雙搖桿機構糾偏輥擺動量分析計算
2012-12-03 07:56:12解恒坤
重型機械 2012年6期
解恒坤,萬 飛,解 天
(1.寶鋼工程技術集團有限公司,上海 201999;2.軟通動力信息系統服務有限公司,上海 200120)
0 前言
在帶鋼精整及后處理的生產過程中,由于原材料、設備制造、安裝或工藝等原因,可能會造成帶鋼在機組中跑偏。帶鋼跑偏,輕則影響鋼卷的質量,重則引起斷帶,造成生產線停機,影響生產的正常進行,并造成機械設備損壞,影響設備使用壽命。為防止帶鋼跑偏,根據機組的長度和產品的需要,在機組中布置一定數量的糾偏輥,保證帶鋼沿生產中心線方向正常運行生產出合格的產品。
本文分析了單輥雙搖桿糾偏機構的結構,并對糾編量及液壓缸行程進行了計算。
1 雙搖桿機構糾偏輥結構
雙搖桿糾偏輥的工作原理是糾偏輥及擺動機架在固定機架上擺動,使糾偏輥轉動一定角度,達到糾偏的目的。其結構是在擺動機架兩側各有一連桿,連桿一端連接擺動機架,另一端連接固定機架,使之成為雙搖桿機構,圖1為單輥式雙搖桿糾偏輥的簡化結構。固定機架安裝在基礎或平臺上,輥子安裝在擺動機架上,輥子與擺動機架成為一體,通過搖桿AB、DC將固定機架與擺動機架聯接起來,搖桿AB可繞A點轉動,A點在固定機架上,B點在擺動機架上,搖桿CD可繞D點轉動,D點在固定機架上,B點在擺動機架上,構成為雙搖桿機構。其糾偏原理是:控制系統發出指令,糾偏液壓缸推動擺動機架,連桿AB轉動一定的角度,輥子隨擺動機架擺動,輥子軸線與機組中心線產生一定夾角,帶鋼在輥面上受力發生變化,使帶鋼沿輥子軸線向糾偏方向移動,達到糾偏目的。
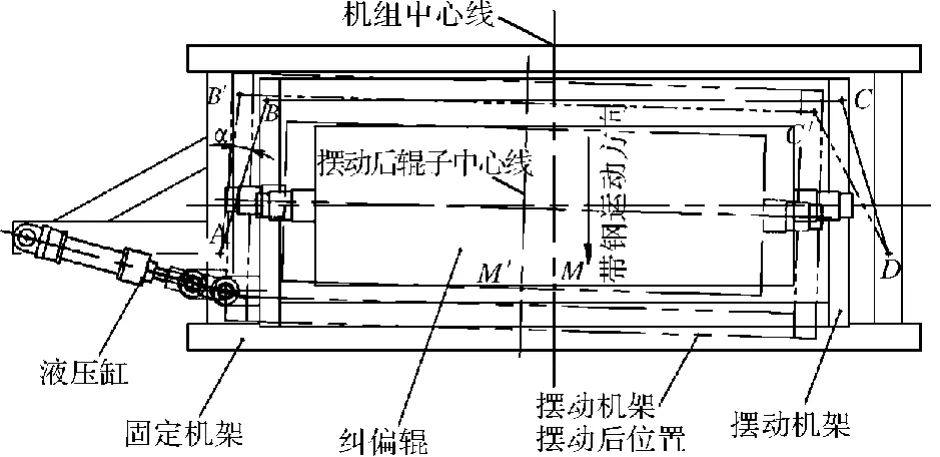
圖1 雙搖桿糾偏形式Fig.1 Structure of steering double-rocker roller
2 單輥雙搖桿機構糾偏輥分析計算
