高速微注射成型中熔體充填模式及裹氣機理研究
2012-11-30 00:38:16張世勛葉曙兵申長雨
中國塑料 2012年1期
張世勛,曹 偉,葉曙兵,李 倩,申長雨
(1.鄭州大學橡塑模具國家工程研究中心,河南 鄭州450002;2.深圳市兆威機電有限公司,廣東 深圳518103)
高速微注射成型中熔體充填模式及裹氣機理研究
張世勛1,曹 偉1,葉曙兵2,李 倩1,申長雨1
(1.鄭州大學橡塑模具國家工程研究中心,河南 鄭州450002;2.深圳市兆威機電有限公司,廣東 深圳518103)
為了準確模擬聚合物熔體在型腔中的流動及前沿位置和形態,建立了熔體、氣體兩相流流動模型,構造了熔體流動的黏彈性本構關系,并采用水平集方法預測和跟蹤熔體流動前沿,模擬了熔體在低速、中速、高速條件下的流動狀態和充填模式,分析了高速微注射成型中氣孔產生的原因和可能出現的位置,開展了實際產品的高速微注射成型實驗,比較了模擬結果和實驗結果。研究表明,熔體充填模式與注射速度、材料特性、型腔尺寸密切相關,在噴射充填模式下可能產生裹氣。
微注射成型;兩相流;充填模式;黏彈性模型
0 前言
與常規注射成型相比,高速微注射成型數值模擬需要考慮尺寸效應及氣體聚積現象。Yao等[1]建立了微流動的微觀黏度模型,并在常規Hele-Shaw流動模型中加入了滑移邊界和表面張力等邊界條件,發現邊界滑移效應隨尺寸的減小而增大,而表面張力效應隨注射壓力的增大而顯著減小,Kim等[2]用三維數值模擬也發現了類似的規律。最近,Choi等[3]提出了模擬帶有微特征制品成型的多尺度方法,而且發現當微特征的尺寸小于10μm時需要加入滑移邊界條件。隨著注射速度的增加,型腔中聚積的氣體會對熔體的充填產生阻礙作用,并對多型腔流動平衡產生影響,曹偉等[4]和Griffiths等[5]分別用數值模擬和實驗方法研究了氣體的聚積及其對熔體充填及流動平衡的影響。
雖然學術界在滑移邊界、表面張力及微觀黏度等尺寸效應研究上取得了重要進展,但屹今為止尚未出現高速注射成型中有關流體充填模式的報道,也未發現熔體裹氣現象及機理等相關研究,而深圳兆威機電有限公司在實際生產中發現當以800mm/s的注射速度成型帶有微特征的斜齒輪時,熔體在較大型腔內產生了噴射,并在壁厚方向形成了氣孔。由此可見,在高速微注射成型中,熔體不完全按照傳統的近至遠順序充填模式充滿整個型腔,可能在較大空腔處產生噴射,并可能與后期到達的熔體形成裹氣。因此,探索高速注射成型熔體的充填模式及裹氣機理對微注射成型模擬及制品質量預測是十分必要的。
本研究借鑒金屬壓鑄成型中兩相流模擬裹氣原理[6-7]建立耦合的熔體流動、氣體流動模型,用數值模擬方法探索高速微注射成型熔體的充填模式,研究熔體裹氣產生的力學機理,分析影響熔體充填模式的主要影響因素。開展實際制品的微注射成型實驗,比較模擬結果與實驗結果,分析誤差產生的原因。
1 氣-熔兩相流數學模型
1.1 控制方程
在微注射成型過程中,熔體的充填和型腔氣體的排出是相互依存的兩相流,若排氣順暢,氣體的密度將不會有較大變化,熔體和氣體均可以看作不可壓縮流體,忽略流體的重力,等溫熔體流動的控制方程為:
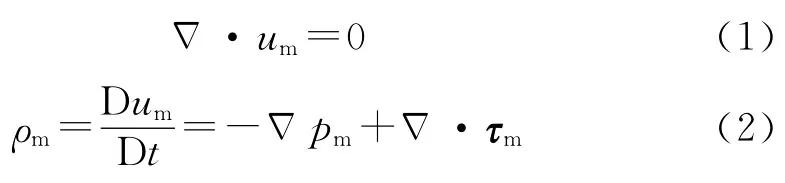
式中 um——熔體流動速度,m/s
ρm——熔體密度,kg/m3
t——充填時間,s
pm——熔體壓力,Pa
τm——外應力張量,Pa
氣體流動的控制方程為:

式中 ρg——氣體密度,kg/m3
ug——氣體流動速度,m/s
pg——氣體壓力,Pa
τg——氣體外應力張量,Pa
對于氣體,忽略彈性,只考慮黏性,則:

ηg——氣體黏度,Pa·s
與純黏性的氣體不同,熔體是黏彈性非牛頓流體,本研究采用單松馳時間譜的PTT模型建立熔體在流動過程中的本構方程[8]:

ξm——材料常數
上隨流導數定義為:

在氣-熔界面上,法向上的合力差應等于界面的表面張力(σ):

式中 κ——表面曲率
I——單位矩陣
在模壁上采用滑移邊界條件:

式中 β——滑移長度,m
圖3、4:作者根據參考文獻[11],以及ht t p://designer.home.163.com/case/main/2367/44668.html(即下山建筑平面)進行疊加繪制;
us——壁面滑移速度,m/s
τs——壁面剪切應力,Pa
1.2 界面演化方程
用水平集方法跟蹤氣-熔界面的移動和演化。定義d(X,Γ)為點X到界面Γ的最短距離,水平集函數φ(X)為點X到界面Γ的符號距離[7],即:
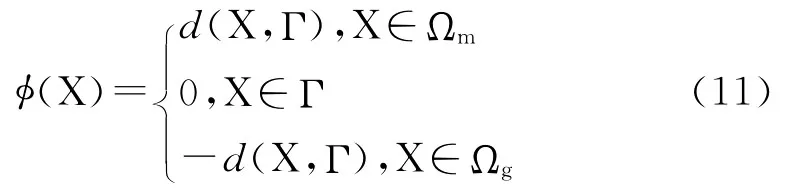
式中 Ωm——熔體區域
Ωg——氣體區域
因此,任意時刻氣-熔界面即為水平集函數φ(X)的零等值面,界面的法向、曲率可用水平集函數表示為:

界面的演化方程為:

在界面上,考慮表面張力的貢獻,兩相流的控制方程和本構方程可以統一表示為:Δ

式中 tr——張量的跡,tr(τ)=τxx+τyy+τzz
對應于熔體,變量ρ,p,u,τ分別取ρm,pm,um,τm,氣體則取ρg,pg,ug,τg;對于氣體區域,本構方程(17)中λ=0,PTT模型簡化為純黏性模型。
為了研究界面的演化與熔體的流速、黏彈性等之間的關系,對上述方程進行無量綱化運算,設:
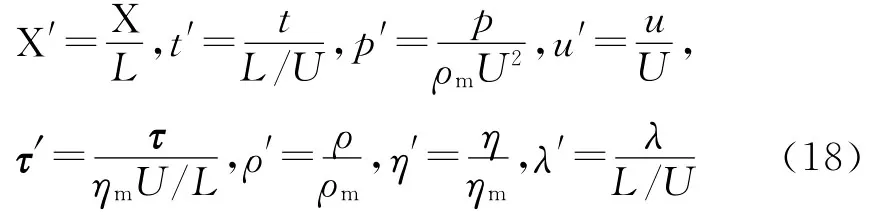
式中 L——型腔的特征長度,m
U——熔體的特征速度,m/s
將上述變量代入方程(15)~(17),去掉標記“′”后方程變為:

式中 Re——雷諾數
We——韋伯數
ρ(φ)——密度,kg/m3
η(φ)——黏度,Pa·s
λ(φ)——松馳時間,s
2 數值方法
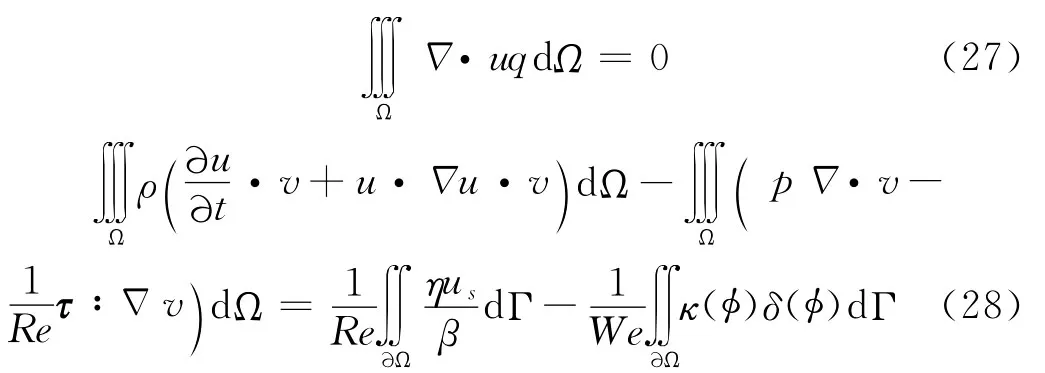
由于微注射成型制品結構復雜,大多沒有規則的幾何形狀,適宜于用有限元法求解成型問題。用檢驗函數q,v分別乘以方程(19)、(20),再積分得到變分方程:
為了保證數值方法的穩定性,采用DG(Discontinuous Galerkin)方法離散本構方程[9]。用檢驗函數S雙點積方程(7),然后在熔體充填區域積分得:
式中 τext——上游鄰接單元應力,Pa
為了保證數值算法的穩定性,插值多項式必需滿足 Ladyzenskaya-Babuska-Brezzi條件[9],為此本文采用二階單元離散速度場,一階單元離散壓力場、應力場,變分方程(27)~(29)離散后為代數方程組(30),是非線性代數方程組,采用Newton-Raphson迭代法求解:

解出速度場之后,用有限元法更新水平集函數,確定前鋒面位置。用檢驗函數r(X)乘界面演化方程(14),再用高斯公式分步積分得到關于水平集函數φ的變分方程:

用一階單元離散變分方程(31),求出前鋒面上的符號距離φ。從方程(31)解出的φ并不總是距離函數,即滿足|Δφ|=1,而且,當兩界面匯合后φ演化為跳躍函數,所以,需要對φ進行重新初始化。本文采用Sussman方法[10]重新初始化水平集函數,設變分方程(31)的解為φ0,構造初始化求解問題:

式中 tr——參考時間,s
sgn(φ0)——符號函數
ε——網格尺寸的高階小量,用以保證分母的非奇異
用有限差分法求解問題(32),得到的穩態解即為重新初始化后的水平集函數。
3 實驗部分
3.1 模擬材料
模擬材料選用聚甲醛(POM),其主要性能材料參數如表1所示,其中流變性能參數是用旋轉流變儀(ARES 2000,Rheometric Scientific,USA)在溫度為210℃,載荷為2kg條件下測得。

表1 POM的性能參數Tab.1 Properties parameters of POM
3.2 設備及工藝參數
實驗選定的塑料斜齒輪是深圳兆威機電有限公司設計和加工的齒輪箱配件,齒高和齒厚分別為1.08mm和0.73mm,長15mm,如圖1所示。將該齒輪應用在微注塑機(Sodic LD30EH20)上,鎖模力30kg,最大注射速度800mm/s,成型過程設置的工藝參數如表2所示。
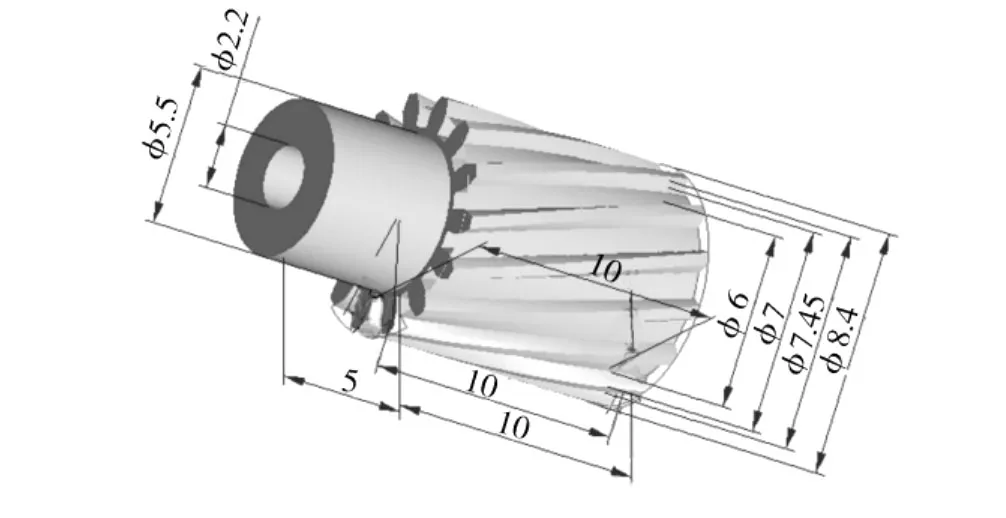
圖1 斜齒輪實體模型及尺寸Fig.1 Solid model and dimension of skew gear

