近地軌道電磁編隊飛行相對軌道動力學建模
2012-11-16 08:09:22侯振東曹喜濱張錦繡
哈爾濱工業大學學報 2012年3期
關鍵詞:模型
侯振東,曹喜濱,張錦繡
(哈爾濱工業大學 衛星技術研究所,150080 哈爾濱,hzd1988120@126.com)
衛星編隊飛行技術是近幾年提出的空間科學領域的新技術,具備系統成本低、性能好、可靠性高和適應性強等優點.但由于地球扁率、大氣阻力等影響,通常需要附加作用力與力矩對成員衛星的相對位置與姿態進行控制.傳統采用的噴氣推進由于能量消耗,影響編隊飛行壽命,且推力器排出的羽流可能污染鄰近衛星的光學器件表面.而電磁編隊飛行(EMFF)利用通電線圈產生的電磁力來實現編隊構型的保持與控制,并由太陽能提供機動能量,且不存在羽流污染,在編隊飛行中將會有很大的應用前景.
自電磁編隊飛行的概念提出以來,國內外學者進行了先期探索和研究,取得了部分成果.其中,Schweighart[1]提出了近場、中場和遠場三種電磁力模型.Hashimoto[2]與Kaneda[3]等分析了低地球軌道(LEO)的電磁編隊飛行動力學模型,并對在同一平面運行的相對距離固定的雙星系統進行了詳細分析.Elias[4]提出了電磁編隊飛行的通用非線性動力學模型,對衛星星體、飛輪、電磁體以及飛輪和星體的連接部分都建立了數學模型.Elias[5]還研究了穩定旋轉的雙星系統動力學,該雙星系統繞其質心旋轉,同時徑向距離保持恒定,維持這種運動的徑向力由電磁力提供,在論述中作者將非線性動力學模型在理想軌跡附近線性化,并進行了穩定性分析.
本文假設編隊系統中每顆衛星都安裝3 個正交的通電線圈,通過改變每個線圈的電流大小、方向,可產生任意大小、方向的電磁控制力與力矩,實現編隊構型的保持與控制.另外星體上還安裝3 個正交的飛輪,用來控制星體姿態.產生電磁體的激勵電流和飛輪旋轉所需的能源由太陽帆板提供.本文在此基礎上,考慮大氣攝動、地球扁率J2攝動,建立電磁編隊飛行的非線性相對軌道動力學模型,并對相對軌道動力學方程進行線性化,得到參考坐標系下的線性化相對軌道動力學方程.
1 坐標系定義
為敘述方便,建立以下4 種直角坐標系.坐標系示意圖見圖1.

圖1 坐標系定義
地心慣性坐標系FI:原點在地心Oe;XI軸指向赤道平面與黃道平面相交接線的升交點(即春分點);地球自轉軸為ZI;選擇YI使其與XI、ZI滿足右手坐標.
主星參考坐標系Fr:原點在主星質心Or;Yr軸沿地心與主星的連線方向,指向主星;Xr軸指向主星速度方向;Zr軸與Xr、Yr構成右手坐標系,指向軌道面負法線方向.
衛星軌道坐標系Fo:原點在衛星質心Oo,各軸指向類似于主星參考坐標系,只不過衛星軌道坐標系針對的是相應的衛星,而非主星.
線圈安裝坐標系Fm:原點在衛星質心Om(即Oo);Xm、Ym、Zm三軸分別沿星上3 個正交的通電線圈平面的法線方向.
為敘述方便,記編隊衛星數目為n,編號依次為0,1,2…,n-1,其中衛星0 為主星.
