一種精簡化的球桿系統(tǒng)控制器建模方法
2012-12-01 10:08:18鐘秉翔高國芳
自動化儀表 2012年3期
關(guān)鍵詞:系統(tǒng)
鐘秉翔 高國芳
(重慶科技學(xué)院電氣與信息工程學(xué)院,重慶 401331)
0 引言
在實際生活或工程實踐中,一個熟練的操作人員憑借豐富的生活經(jīng)驗或?qū)嵺`經(jīng)驗,可以非常嫻熟、巧妙地控制一個復(fù)雜過程,并得到滿意的控制效果。能否采用自動控制的機器來代替人的行為,以及如何通過功能模擬實現(xiàn)這些有效的控制行為等關(guān)于人的控制行為功能模擬的智能控制器設(shè)計問題,均屬于智能系統(tǒng)辨識或建模問題。眾所周知,實現(xiàn)專家控制系統(tǒng)的前提是必須要有有效的專家經(jīng)驗知識;而模糊控制的設(shè)計必須依據(jù)人類直接控制被控對象的成功經(jīng)驗,沒有這類經(jīng)驗,模糊規(guī)則將無法設(shè)計。
理論研究表明,基于神經(jīng)網(wǎng)絡(luò)、自適應(yīng)模糊系統(tǒng)的控制系統(tǒng)具有一定的學(xué)習(xí)能力,能夠更好地適應(yīng)環(huán)境和系統(tǒng)特性的變化,適合不確定復(fù)雜系統(tǒng)的建模與控制。然而,隨著問題復(fù)雜性的增加,計算機控制系統(tǒng)在執(zhí)行數(shù)值運算時需要的時間呈指數(shù)增長,計算量呈指數(shù)增長,易出現(xiàn)維度災(zāi)難[1-3]。分析國內(nèi)外關(guān)于模糊系統(tǒng)、神經(jīng)控制器和支持向量機模型精簡化研究的現(xiàn)狀發(fā)現(xiàn),這些系統(tǒng)都局限于模型內(nèi)部結(jié)構(gòu)的優(yōu)化[4-6]。
本文針對控制器變量眾多、易出現(xiàn)維度災(zāi)難、系統(tǒng)復(fù)雜性增加等問題,以球桿系統(tǒng)作為研究對象,設(shè)計了精簡化的球桿系統(tǒng)控制器模型。通過尋找輸入空間的主要特征變量,剔除次要因素,精簡輸入空間維數(shù),減少控制系統(tǒng)數(shù)學(xué)模型復(fù)雜性;同時采用核函數(shù)方法和虛假最近鄰點法,實施智能控制器模型的非線性回歸建模,實現(xiàn)球桿系統(tǒng)的自動控制。
1 理論基礎(chǔ)
本文從輸入空間維數(shù)的精簡和優(yōu)化角度考慮,運用虛假最近鄰點法(faulse nearest neighbor point algorithm,F(xiàn)NN)確定輸入向量嵌入維數(shù),再通過核主元分析法(kernel principal component analysis,KPCA)提取特征值,實現(xiàn)了對非線性輔助變量空間的特征提取。
1.1 虛假鄰點法