表2 斜齒輪加工的工藝條件Tab.2 Process conditions for skew gears
4 結果與討論
在成型過程中發現在位于澆口一側壁厚方向上出現氣孔,而且重復度很高,任何干燥方法及保壓壓力都無法避免這一缺陷,說明氣孔的形成與材料是否潮濕及收縮無關,是熔體流動過程中裹入氣體產生的。同時,缺料注射發現熔體進入底部空腔后出現噴射,如圖2所示,說明熔體不再以傳統的順序充填模式充滿型腔,充填模式的改變可能是形成氣孔的主要原因。本研究以該塑料齒輪成型為研究對象,探索充填模式與注射速度之間的關系,分析氣孔的形成機理。塑件脫模后在室溫下放置1h,然后沿軸向剖開,確定氣孔位置及尺寸。
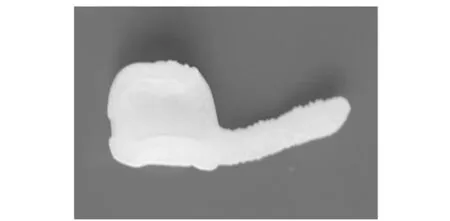
圖2 斜齒輪短射的實驗結果Fig.2 Short shot image for skew gears
當熔體以200mm/s速度注射時,入口處雷諾數Re=0.00136、黏性力54300Pa、慣性力1446Pa,黏性力遠遠大于慣性力,熔體流動處于壓力驅動模式,熔體由近到遠順序充滿整個型腔,如圖3(a)所示。當熔體速度提高1倍,剪切速率也相應增加1倍,受剪切變稀影響,熔體黏度降低了42%,于是,入口處雷諾數Re=0.00468,黏性力63360Pa,慣性力17054Pa,雖然黏性力仍大于慣性力,但屬于同一量級,慣性力的作用逐漸顯現,與低速流動相比,慣性力使熔體沿流長方向前進了更長的距離,如圖3(b)所示。當熔體流速提高到800mm/s時,剪切速率進一步增大,黏度降低了66%,入口處雷諾數上升到0.016、黏性力73992Pa、慣性力173349Pa,慣性力大于黏性力,熔體在慣性力作用下快速向前充填,進入較大空腔后呈噴射狀態,快速達到型腔末端,如圖3(c)所示。由此可見,注射成型充填過程中聚合物熔體的流動形態是黏性力與慣性力相互競爭的結果,與注射速度、型腔尺寸、材料特性等密切相關,對于給定的材料及制品尺寸,當注射速度提高到某一臨界值后,熔體將沖破黏性力的束縛轉入噴射充填模式。雖然控制方程中加入了表面張力的貢獻,但只有當塑件尺寸足夠小時表面張力效應才會顯著,對于本文研究的塑件,表面張力在斜齒上達到最大(132Pa),但遠小于黏性力和慣性力,對充填速度、流動模式基本沒有影響。
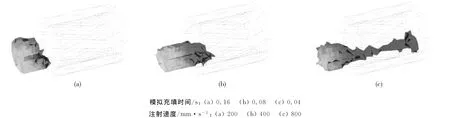
圖3 不同注射速度時的充填模式.Fig.3 Filling mode corresponding to different filling speed
當熔體以800mm/s高速進入型腔時,慣性力較大,占主導地位。由于齒輪上部厚度較小(1.65mm),受邊界上黏性力束縛熔體仍然向橫向充填,但在流動方向充填的長度大于橫向充填寬度。而熔體進入較大空腔后(帶齒厚度2.6mm),流動處于慣性驅動模式,熔體以較細的射流噴入型腔,由于網格不完全對稱,熔體噴射出現了輕微擺動。隨著流長的增長和溫度的降低,流動阻力增大,流速減小;另一方面,澆口周圍的壓力增大,壓力梯度也隨之增大,熔體在壓力驅動下向周圍空腔充填,所以,充填呈現出噴射與順序注射共存的現象,如圖4(a)所示。熔體到達底部后開始堆積,形成反向充填,位于澆口一側熔體流速較快,反向充填速度、充填體積也較大,易形成鋸齒狀流動前沿,如圖4(b)所示。隨著充填熔體的增多,充填阻力持續增加,充填速度逐漸下降,慣性力降低,流動又回到壓力驅動模式,熔體按距離澆口遠近由近到遠順序向前充填,并與前期噴射的熔體匯合,在交匯處空隙較大的地方形成裹氣,如圖4(c)所示。當熔體持續充填,將型腔中的氣體擠壓至流動末端,由分模面排出,同時將不能順暢排出的氣體包裹形成氣孔,如圖4(d)所示。
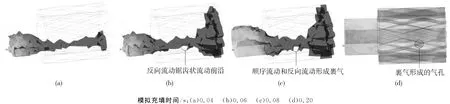
圖4 高速(800mm/s)充填過程中熔體前沿的演化Fig.4 Evolution of melt front advancement during filling stage of high speed injection(800mm/s)