2 任意兩星間電磁力建模
電磁編隊飛行的電磁力由衛星上的通電線圈產生.如果用fij表示衛星B 上第j 個線圈產生的磁場對衛星A 上第i 個線圈的作用力,則兩顆衛星間的電磁力為
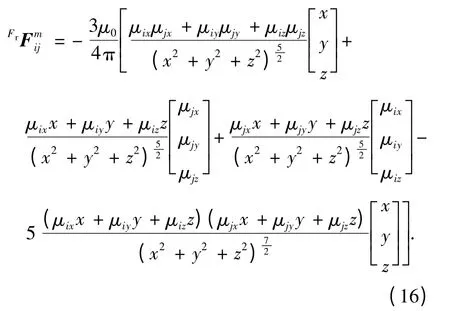
參照文獻[1],建立遠場模型.以任意兩顆衛星i 和j 為例,記μi為衛星i 的磁偶極子矢量,μj為衛星j 的磁偶極子矢量,μ0為真空磁導率,Rij=Rj-Ri為兩顆衛星的相對矢徑,Rij為相應距離.則衛星j 對衛星i 的電磁力與電磁力矩分別為
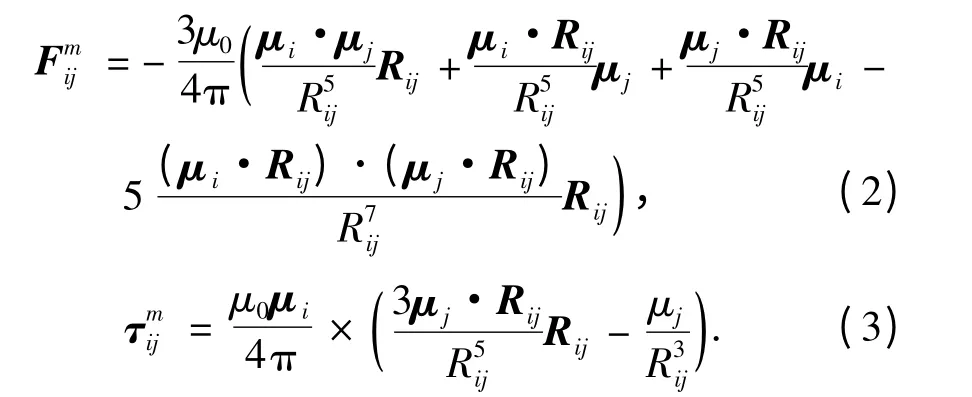
為便于分析,假設以反作用飛輪完成衛星的姿態控制,在建模過程中暫不考慮電磁力矩對相對軌道運動的影響.
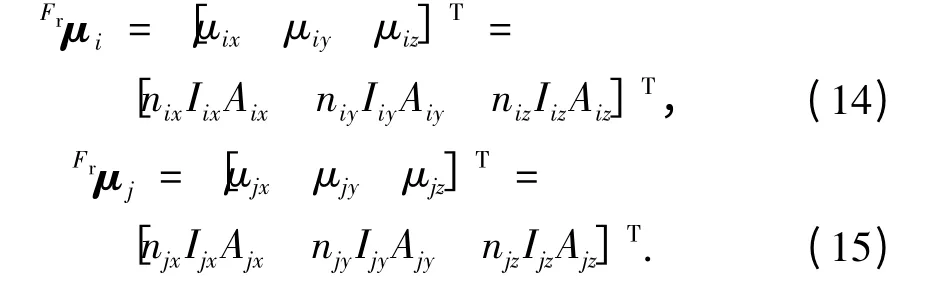
式(2)中,μi在安裝坐標系下可表述為

式中:nix表示安裝坐標系Xm軸的線圈匝數;Iix表示Xm軸的電流強度;Aix表示Xm軸的線圈所圍面積;Fm表示分量所在坐標系,其他符號的意義依此類推.
采用zxy 順序的歐拉角轉換形式,衛星i 的軌道坐標系到安裝坐標系的坐標轉換矩陣為

采用zxz 順序的歐拉角變換,地心慣性坐標系到衛星i 的軌道坐標系的坐標轉換矩陣為
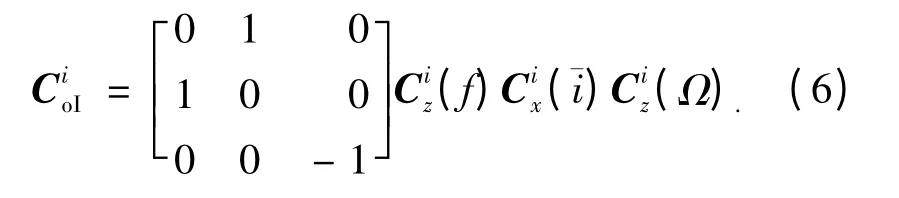
式中Ω 為衛星的升交點赤經,ˉi 為軌道傾角,f 為緯度幅角.