圖2為圖1單輥雙搖桿糾偏機構簡圖,A、B、C、D為四連桿上的四個鉸點,A、D為與固定機架相連的鉸接點,B、C為擺動機架上的鉸接點,F為連桿BC的中點,M點為輥子外圓與機組中心線的交點,Q點為液壓缸對擺動機架的作用點,G點為液壓缸固定點;當液壓缸推動擺動機架時,輥子上各點及擺動機架上的各點隨擺動機架作平面運動,與固定點A、D的相對位置及幾何角度發生變化,擺動機架及輥子上各點與連桿BC的相對位置不變 (見圖2b)。
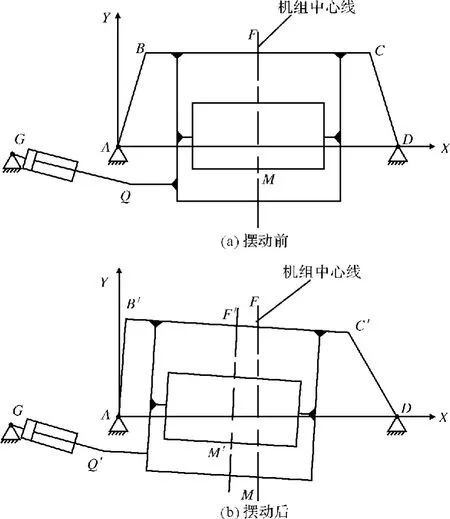
圖2 雙搖桿糾偏機構簡圖Fig.2 Diagram of steering double-rocker roller
2.1 雙搖桿機構糾偏輥糾偏量分析計算
在圖2和圖3中,設固定鉸點A為坐標系的原點,AD為X軸,垂直方向為Y軸建立平面直角坐標系。在圖3中,粗實線為擺動前初始位置,雙點線為擺動后位置,虛線為輔助線。設AB長為 l1,BC長為l2,CD長為l3=l1,DA長為l4。
擺動前擺動機架中心與機組中心重合,R點為Q點與連桿BC垂線的垂足,W點為Q點與擺動機架中心線FM的垂足;搖桿AB與X軸的夾角為α0,AF與X軸的夾角為ψF。
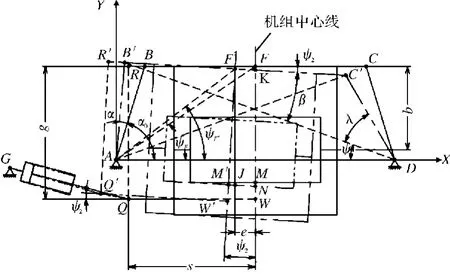
圖3 雙搖桿糾偏機構幾何分析計算圖Fig.3 Diagram of geometric analysis and calculation of steering double-rocker roller
當搖桿AB繞點A轉動角α時,B點運動到B',C點運動到C',F點運動到F'點,Q點運動到Q'點,M運動到M',W運動到W',R運動到R',輥子外圓與機組中心線的交點為N,過F'點作X軸垂線,與輥子外圓相交于J點;搖桿AB'與X軸的夾角 α0+α ,AF'與X軸的夾角 ψF',BC與 B'C'的夾角 ψ2,B'D與 B'C'的夾角 β ,DC'與DB'的夾角λ,B'D與X軸的夾角ψ。
線段NM'的長度則是糾偏輥的糾偏量δ,從圖3中可知,線段NM'長度為線段NJ與線段JM'的長度之和。