虛假鄰點法的基本思想是當維數(shù)從m變成(m+1)時,考察軌線x的鄰點中的真實鄰點和虛假鄰點[7]。當沒有虛假的鄰點時,可以認為吸引子的幾何結(jié)構(gòu)被完全展開。設(shè)xβ(n)為xn的最近鄰點,它們之間的距離為‖xβ(n)-xn‖(m),當維數(shù)增加到 m+1時,它們之間的距離為‖xβ(n)- xn‖(m+1)。若‖xβ(n)- xn‖(m+1)比‖xβ(n)-xn‖(m)大很多,可以認為這樣的鄰點是虛假的。因此,若式(1)成立,則稱xβ(n)為xn的虛假鄰點,其中,Rt為閾值。

試驗證明,Rt可在[10,50]之間選取。對于無限長的精確數(shù)據(jù),采用上述標準可獲得較好的結(jié)果。對于有限長具有噪聲的數(shù)據(jù),則補充以下標準,若:
則稱 xβ(n)為xn的虛假鄰點,At為閾值。文獻[8]建議取At=2。
對實測時間序列,m從2開始,計算虛假最近鄰點的比例,直到虛假最近鄰點的比例小于5%。當虛假最近鄰點不再隨著m的增加而減少時,可認為吸引子的幾何結(jié)構(gòu)完全打開,此時的m即為嵌入維數(shù)。
1.2 核函數(shù)主元分析的基本原理
核主成分分析(KPCA)法利用核映射的原理,將原始空間的數(shù)據(jù)映射到高維特征空間,在特征空間中再對數(shù)據(jù)進行線性主元分析(principal component analysis,PCA)分析(對應(yīng)于原始空間的非線性運算)[8-11]。因此,它實現(xiàn)了樣本空間的非線性特征提取,具體的算法實現(xiàn)過程如下。
設(shè)X為原始空間Rn×l中的樣本數(shù)據(jù),n為變量維數(shù),l為樣本數(shù)。對其進行非線性變換Φ(X)后,將其映射到高維特征空間H中。Φ(X)的協(xié)方差矩陣C的表達式為:

特征向量v為原始樣本空間x在特征空間Φ(X)上的主元方向,其滿足:

將每個樣本 xj(j=1,2,…,l)變換為 Φ(xj)后,與式(4)進行內(nèi)積運算,可得:

由于vi是Φ(xi)的線性組合,于是存在αi(i=1,2,…,l)滿足:

式中:j=1,2,…,l;αi(j)為向量 αi的第 j個元素。
將式(3)、式(6)代入式(5),可得:
式中:i=1,2,…,l;特征值 λi≥0。
在再生核希爾伯特空間(reproducing kernel Hilbert space,RKHS)中,滿足Mercer定理的核函數(shù)對應(yīng)非線性函數(shù)的內(nèi)積運算,即:

這里,核矩陣要經(jīng)過中心化處理。利用式(8),可將式(7)變?yōu)?

式中:α 為特征向量,且 α=[α1,…,αl]。
在特征空間中,特征向量 α=[α1,…,αl]經(jīng)過PCA特征提取后,將得到滿足主元貢獻率的前k個主元向量α=[α1,…,αk]以及相應(yīng)的主元特征向量v=[v1,…,vk]。在此基礎(chǔ)上,原始空間X的主元向量=(x1,x2,…,xk)可通過Φ(X)在主元方向v上的投影得到,即:
式中:p=1,2,…,k;αp(i)為特征向量 αp中的第 i個元素;vp為v的第p個特征向量;K( xi,x)為核函數(shù)。
通過以上步驟,不但實現(xiàn)了矩陣從X∈Rl×n到~X∈Rl×k的非線性特征提取,同時也實現(xiàn)了非線性輔助變量空間的特征提取。
2 球桿系統(tǒng)結(jié)構(gòu)
為模擬人工操縱小球在橫桿的某一指定位置,采用固高科技有限公司的球桿系統(tǒng)GBB1004,通過自動控制電機的轉(zhuǎn)動,使小球穩(wěn)定在橫桿上的某一平衡位置。球桿系統(tǒng)主要由機械部分和智能伺服驅(qū)動和控制計算機等部分組成。其中機械部分包括底座、小球、橫桿、減速皮帶輪、支撐部分、馬達等,球桿系統(tǒng)機械部分結(jié)構(gòu)如圖1所示。
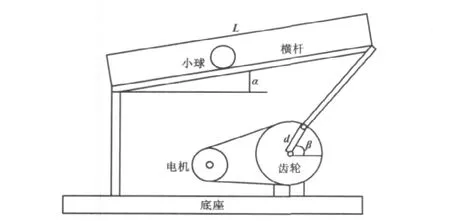
圖1 球桿系統(tǒng)機械部分結(jié)構(gòu)Fig.1 Partial structure of the mechanical part of the cue system
小球可以在橫桿上自由滾動,橫桿的一端通過轉(zhuǎn)軸固定,另一端由一連桿與齒輪相連,可以上下轉(zhuǎn)動。通過控制直流伺服電機的位置,帶動皮帶輪轉(zhuǎn)動,再通過傳動機構(gòu)就可以控制橫桿的傾斜角α。直流伺服電機帶有增量式編碼器,可以檢測電機的實際位置β。在橫桿上的凹槽內(nèi),有一線性的傳感器用于檢測小球的實際位置。α和β兩個實際位置的信號都被傳送給控制系統(tǒng),構(gòu)成一個閉環(huán)反饋系統(tǒng)。當皮帶輪轉(zhuǎn)動角度為β、橫桿的轉(zhuǎn)動角度為α、連桿和齒輪的連接點與齒輪中心的距離為d、橫桿的長度為L時,橫桿的傾斜角α和β之間存在以下數(shù)學(xué)關(guān)系:

電機的運動通過IPM100智能伺服驅(qū)動器進行控制,IPM100是一個智能的高精度、全數(shù)字的控制器,內(nèi)嵌100 W的驅(qū)動電路。基于反饋控制原理,在得到傳感器信號后對信號進行處理,然后給電機繞組施加適當?shù)腜WM電壓信號,這樣,相應(yīng)的轉(zhuǎn)矩作用于電機軸,使電機開始運動。
3 球桿系統(tǒng)控制方案
球桿系統(tǒng)是一個典型的非線性系統(tǒng),球桿系統(tǒng)中小球位置的控制不僅與橫桿的實際位置和小球的實際位置有關(guān),還與以前的橫桿和小球的位置有關(guān)。因此,小球位置可以表示為關(guān)于小球的時間序列和橫桿位置的時間序列非線性方程。小球系統(tǒng)的非線性方程可以表示為:

式中:x1(k),x1(k-1),…,x1(k-m1),x2(k),x2(k-1),…,x2(k- m2)為原始變量組;x1(k),x1(k-1),…,x1(k-m1)為小球位置的時間序列;x2(k),x2(k-1)…,x2(k-m2)為橫桿轉(zhuǎn)角的時間序列;m1、m2分別為時間序列的嵌入維數(shù)。
在處理非線性輸入變量選擇問題時,可合理地提取特征和減少維度。為此,建立的球桿系統(tǒng)控制器數(shù)學(xué)模型如圖2所示。
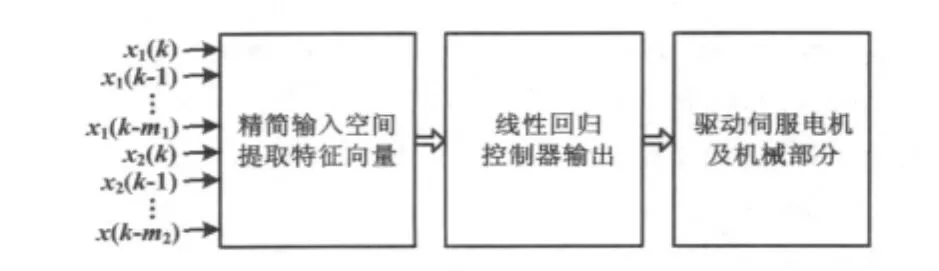
圖2 球桿系統(tǒng)控制器數(shù)學(xué)模型Fig.2 The mathematical model of the cue system controller
由于模型的階數(shù)和信息融合結(jié)構(gòu)均未知,如考慮所有的輸入時延信息,將大大降低其實時性能。因此,可采用本文的方法進行輸入相空間的特征提取和信息融合相空間結(jié)構(gòu)的確定。
由于球桿系統(tǒng)控制器的輸入相空間由小球位置信號和橫桿轉(zhuǎn)動角度及其時間延時組成,而球桿系統(tǒng)是一個模型階數(shù)、結(jié)構(gòu)均未知的復(fù)雜系統(tǒng)。因此,首先要選擇小球位置信號和橫桿轉(zhuǎn)動角度及其時間序列,通過虛假鄰點法計算輸入樣本的嵌入維數(shù),從而確定作為球桿控制器模型的初始輸入相空間。
建立球桿系統(tǒng)所需的原始樣本數(shù)據(jù)經(jīng)過采集卡采集至計算機,共采集500組數(shù)據(jù)。本文通過異常點剔除和歸一化處理后,把剩下的488個數(shù)據(jù)分成兩組,其中400個數(shù)據(jù)用來建模和交叉檢驗,另外88個作為測試數(shù)據(jù)集。
4 試驗結(jié)果
樣本數(shù)據(jù)經(jīng)標準化后,利用虛假鄰點法計算輸入樣本的嵌入維數(shù),所得虛假最近鄰點比例與嵌入維數(shù)關(guān)系如表1所示。
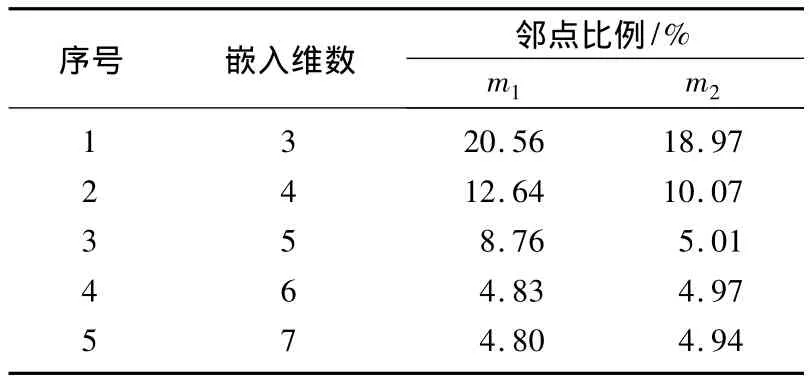
表1 鄰點比例與嵌入維數(shù)關(guān)系Tab.1 Relationship between proportion of neighbor point and embedded dimensionality
從表1可以看出,m1增加到6,m2增加到5,虛假最近鄰點不再減少,所以嵌入維數(shù)取m1為6,m2為5。
根據(jù)KPCA原理,可以計算出經(jīng)KPCA提取出的主成分、與主成分對應(yīng)的各方差貢獻率以及總方差貢獻率,主元分析結(jié)果如表2所示。
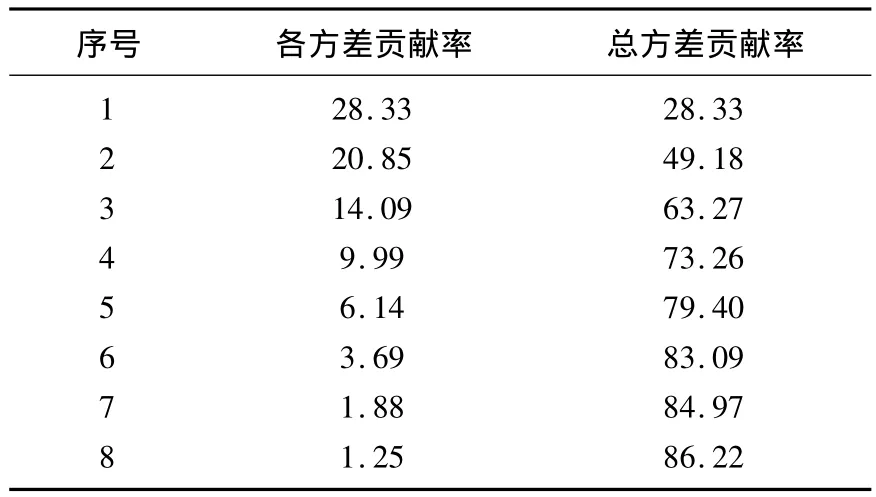
表2 主元分析結(jié)果Tab.2 Result of principal component analysis%
