin Park 和Changdon Kee 對Kornfeld 的方法進行了改進,他們將GPS的星歷信息和飛行器動力學方程引入到了偽姿態的求解過程中,取得了比較好的結果[3]。Sungmin Park 和Changdon Kee 提出了使用“動力學濾波器”作為外部濾波器,在姿態合成之后對合成的姿態進行濾波處理,進而得到較為理想的姿態信息。這個所謂的“動力學濾波器”其實就是系統的動力學方程。它的形式類似于卡爾曼濾波器,時域的表示形式為:
量測模型:z = h (x,u,t)+ v,其中,z =[uzpzqzrzψzθzφz]T,h(x,u,t)是量測方程,v 是量測噪聲模型。
圖3 給出了經過Sungmin Park 和Changdon Kee改進后的姿態確定系統的結構圖。
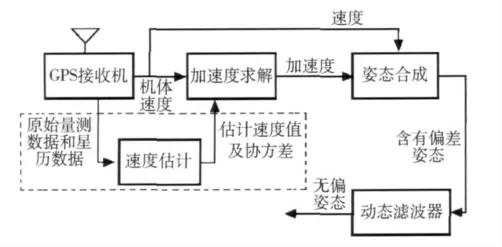
圖3 優化姿態確定系統結構圖
受到研究條件的限制,本文沒有將GPS 的星歷信息引入到系統當中,因此也就沒有圖3 虛線框中的內容。姿態角的求解是按式(1)~(8)的計算過程進行解算。在姿態合成完之后,利用“動力學濾波器”對所求解的姿態角等信息進行濾波處理,從而得到與真實姿態角接近的偽姿態角。
3 自主著陸控制器結構設計
從整個回收過程來看,針對小型無人機的控制主要為縱向的高度保持,軌跡追蹤,垂直速度控制;而橫側向則主要表現為側向偏離控制。下面將對第一節論述的回收過程的4個階段分別進行控制器結構的設計。
1)進場階段:在進場階段,對飛行器的控制主要表現為縱向的高度保持和橫側向的側向偏離控制。所設計的縱向高度保持回路控制器結構如圖4所示。
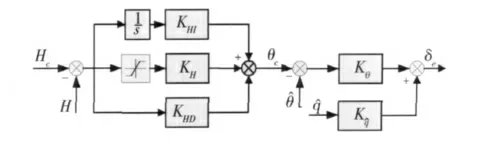
圖4 高度保持回路控制器結構
圖4 中的內回路為俯仰角保持回路,其中反饋回來的俯仰角和俯仰角速率均采用偽姿態計算式(2)和式(6)。外回路為高度保持回路,高度反饋量由高度表實時測量得到,高度給定量是預先設定的。
為保證在進場過程中,飛行器能夠及時與跑道中心線對齊,因此需通過側向偏離控制使得飛行器盡早保持在跑道中心線所在的垂直面內。圖5 給出了橫側向的側向偏離控制器結構。側偏距和實時航向角按照給定的導航計算公式求得,而反饋量則是按照式(1)、式(5)、式(7)和式(8)計算求得。內回路為滾轉保持回路,外回路為側向偏離控制回路。
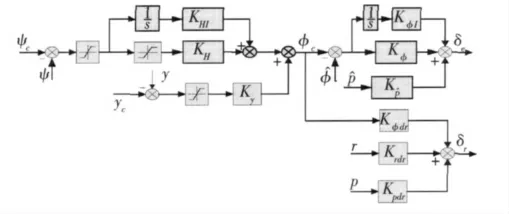
圖5 側向偏離控制器結構圖
2)下滑階段:下滑段縱向為軌跡追蹤控制,橫側向為側向偏離控制。對于縱向軌跡追蹤,除了要進行高度的控制之外,還要進行垂直速度的控制。所設計的縱向軌跡追蹤控制器的結構如圖6 所示。其中,高度給定值是通過對預先設定的航線值進行采樣得到,高度反饋值由高度傳感器輸出。垂直速度由GPS 提供。橫側向依然保持側向偏離控制,其控制器結構和圖5 所示的控制器結構相同。