四邊形JNKF'為平行四邊形,則

如果將F點在X軸上的坐標變量以e表示,則
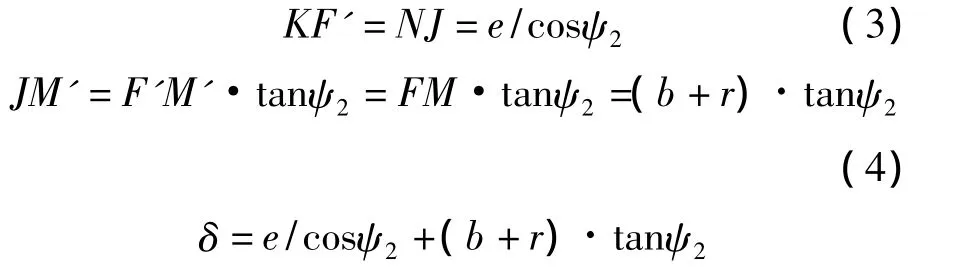
式中,e為連桿BC中點F擺動前、后水平坐標的變化量;b為連桿BC到輥子旋轉中心的距離;r為輥子半徑;ψ2為連桿BC初始位置與擺動后位置B'C'間的夾角。
初始位置即糾偏量為0時,

F點的坐標為
醫院設備管理主要是對醫院設備的整個生命周期進行管理〔8-9〕,醫院設備管理系統的整體架構圖和整體信息流的流向圖見圖1。

其中

在△AB'D中,線段B'D的長度為k,則
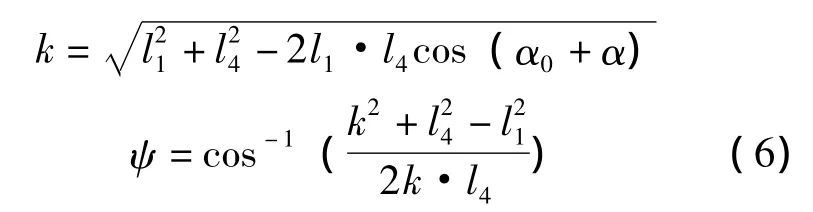
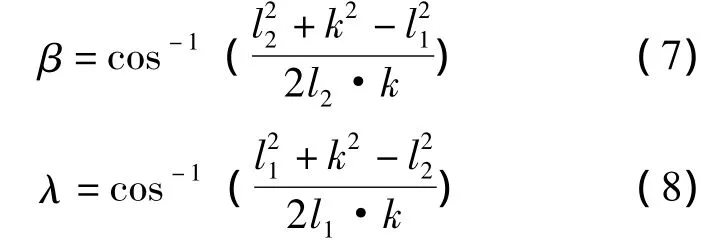
在△B'C'D中
在△AC'D中,線段AC'的長度為j,則