表2中,前8個主元的總累計方差貢獻率已經(jīng)達到了86.22%。文獻[10]提出當前k個主元所累積的方差貢獻率足夠大時(一般大于85%),就可以只取前k個主元作為新特征向量,即可以很好地反映過程信息而濾去冗余信息。因此,可認為前8個主成分已無相關(guān)性,且包括了原始數(shù)據(jù)的絕大部分信息,則選擇上述8個主元分量建立模型,利用最小二乘法即可建立數(shù)學(xué)模型。
不同模式下的控制效果比較曲線如圖3所示。
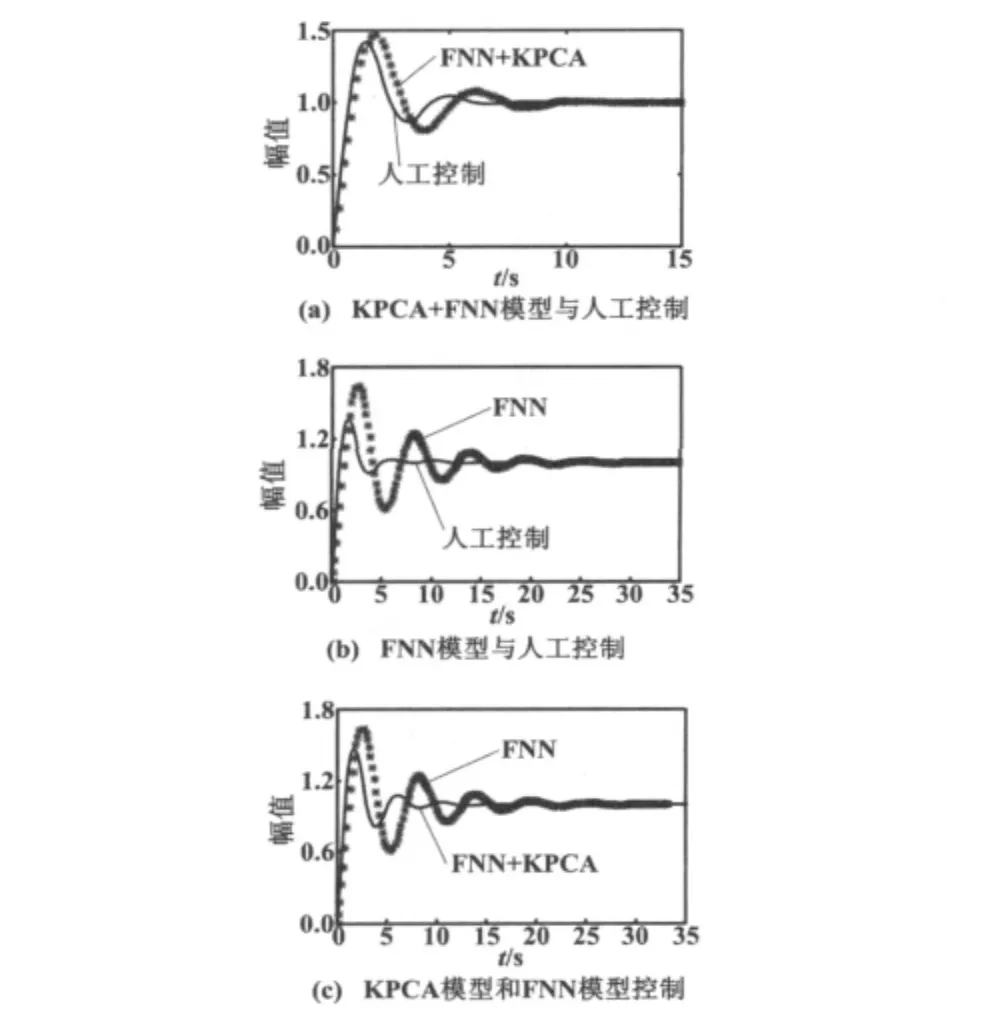
圖3 控制效果比較曲線Fig.3 Comparison curves of control effects
模型的訓(xùn)練精度和泛化能力可以用均方根誤差(root mean square percentage error,RMSPE)表示,其可定義為:
根據(jù)樣本數(shù)據(jù)和測試數(shù)據(jù),計算其訓(xùn)練誤差和測試誤差,計算結(jié)果如表3所示。

表3 兩種建模方法的精度比較Tab.3 Precision comparison of two modeling methods
從仿真試驗結(jié)果可知,2種模型都能達到預(yù)期效果;但從模型檢驗來看,KPCA+FNN模型具有較好的泛化能力。綜合考慮模型的復(fù)雜性、控制精度和泛化能力,KPCA+NN的建模方法更適合用于功能模擬智能控制器模型設(shè)計。
5 結(jié)束語
本文設(shè)計的球桿系統(tǒng)控制器利用虛假最近鄰點法確定球桿系統(tǒng)的輸入向量維數(shù)[12];采用核主元分析方法提取輸入特征向量,精簡輸入空間的維數(shù);利用最小二乘法進行線性回歸,建立球桿控制系統(tǒng)的數(shù)學(xué)模型。試驗結(jié)果表明,基于虛假最近鄰點法和核主元分析法的球桿系統(tǒng)控制器能較好地模擬人的控制行為且有較好的泛化性能。該建模方法有利于提高球桿控制系統(tǒng)的穩(wěn)定性和控制精度,減少輸入變量嵌入維數(shù),避免維度災(zāi)難,從而為解決復(fù)雜控制系統(tǒng)中易出現(xiàn)的的維度災(zāi)難和精簡化建模等問題提供了一定思路。
[1]Bengio S,Bengi Y.Taking on the curse of dimensionality in joint distributions using neural networks[J].IEEE Transactions on Neural Networks,2000,11(3):550 -557.
[2]Paul M.Class-specific classifier:avoiding the curse of dimensionality[J].IEEE A & E Systems Magazine,2004,19(1):37 -52.