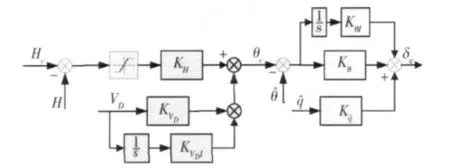
圖6 縱向軌跡追蹤控制器結構圖
3)拉平階段:當飛行器距離機場高度10m 時,轉入到拉平軌跡控制。拉平軌跡根據飛行器的自身性能預先設定。拉平階段的縱向控制主要表現為垂直速度控制,控制器結構如圖7 所示。橫側向依舊是側向偏離控制,控制器結構如圖5 所示。
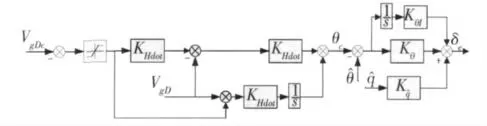
圖7 縱向拉平軌跡控制器結構
4)滑跑階段:當飛行器結束拉平段飛行后,控制邏輯自動將控制任務轉入滑跑控制階段。在這一階段中,縱向控制系統的主要任務就是減小飛行器的滑行速度,直到速度為0。控制器結構如圖8 所示。
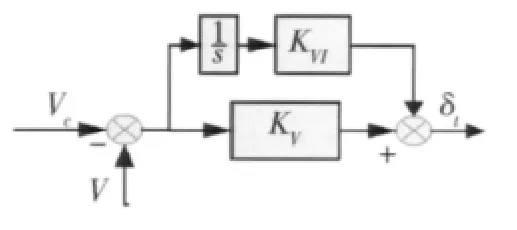
圖8 縱向滑跑控制器結構
橫側向的控制任務依舊是側向偏離控制。由于本文所研究的小型無人機體積小,速度低,因此,在滑跑過程中沒有對前輪進行轉彎控制。
4 控制律參數選擇
在選擇控制律參數時采用了序列二次規劃(SQP)算法,下面對這一過程進行簡單論述。
4.1 序列二次規劃(SQP)算法描述
有關SQP 方法的描述如下:對于式(9)所示的二次規劃問題,要求該式的解,其實就是對Langranre 函數的二次近似求解問題。

式(9)是假設約束條件為不等式約束后簡化得到的,因此要得到二次求解問題則必須通過線性化非線性約束條件:
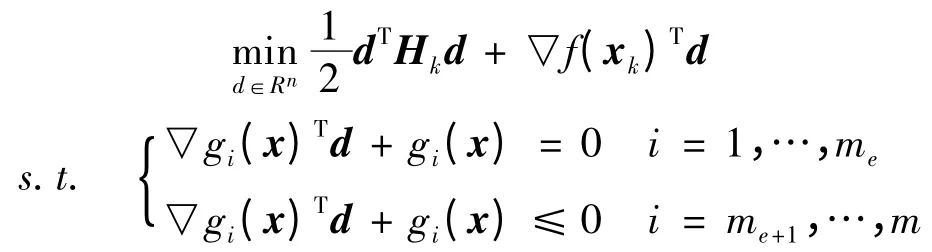
其中,▽表示梯度,矩陣Hk是Langrange 函數Hessian 矩陣的正定近似,Hk可以用任何逆牛頓方法得到更新。而上式則可以利用QP 算法來求解。
MATLAB 中的優化工具箱提供了有關SQP 算法的相關內容,下面以高度保持回路為例論述利用SQP 算法確定控制律參數的過程。
4.2 SQP 算法實現
高度保持回路的控制器結構如圖4 所示。將俯仰角保持回路看作內回路。高度保持回路控制器采用PI 調節器,控制律參數分別為KH和KHi。
首先,初始化控制器參數,只要保證系統穩定就行。初始化高度保持回路的控制器參數為:KH=2,KHi=0。其次,結合飛行器自身性能確定約束條件。對本文所研究的小型無人機的高度保持回路,要求在高度差50m 時,能夠在15s 內達到穩態并且控制在正負1m 的精度范圍內。同時要求俯仰角速率不能大于20(°)/s。根據上面的要求在信號約束模塊中添加約束條件。接著,在信號約束模塊中選擇調節器參數。最后,調用SQP 算法進行仿真。如果無解,則需要另行選擇初始化參數,也可以適當將約束條件放寬,再重復上面的過程,直到選出理想的控制律參數。
