基于主從控制策略的微網穩定性研究
2012-11-14 02:03:32張振良李秀錦
河北電力技術 2012年2期
關鍵詞:控制策略
張振良,李秀錦
(1.衡水供電公司,河北 衡水 053000;2.衡水桃城供電有限責任公司,河北 衡水 053000)
0 引言
隨著分布式發電技術的迅猛發展,作為大電網的有益補充與微型發電裝置的有效利用形式,微網(microgrid)這一概念已經引起各國學者的廣泛關注[1-6]。美國電氣可靠性技術解決方案聯合會(Consortium for Electric Reliability Technology Solutions,CERTS)給出的定義為:微網是一種由負荷和微型電源共同組成的系統,它可同時提供電能和熱量;微網內部的電源主要由電力電子器件負責能量的轉換,并提供必需的控制;微網相對于外部大電網表現為單一的受控單元,并可同時滿足用戶對電能質量和供電安全等的要求[3]。微網具有獨立性、靈活性、交互性、經濟性的特點。
目前已有的微網僅為一些小型示范性工程或實驗平臺,要真正應用與推廣還有許多關鍵技術及相關問題亟待解決。國內外已經針對微網開展了多方面的研究工作,主要包括分布式電源模型分析、微網控制、微網孤島檢測與保護、微網經濟性等方面工作[7-14]。
微網靈活的運行方式與高質量的供電服務, 離不開完善的穩定與控制系統,控制問題是微網研究中的一個難點問題。文獻[15]設計的聯網分布式電源(DG)綜合控制器采用直流電壓波動前饋補償的串級雙環PI控制結構,積極配合原動機的調節,提高了電能質量水平,但仍局限于單個分布式電源的仿真分析。文獻[16-17]對微網中DG的預同步和均流問題給出了解決方案,詳細分析了并網條件對并網質量的影響。文獻[18]總結了目前世界范圍內的微網發展狀況, 深入分析了微網實驗室和示范工程的結構和控制模式,依據國外微網實驗室和示范工程的建設經驗給出了對中國微網建設具有指導意義的建議。
以下在分析不同微源特性及其數學模型的基礎上,根據經典的微網控制方法[3,5]在PSCAD/EMTDC中搭建微網等效模型進行仿真,重點研究單主和多主控制策略下微網的電壓和頻率穩定性,為將來微網控制策略應用于實驗平臺奠定基礎。
1 微網系統結構
微網中的電源多為微電源(簡稱“微源”),微網系統結構示意見圖1。在圖1中,微源由燃氣輪機、光伏電池、燃料電池以及風力發電機組成。光伏系統和燃氣輪機接入饋線1;燃料電池和風力發電機接入饋線2。饋線通過主分隔裝置(通常是一個靜態開關)與配電系統相連, 可實現孤網與并網運行模式間的平滑切換,該開關點即PCC所在的位置。IEEE P1547.8(草案)規定在PCC處, 微網的各項技術指標必須滿足預定的規范。
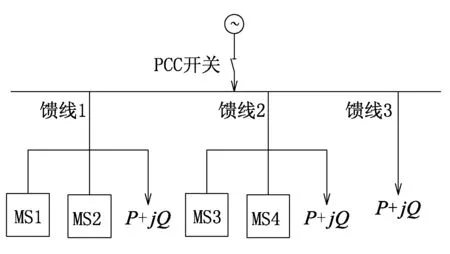