由參考坐標系的定義可知,地心慣性坐標系到主星參考坐標系的轉換矩陣與式(6)相似.
由公式(5)、(6)可得μi在地心慣性坐標系下的表達式為

式中μj在地心慣性坐標系下的表述與μi類似.將公式(5)~(7)代入式(2),可得衛星j 對衛星i 的電磁力在地心慣性坐標系下的分量形式,將作為仿真程序的理論基礎.
由式(2)~(7)可見,兩顆衛星間的電磁力與兩星的磁偶極子相耦合,與相對距離的四次方成反比,具有強烈的非線性.而磁偶極子是兩顆衛星姿態及線圈電流的函數(一般情況下線圈匝數與所圍面積是常數).結合電磁力產生的機理與公式分析可知,任意兩星間的電磁力是兩星相對位置、相對姿態及各線圈電流的1 個非線性函數.


同理,將式(9)代入式(2)中,可得衛星j 對衛星i 的電磁力在主星參考坐標系下的分量形式.
理論上編隊衛星所受的電磁力應包括地磁場的作用.但由參考文獻[6]可知,在軌道高度不低于200 km,編隊距離幾十米的情況下,地磁場對衛星的電磁力至少比兩星相互作用的電磁力小1 個數量級,因此在電磁力建模時可以忽略地磁場對衛星的影響.
3 線性化相對軌道動力學模型建立
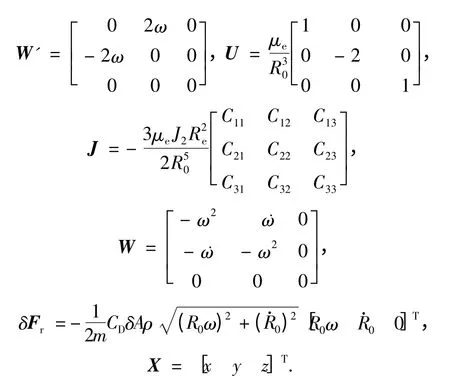
相對軌道動力學方程建立在參考坐標系下.參照希爾方程,可得衛星i 的相對軌道動力學方程為
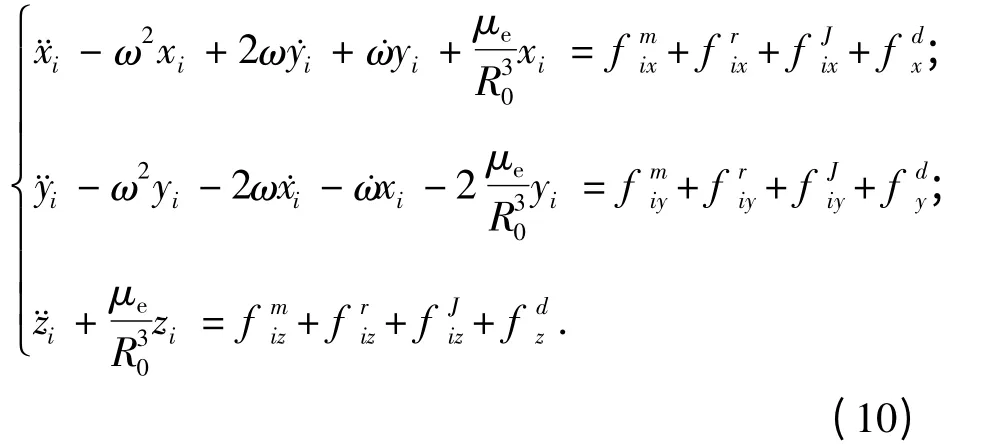
式中:ω 為主星軌道角速度;μe為引力常數;m 為衛星質量;R0為主星地心距;且