5 數字仿真驗證
在設計完控制器結構之后,利用在Simulink 環境下建立的全系統非線性仿真模型,對所設計的控制器結構和控制律參數進行數字仿真驗證。
假設初始條件為:飛行高度100m,距離下滑航線中心線500m,飛行速度為該無人機的巡航速度20m/s,則該小型無人機回收過程的飛行航跡如圖9所示。圖10 給出了該回收過程中3個姿態角的變化曲線。
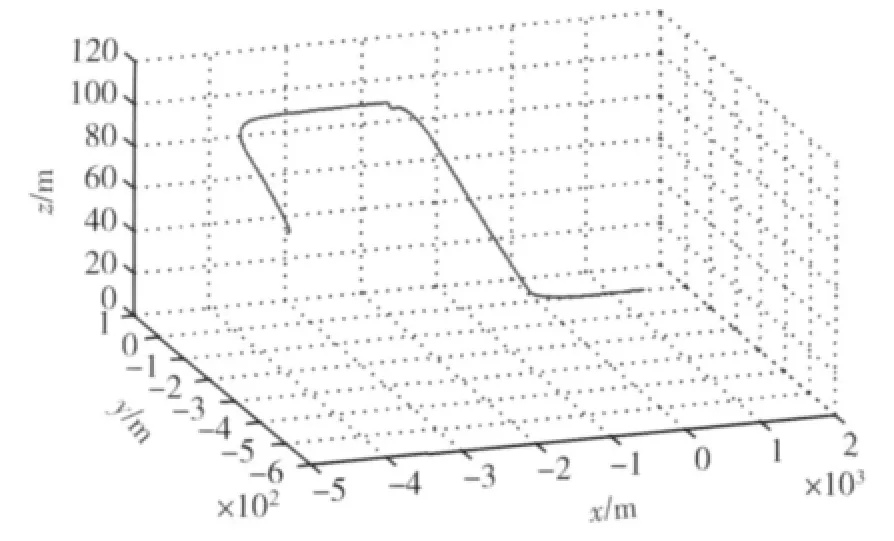
圖9 小型無人機回收過程高度變化曲線
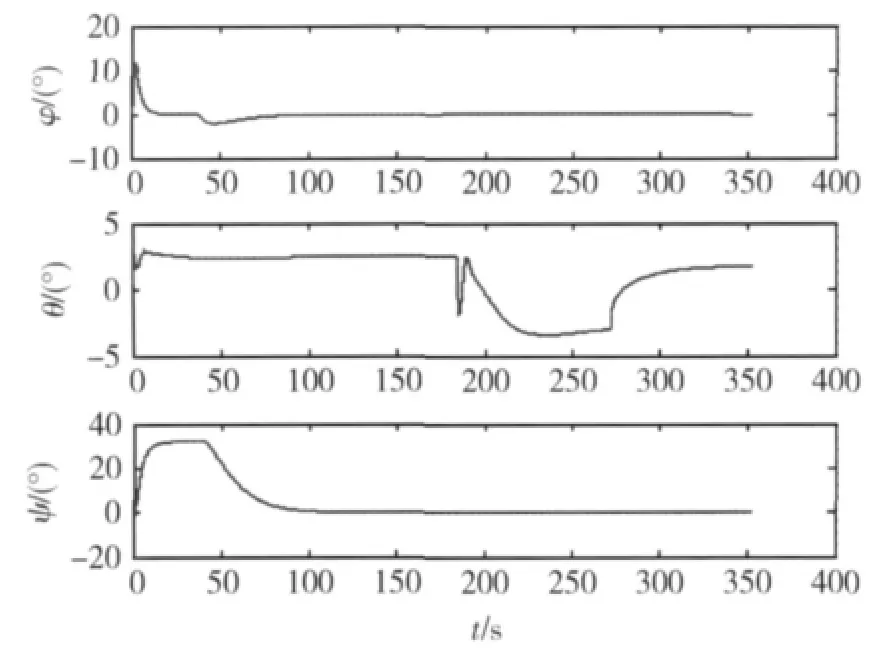
圖10 回收過程中3個姿態角變化曲線
從上面的仿真結果可以看出,本文所設計的基于GPS 和高度傳感器這一簡化傳感器組合能夠實現小型無人機的自主回收控制任務。從應用的角度來看,本文所研究的自主回收系統既可以單獨完成小型無人機的回收任務又可以做為常規回收系統的備份,保障小型無人機回收任務的順利完成。
[1]張明廉.飛行控制系統[M]. 北京:航空工業出版社,2003.
[2]Kornfeld R Hansman. Single-antenna GPS Based Aircraft Attitude Determination[J]. Journal of the Insistute of Navigation,2006,45(6):51-60.
[3]Sungmin Park,Changdon Kee. Enhanced Method for Single-antenna GPS-based Attitude Determination[J]. Aircraft Engineering and Aero-space Technology:An International Journal,2006,37(8):236-243.
[4]金長江,范立欽. 飛行動力學(飛機飛行性能計算)[M].北京:國防工業出版社,2000.
[5]Max Baarspul.A Review of Flight Simulation Techniques[J]. Progress in the Aerospace Sciences,1990,27(1):37-43.
[6]段松云. 無人機起飛/著陸階段建模和飛行動力學仿真系統設計[D].清華大學,2004.
[7]張江平.飛控系統中傳感器的建模與仿真[D].北京航空航天大學,2000.
[8]樓順天,于衛.基于MATLAB 的系統分析與設計[M].西安電子科技大學出社,2006.
[9]王偉. 無人機自動著陸控制系統的設計與實現研究[D].西北工業大學,2006.