圖1 微網系統結構
在正常運行方式下,饋線1 中發電容量大于正常負荷需求,潮流呈向上送的趨勢,饋線2中負荷需求大于發電容量,需系統給該饋線供電;饋線3中為一般負荷,基本由配電網供給,在緊急情況下亦可切除。
2 微網主從控制策略
微網的基本運行依賴于各個微源,微源在聯網和孤島2種運行狀態下的控制方式是不同的。微網控制應當保證:任一微電源的接入不對系統造成影響;自主選擇運行點;平滑的與電網并列、分離;對有功、無功進行單獨控制;具有校正電壓跌落和系統不平衡的能力。
2.1 控制方式
微網的主從控制模式是指微網的控制系統中某一個控制器為主控制器,其余為從控制器的控制方式,主要應用于孤網運行模式下[19]。對于大量采用電力電子逆變器的微網系統,通常有3種控制方式:聯網狀態下的恒功率(PQ) 控制方式,孤島狀態下的下垂(Droop)控制方式和電壓頻率(Vf)控制方式[16]。由于孤網運行時,主網無法提供給微網電壓和頻率支撐,微網內必須至少存在一個微源作為主微源(master)為微網系統提供電壓和頻率支撐。當微網內僅有一個微源作為master時稱為單主控制,master必須具有足夠大的容量來承擔功率差額,可采用Droop控制或Vf控制;當微網內有2個或2個以上微源作為master時稱為多主控制,master需采用Droop控制或考慮容量限制的Vf控制方式。
2.1.1 PQ控制
微網并網運行時,系統電壓和頻率由主網提供支撐,各個微源維持恒定出力。由給定的有功功率和無功功率參考計算出電流參考值進行控制,等效控制圖見圖2。該控制方式需要系統中有維持電壓頻率的分布式電源。
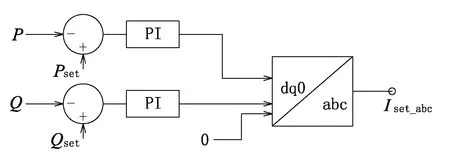
圖2 PQ控制器框圖
2.1.2 Droop控制
下垂控制方式模擬傳統發電系統的一次調頻特性,當微網孤網運行時,微源迅速按各自容量比例分擔負荷、抑制干擾。圖3給出了2個不同容量的微源下垂特性示意圖。可以看出,微源通過調整各自輸出電壓的頻率和幅值,使其降低到一個新的穩定工作點,從而實現輸出功率的合理分配。如果微源的下垂斜率相等,則在穩定后各微源的輸出功率相等;如果下垂斜率不相等,則斜率大的承擔功率小,斜率小的承擔功率大[16]。此控制方式一般用于分布式電源接入逆變器的控制。
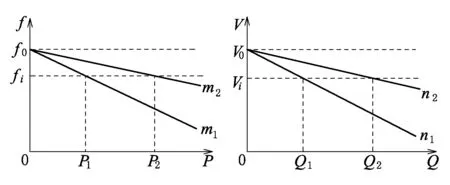
(a) 有功功率-頻率 b) 無功功率-電壓
2.1.3 Vf控制
電壓頻率控制方式由下垂控制方式發展而來,通過設定電壓和頻率參考值,在 PI 調節器作用下實時檢測逆變器輸出端口電壓和頻率,并作為恒壓、恒頻電源使用,控制方式如圖4 所示[20]。如果存在2個Vf控制電源,則需要考慮其容量限制,否則會出現電源爭搶出力的情況。此控制方式一般用于在主從控制策略中主分布式電源的控制中。