3.1 電磁力線性化
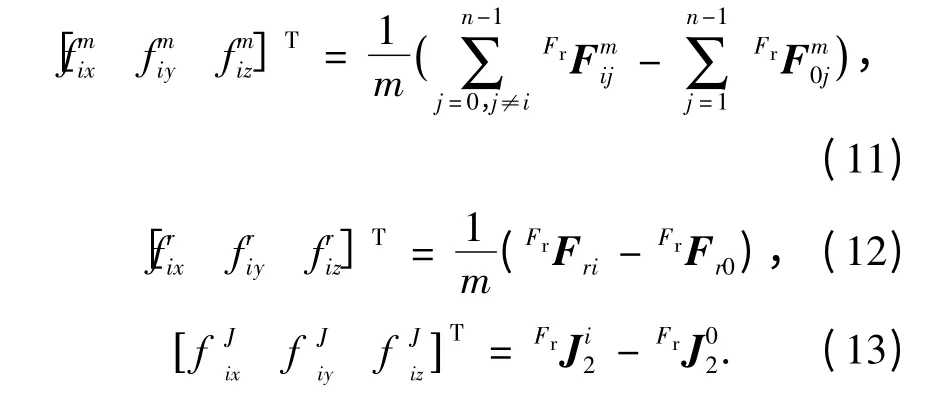
在多顆衛星(多于兩顆)的電磁編隊飛行中,每兩顆衛星之間都會產生電磁力.多顆衛星編隊的電磁力實質上是任意兩顆衛星間電磁力的疊加.為方便起見,本文先研究雙星編隊系統,兩顆衛星標號為i、j.由坐標系定義可知,衛星0 為主星.這里以衛星i 為主星來分析衛星i、j 之間的電磁力線性化方法.由于衛星姿態由飛輪協同控制,理論上可將衛星姿態穩定在任意方位.為方便討論,假設在飛輪作用下,各衛星的線圈安裝坐標系與主星參考坐標系指向重合.在參考坐標系下記Rij=[x y z]T.由式(9)可得:
由式(14)、(15)及式(2)可得到在上述假設條件下的電磁力表達式為

利用泰勒定理對Fmij在理想點

展開得

由式(19)可知,根據某一理想點S0可求出任意S 處的電磁力,電磁力簡化為S 的線性函數.但這一表述基于泰勒展開定理,舍去二階以上表達式,只在S-S0較小時精確成立.因此為達到精度要求,實際應用中需要實時校正理想點S0.
下面推導n 顆衛星相互作用時電磁力的線性化.先假定有多顆主星,表述時以衛星i為主星,按上述方法可表述如下:

記
為線性化的常數項.
由式(21)可知,多顆衛星的電磁編隊飛行中電磁力的線性化表述還有坐標轉換矩陣的影響,增加了電磁力表達式的耦合性.這是由電磁力的作用機理決定的,給實際應用帶來困難.對于多星電磁編隊飛行的電磁力線性化,本文只做初步的分析總結.