從以上分析及模擬結果可以看出,裹氣的形成與注射速度有密切關系。當注射速度較低時,慣性力比黏性力小,熔體處于順序充填模式,全部氣體從分模面排出,不會形成裹氣。只有當注射速度足夠大時,慣性力才大于黏性力,形成噴射,也只有噴射足夠強時,熔體射到底部后才能持續堆積,形成反向充填,與后續順序充填的熔體匯合形成裹氣。同時,位于澆口一側的反向充填、順序充填速度均高于其他位置,反向充填速度越高越易于形成鋸齒狀的流動前沿,產生較大的孔隙,也易于與后續高速順序充填的熔體在邊界處匯合形成空腔,從而包裹其中的氣體,形成氣孔。因此,只有高速注射時,熔體才能改變順序充填模式,在反向充填與順序充填最前端的前鋒面處形成裹氣,如圖5(a)所示。采用本研究方法模擬的氣孔位置與實際加工的氣孔位置[見圖5(b)]基本一致,然而,由于本研究數學模型中沒有考慮氣體的可壓縮性及計算熔體密封氣體之后的充填及保壓階段熔體持續流動產生的氣孔變形,所以模擬的氣孔形狀與實際結果有差異。
5 結論
(1)當注射速度達到某一臨界值后,慣性力大于黏性力,熔體在流動方向的充填速度大于橫向充填速度,并在較大空腔處形成噴射,微注射成型中熔體的流動模式與材料特性、型腔尺寸和注射速度密切相關;
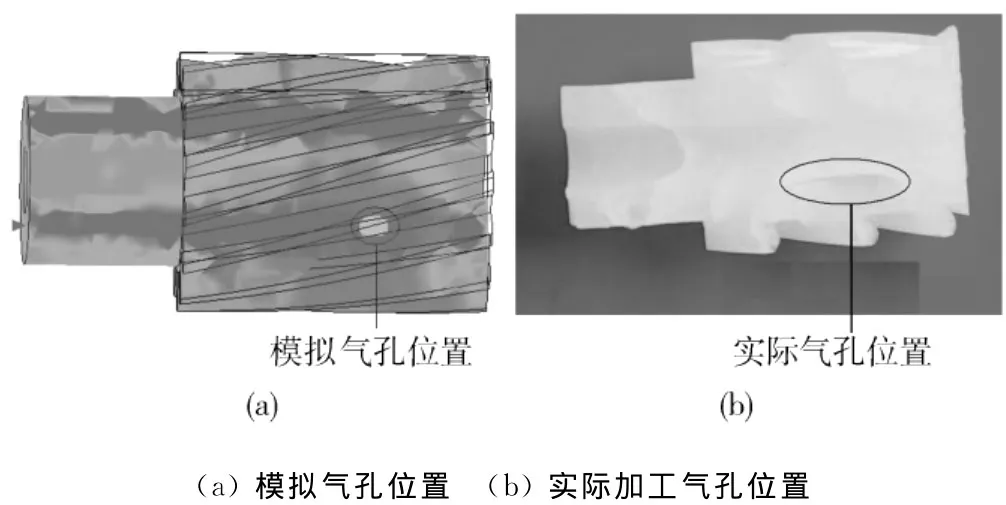
圖5 模擬的氣孔位置與實際加工的氣孔位置Fig.5 Air trap locations with simulation and manufacture
(2)在高速微注射成型的充填初期,熔體的速度高、慣性大,熔體以噴射的方式流入較大空腔,由于微成型制品尺寸較小,熔體快速噴至型腔末端,并開始堆積,形成反向充填;隨著流動阻力的增大,熔體流動速度降低,熔體流動又轉向常規的順序充填,反向充填與順序充填的熔體前沿在匯合處包裹空氣,形成氣孔。
[1] D Yao,B Kim.Simulation of the Filling Process in Microchannels for Polymeric Materials[J].J Micromech Microeng,2002,12:604-610.
[2] S W Kim,L S Turng.Three-dimensional Numerical Simulation of Injection Molding Filling of Optical Lens and Multi-scale Geometry Using Finite Element Method[J].Polymer Engineering and Science,2006,46:1263-1274.
[3] S J Choi,S K Kim.Multi-scale Filling Simulation of Micro-injection Molding Process[J].J Mechanical Science and Technology,2011,25(1):117-124.
[4] W Cao,S Gan,S Ye,et al.Study on Air Accumulation and Influence on Flow Balance in Micro-injection Molding[J].J Manufacturing Science and Engineering,2011,133:401-406.
[5] C A Griffiths,S S Dimov,S Scholz,et al.Cavity Air Flow Behavior During Filling in Microinjection Molding[J].J Manufacturing Science and Engineering,2011,133:601-610.
[6] 李帥君,熊守美.應用兩相流模型模擬壓鑄充型過程的卷氣現象[J].金屬學報,2009,45(10):1153-1158.Li Shuaijun,Xiong Shoumei.A Two-phase Flow Model for Simulaiting Air Entrapment During Mold Filling of High Pressure Die Casting Process[J].Acta Metallurgica Sinica,2009,45(10):1153-1158.
[7] 張明遠,陳立亮,龐盛永,等.基于投影-水平集方法充型過程氣-液兩相流數值模擬[J].鑄造,2010,59(5):478-481.Zhang Mingyuan,Chen Liliang,Pang Shengyong,et al.Numerical Simulations of Gas-liquid Two-phase Flow During Filling Process Based on Projection Level Set Method[J].Foundry,2010,59(5):478-481.