在△AB'C'中

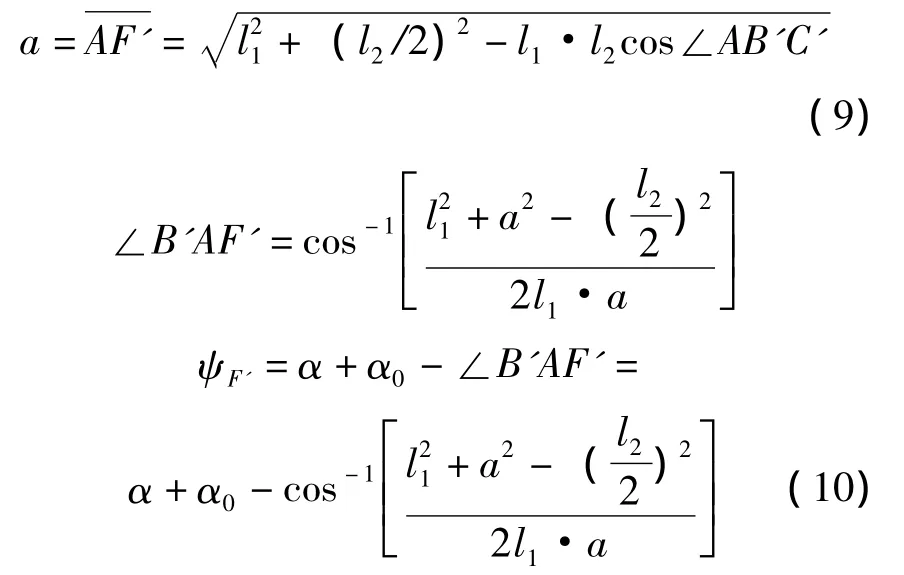
在△AB'F'中,線段AF'的長度為a,則
由于BC與AD平行,所以

當AB繞A點轉動α角后,可計算出F'點坐標值為 (a·cosψF',a·sinψF'),即

由上述各公式可計算出搖桿轉動α角后F'點的坐標值及需要的e值,從而計算出糾偏量δ

2.2 雙搖桿機構糾偏輥液壓缸行程分析計算
圖3中Q點為液壓缸在擺動機架上的鉸接點位置,當給定了帶鋼需要的糾偏量δ,可計算出所需要的液壓缸的行程t及在最大糾偏量時的液壓缸行程。在液壓缸的作用下,擺動機架隨連桿BC繞固定鉸點A、D轉動,當擺桿AB繞A點轉動α角后,矩形FWQR隨擺動機架擺動到F'W'Q'R',QQ'為液壓缸行程的一半,如果液壓缸的全行程用t表示,則線段QQ'的長度為t/2。要想求線段QQ'的長度,首先求出Q點及Q'點的坐標即可。
從圖3及以上推算可知,Q點的坐標為(l3/2-s,l1sinα0-g);;即 XQ=(l3/2-s),YQ=l1sinα0-g。
Q'點的坐標可通過點F'及W'的坐標求出,根據平面幾何及三角函數理論,有
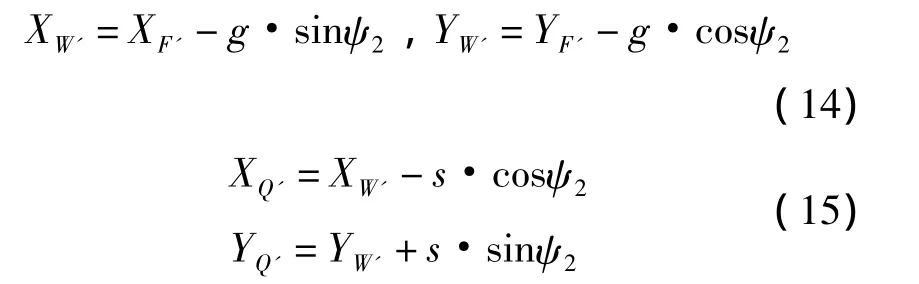
則液壓缸的行程為

式中,a為連桿BC中點F到A點的距離;s為液壓缸對擺動機架的作用點到機組中心線的距離;g為液壓缸對擺動機架的作用點到連桿BC的距離;b為連桿BC到輥子旋轉中心的距離;l1為搖桿AB的長度;l4為連桿AD的長度;α0為搖桿AB與CD的初始夾角;ψ2為連桿BC初始位置與擺動后位置B'C'間的夾角。
3 計算實例
某平整線上的一單輥雙搖桿糾偏結構,結構與圖1相同,已知參數為:l1=AB=CD=600,l2=BC=2 160,l4=DA=2 510.8,b=395,g=715,s=1 235,r=300(輥子直徑600 mm);要求糾偏量δ=150±5 mm。當搖桿AB轉動不同的角度α時,糾偏輥的糾偏量δ及液壓缸行程t計算值如表1所示。

表1 不同擺動角度的糾偏量及液壓缸行程計算數值表Tab.1 Calculation values of steering quantity and Hydraulic cylinder stroke when steering roller swings different angles
通過以上計算可知,當擺動角為12.1°時,糾偏量δ為要求值,此時液壓缸行程為306 mm。
4 結語
通過對單輥雙搖桿機構糾偏的分析和計算,可得出以下結論:
(1)單輥雙搖桿機構糾偏機構的糾偏效率較高,當液壓缸行程達到約300 mm時,就能達到糾偏輥的150 mm糾偏要求。
(2)雙搖桿機構糾偏機構與擺動點糾偏機構相比,其輥子隨擺動機架轉動的旋轉半徑比擺動點糾偏大的多。在糾偏機構中,糾偏輥隨擺動機架轉動的旋轉半徑越大,輥子偏移量越大,糾偏帶鋼的能力越大,糾偏效果越好。所以雙搖桿機構糾偏機構比擺動點糾偏機構糾偏能力強。
(3)根據本文得到的計算公式和計算方法,分析不同的搖桿長度、搖桿的設置位置和液壓缸作用力的位置,將會優化得到具有不同糾偏能力的單輥雙搖桿機構。
[1]郭為忠,于紅英.機械原理[M],北京:清華大學出版社,2010.
[2]楊基厚,曲繼方.機械原理[M],齊齊哈爾:東北重型機械學院,1984.
[3]周國盈.帶鋼精整設備 [M],北京:機械工業出版社,1982.
[4]許秀飛.鋼帶熱鍍鋅技術問答 [M],北京:化學工業出版社,2007.