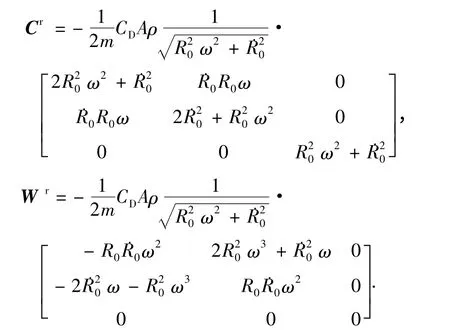
3.2 氣動力線性化
假設n 顆衛星氣動參數的CD和密度ρ 均相同,有一定的面質比偏差.記主星迎流面面積為A,衛星i 迎流面面積為A+δA.則衛星i 的氣動阻力在主星參考坐標系下表述為

分別對式(22)中的[˙x ˙y ˙z]T、[x y z]T、δA求梯度,可導出
其中:
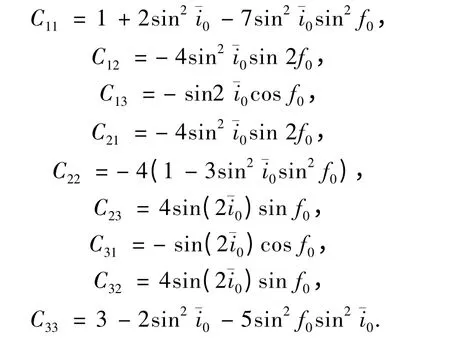
3.3 J2 攝動線性化
結合本文的坐標系定義,對參考文獻[7]的公式略作修改,可得
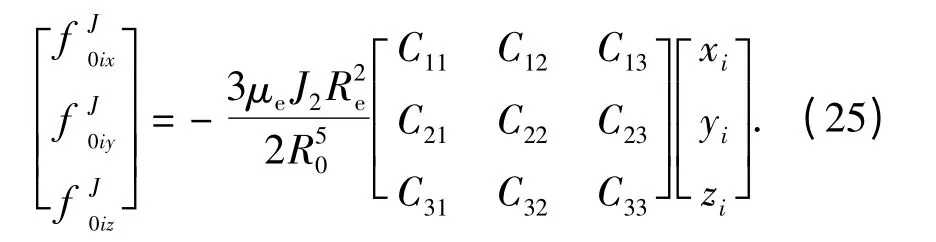
式中:
3.4 相對軌道動力學方程最終表述
略去未知干擾項,由式(10)~(25)可得衛星i 在主星參考坐標系下的線性化相對軌道動力學方程為
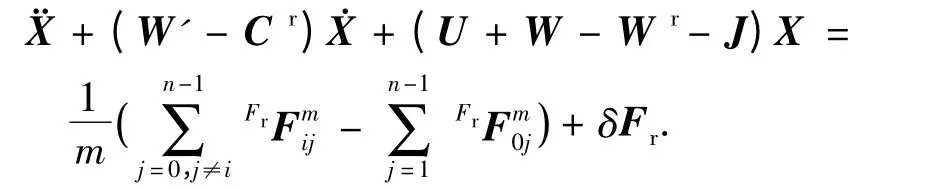
其中:
針對兩顆衛星的電磁編隊飛行,略去未知干擾因素,公式可簡化為
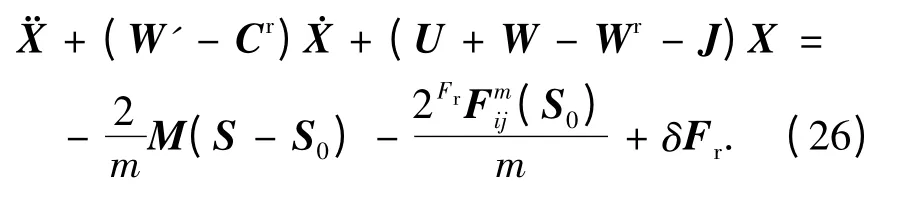
式(26)是相對位置[x y z]T及控制量[IixIiyIizIjxIjyIjz]T的線性微分方程組,對控制算法設計及其他理論分析帶來便利.
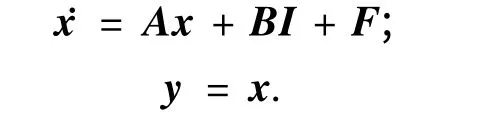
經分析,式(26)還可整理為狀態空間的表達形式.選狀態變量為控制量I =[IixIiyIizIjxIjyIjz]T.式(26)的狀態空間描述如下:
其中:
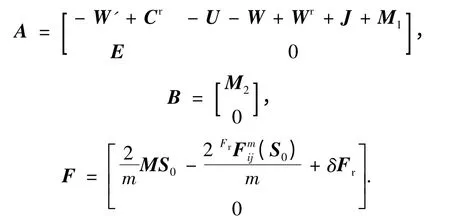
式中:E 為3×3 階單位矩陣;M1M2為矩陣-2M/m 的子式,且-2M/m=[M1M2],M1為3×3 階矩陣,M2為3×6 階矩陣;F 為常數向量.