[8] G W M Peters,F P T Baaijens.Moldeling of Non-isothermal Viscoelastic Flows[J].J Non-Newtonian Fluid Mechanics,1997,68:205-224.
[9] Arjen C B Bogaerds,Wilco M H Verbeeten,Gerrit W M Peters,et al.3DViscoelastic Analysis of a Polymer Solution in a Complex Flow[J].Comput Methods Appl Mech Engrg,1999,180:413-430.
[10] M Sussman,P Smereka,S Osher.A Level Set Approach for Computing Solutions to Incrompressible Two-phase Flow[J].J Comput Physics,1994,114:146-159.
Study on Melt Filling Mode and Trapping Air Mechanism in High Speed Micro-injection Molding
ZHANG Shixun1,CAO Wei1,YE Shubing2,LI Qian1,SHEN Changyu1
(1.APPT NERC,Zhengzhou University,Zhengzhou 450002,China;2.Shenzhen Zhaowei Machinery and Electronics Co,Ltd,Shenzhen 518103,China)
In order to simulate the melt flow and melt front more precisely,mathematic models of coupled melt and air flows were formulated in terms of two phase flow theory.A viscoelastic model rather than conventional viscous model was employed to represent the relationship between stress and shear rate.The melt front was tracked using level set method.Based on the proposed mathematic models and numerical methods,three types of flows and filling modes for low-,medium-,and high-speed micro-injection molding were investigated.In addition,the mechanism of air-trapping was analyzed and the possible location of trapped air was predicted.To verify the validity of the proposed method,a skew gear was designed and manufactured using high speed micro-injection molding.The actual trapped air location was in good agreement with the simulated results.This study showed that the filling mode depended on injection speed,material characters,and cavity size.The air-trapping was likely to occur at the jetting mode.
micro-injection molding;two phase flow;filling mode;viscoelastic model
TQ320.66+2
B
1001-9278(2012)01-0065-06
2011-10-28
國家自然科學基金資助項目(10872185);河南省重大公益項目[HNZB(2010)N91號]
聯系人,zsxzzu@zzu.edu.cn
(本文編輯:趙 艷)