[3]Guven M K,Passino K V.Avoiding exponential parameter growth in fuzzy systems[J].IEEE Transactions on Fuzzy Systems,2004,19(1):194 -199.
[4]Li T F,Su Y Y,Zhong B X.Remodeling for fuzzy PID controller based on neural networks[C]//2007 Advance in Soft Computing,Springer-Verlag,2007:714 -725.
[5]Li C S,Lee C Y.Self-organizing neuro-fuzzy system for control of unknown plants[J].IEEE Transactions on Fuzzy Systems,2003,11(1):135-150.
[6]陳永義,俞小鼎,高學(xué)浩,等.處理非線性分類和回歸問題的一種新方法(I)——支持向量機方法簡介[J].應(yīng)用氣象學(xué)報,2004,15(3):345 -354.
[7]王海燕,盧山.非線性時間序列分析和應(yīng)用[M].北京:科學(xué)出版社,2006.
[8]Kennel M B,Brown R,Abarbanel H D.Determining embedding dimension for phase space reconstruction using a geometrical construction[J].Phisical Review,1992,45(6):3403 -3411.
[9]Sun Z L,Huang D S,Cheung Y M.Extracting nonlinear features for multispectral images by FCMC and KPCA[J].Digital Signal Processing,2005,15(4):331 -344.
[10]Lee J M,Chang K Y,Sang W C.Nonlinear process monitoring using kernel function principalcomponentanalysis[J].Chemical Engineering Science,2004,59(1):223 -234.
[11]王華忠,俞金壽.核函數(shù)方法及其在過程控制中的應(yīng)用[J].石油化工自動化,2005(1):25-30.
[12]王秋紅.ITCC壓縮機控制系統(tǒng)在乙烯裝置中的應(yīng)用[J].石油化工自動化,2006,39(3):39 -41.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32