4 仿真及結果分析
為考核線性化相對動力學模型的可用性及精度,對線性化相對軌道動力學模型與未線性化軌道動力學模型分別進行仿真分析.仿真中設定主星與從星各軸線圈匝數、所圍面積相同.大氣密度查表可得.表1 給出初始時刻兩顆衛星的軌道參數.兩顆衛星的其他設計參數見表2.軌道參數的選擇以構成串行編隊為約束,衛星間距約為20 m.不失一般性,從星的三軸電流均設為I =I0+δI=[2000+100sin(πt)]A,主星的三軸電流均設為I0=2 000 A.
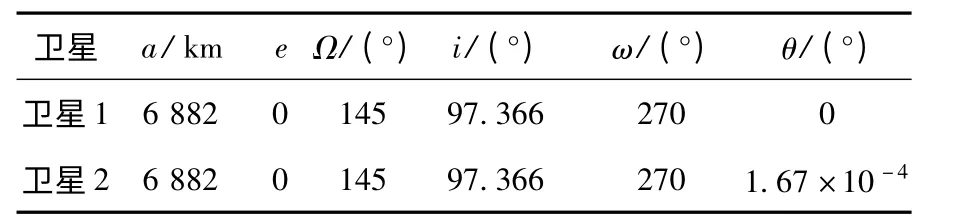
表1 衛星軌道參數
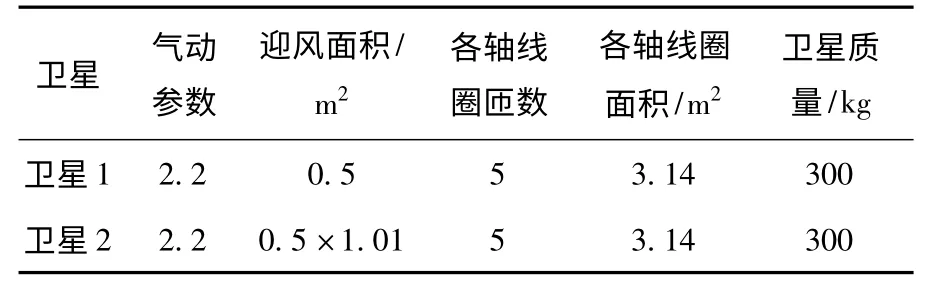
表2 衛星其他設計參數
在上述條件下對線性化與非線性的動力學模型進行仿真,電磁力線性模型與非線性模型的變化曲線見圖2.線性模型與非線性模型的運動情況見圖3.
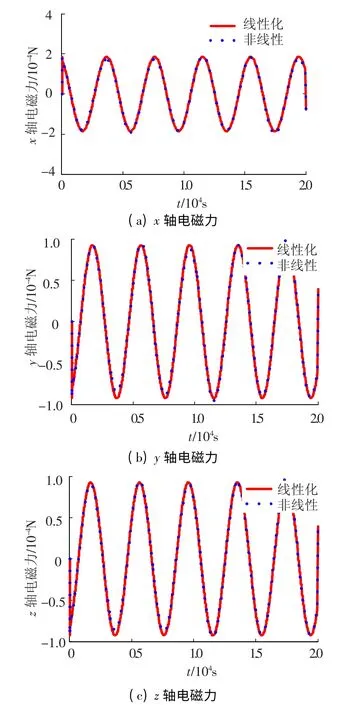
圖2 電磁編隊線性模型與非線性模型的電磁力對比
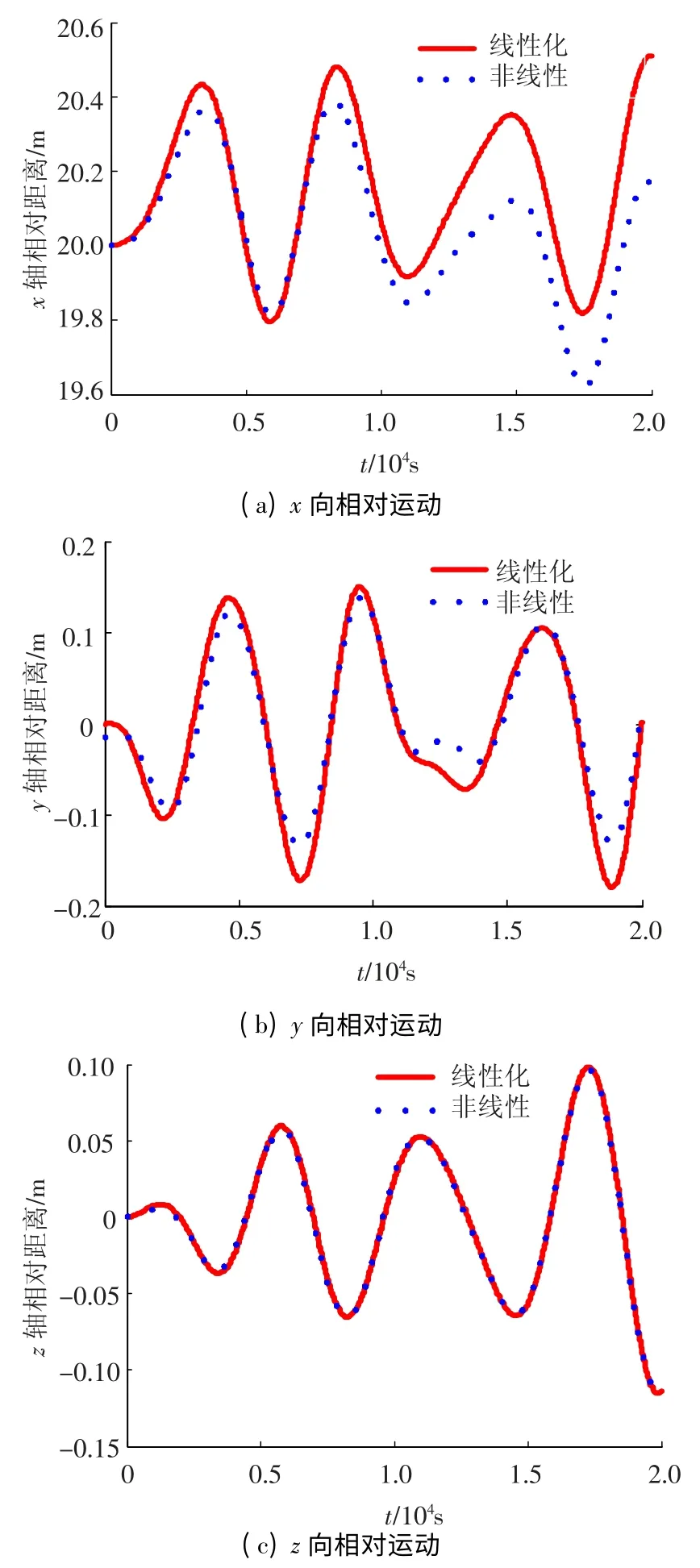
圖3 電磁編隊線性模型與非線性模型精度對比
由圖2 可見,在20 000 s 的仿真時間內,電磁力線性模型與非線性模型計算值幾乎一致,誤差不超過10%,說明電磁力線性化是合理的.
由圖3 可見,在20 000 s 的仿真時間(衛星軌道周期約5 900 s,即衛星運行3 個周期多)內,線性模型與非線性模型運行軌跡幾乎重合,線性模型與非線性模型的主從星相對運動在主星參考坐標系的y、z 兩軸誤差不會發散,x 軸誤差逐漸發散,在仿真結束時有0.3 m 的誤差.單獨分析電磁力、J2攝動等每一項單獨作用力線性化對模型精度的影響.仿真結束時,電磁力線性化可使模型誤差達0.2 m,其他作用(氣動阻力線性化、J2攝動線性化及Hill 方程誤差)對模型精度影響不超過0.1 m.
為考察不同軌道高度與不同衛星質量對模型精度的影響,設置軌道高度分別為6 600 km、6 882 km、7 400 km,衛星質量分別為100 kg、300 kg、500 kg,做9 組仿真實驗.鑒于x 軸誤差為主要誤差,圖4 給出各種情況下的線性化模型與非線性模型的x 軸誤差.由圖4 可見,誤差隨衛星質量的減小而增大,這是因為在一定的電磁力線性化誤差下,小質量衛星受到的電磁加速度誤差更大.減小線圈電流可以減小輕質量引起的誤差.圖4 還表明軌道越高,誤差越小.分析認為高軌道衛星受大氣阻力、J2攝動的影響較小,電磁力對相對位置的影響變大,使得模型對電磁力線性化的誤差更為敏感.
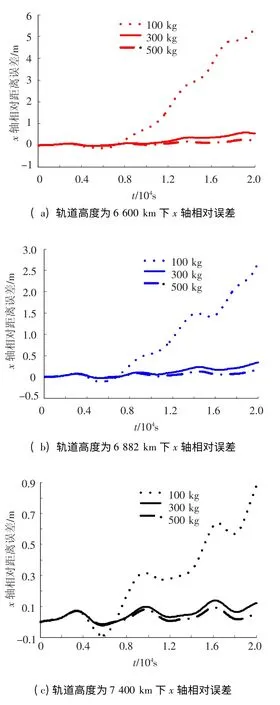
圖4 不同軌道高度與衛星質量情況下的x 軸誤差
仿真結果還表明這9 組實驗中x 軸誤差主要由電磁力線性化產生,但篇幅有限,沒有列出仿真圖.
綜上所述,本文建立的電磁編隊線性化軌道動力學模型在低軌道(200 ~1 000 km)、小衛星(100 ~500 kg)、編隊距離20 m 左右、激勵電流幾千安的條件下是合理的,仿真結束時誤差在0.05 ~5 m 范圍內.且誤差主要來自于電磁力線性化.為電磁編隊飛行動力學的進一步研究提供參考,也可作為控制研究的理論基礎.
5 結 論
本文以基于磁偶極子假設的遠場模型為基礎,在考慮大氣攝動、地球扁率J2攝動的條件下推導了電磁編隊飛行的非線性相對軌道動力學模型,并在一定條件下,對動力學方程線性化,最終得到基于Hill 方程的線性化相對軌道動力學方程.利用Matlab/Simulink 對電磁編隊線性模型與非線性模型進行建模仿真,結果表明本文建立的線性化相對軌道動力學與精確的非線性模型很好吻合,x 軸相對運動有累積誤差,誤差主要源于電磁力線性化,且誤差在一定的運行時間內很小.
由本文分析可知,線性化模型結構清晰,形式簡單,便于獨立分析各控制變量作用,有利于更成熟的線性控制方法的應用.非線性模型精度高,但結構復雜,控制算法設計上有困難.本文的線性化模型合理可行,結果將為電磁編隊飛行的控制研究奠定理論基礎.
[1]SCHWEIGHART S A,SEDWICK R J.Propellantless formation flight operations using electromagnetic formation flight[C]//SpaceOps 2006 Conference.Rome,Italy:[s.n.],2006:1-38.
[2]HASHIMOTO T,SAKAI S,NINOMIYA K,et al.Formation flight using super-conducting magnets[C]//International Symposium of Formation Flying Missions and Technologies.Toulouse,France:[s.n.],2002:3-10.
[3]KANEDA R,YAZAKI F,SAKAI S,et al.The relative position control in formation flying satellites using superconducting magnets[C]//2nd International Symposium on Formation Flying Missions and Technologies.Washington,DC:[s.n.],2004:3-5.
[4]ELIAS L M.Dynamics of multi-body space interferometers including reaction wheel gyroscopic stiffening effects:structurally connected and electromagnetic formation flying architectures[D].Combridge,MA:Massachusetts Institute of Technology,2004:1-23.
[5]ELIAS L M,KWON D W,SEDWICK R J,et al.Electromagnetic formation flight dynamics including reaction wheel gyroscopic stiffening effects[J].Journal of Guidance,Control,and Dynamics,2007,30(2):499-511.
[6]AHSUN U,MILLER D W.Dynamics and control of electromagnetic satellite formations[D].Cambridge,MA:Massachusetts Institute of Technology,2007:1-58.
[7]SCHWEIGHART S A.Development and analysis of a high fidelity linearized J2model for satellite formation flying[D].Cambridge,MA:Massachusetts Institute of Technology,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19