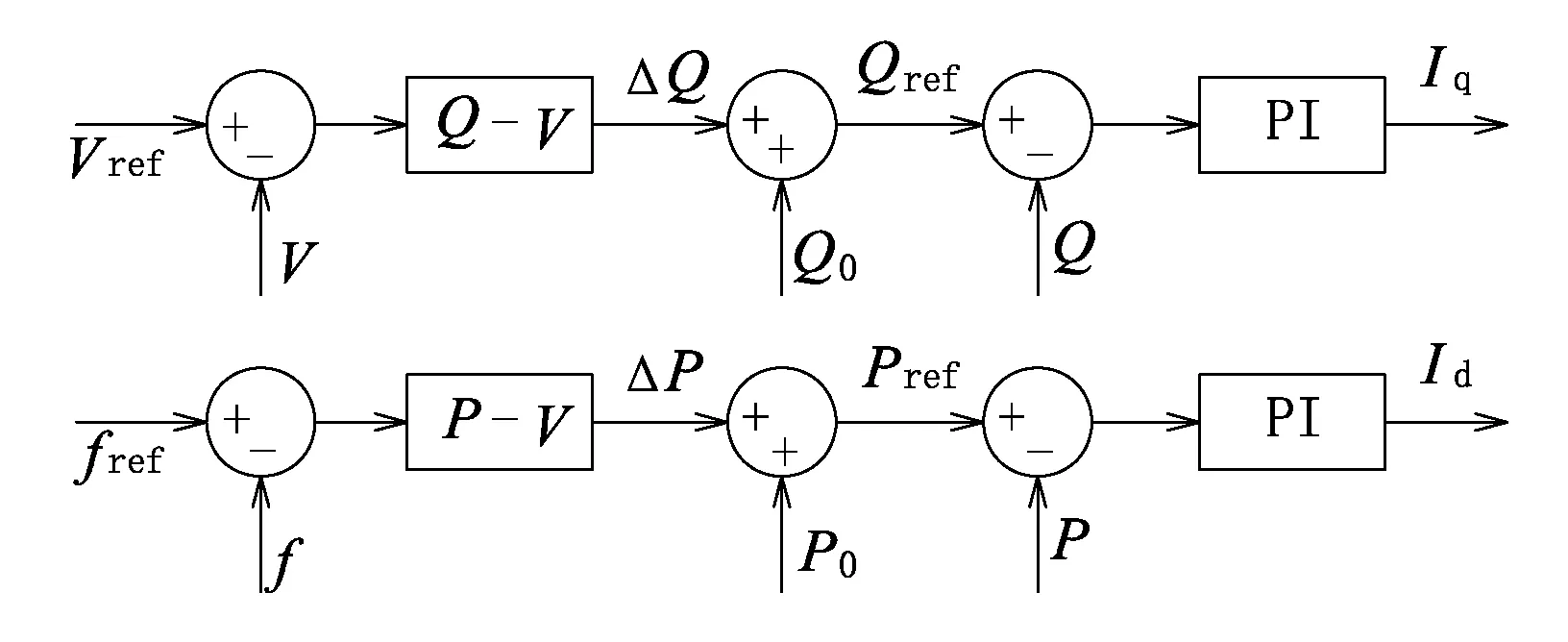
圖4 Vf控制器框圖
2.2 控制過程
a. 當檢測電源檢測到孤島或者電網主動從配電網斷開,進入孤島運行模式時,微網控制切換到主從控制模式,通過調整各個微源的出力來達到功率的平衡。
b. 當微網負載變化時,首先由主電源自動根據負荷變化調節輸出電流,增大或者減小輸出功率;同時檢測并計算功率的變化量,根據現有的發電單元的可用容量來調節某些從屬單元的設定值,增大或減小它們的輸出功率;當其他電源輸出功率增大時,主電源輸出相應的自動減小,從而保證主電源始終有足夠的容量來調節瞬時功率的變化。
c. 當電網中無可調用的有功或無功容量時,只能依靠主單元來調節,當負荷增加時,根據負荷的電壓依賴特性,可以考慮適當減小電壓值;如果仍然不能實現功率平衡,可以采取切負荷的措施來維持微網的運行。
2.3 影響因素
主從控制策略中主電源采用Vf控制法,其輸出的電壓是恒定的,要增加輸出功率,只能增大輸出電流,負荷的瞬時波動通常首先是由主電源來進行平衡的,因而要求主電源有一定的容量;由于整個系統是通過主電源來協調控制其他電源,一旦主電源出現故障,整個微網就不能繼續運行。主從法依賴于通信,因此通信的可靠性對系統的可靠性有很大影響,而且通信設備會使系統的成本和復雜性增大。
2.4 對微網穩定性的影響
微網與配電網的不同故障點和電動機負荷的大小等因素會對微網的穩定性造成影響[5]。
a. 當配電網故障發生時,主控制單元的控制方法和響應時間對微網穩定性有重要影響;與大電網連接點的三相短路故障是影響微網穩定的最嚴重故障,故障清除時間越短,微網越穩定。
b. PQ控制方式和恒阻抗負荷對微網穩定性沒有影響,通過低壓切電動機負荷和采用可以提高微網的穩定性。
3 主從控制策略仿真分析
以圖1為微網系統結構框架,采用基于下垂特性的電壓頻率控制方式,在PSCAD/EMTDC中搭建仿真模型,對運行模式轉換時的微網穩定性進行仿真分析。
3.1 單主控制
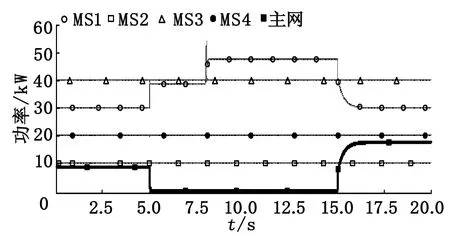
前5 s微網并網運行,4個微源全部為恒PQ控制策略,功率曲線如圖5所示,4個微源有功功率分別為52.5 kW、10 kW、40 kW、20 kW,MS1無功功率為25 kVar,主網向微網輸送功率9.8 kW、4 kVar;5 s后微網由于外部故障開始孤網運行,此時MS1作為master轉為Vf控制,補償微網的功率差額9.8 kW、4 kVar,保證微網的電壓和頻率恒定,其他微源仍為恒PQ控制。15 s時主網故障清除,微網恢復并網運行,微源控制方式恢復至孤網前的恒PQ控制。
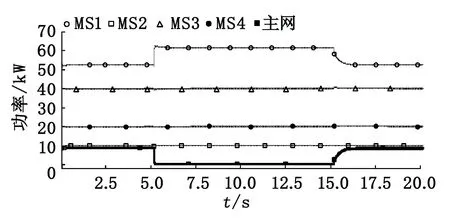
(a) 有功功率
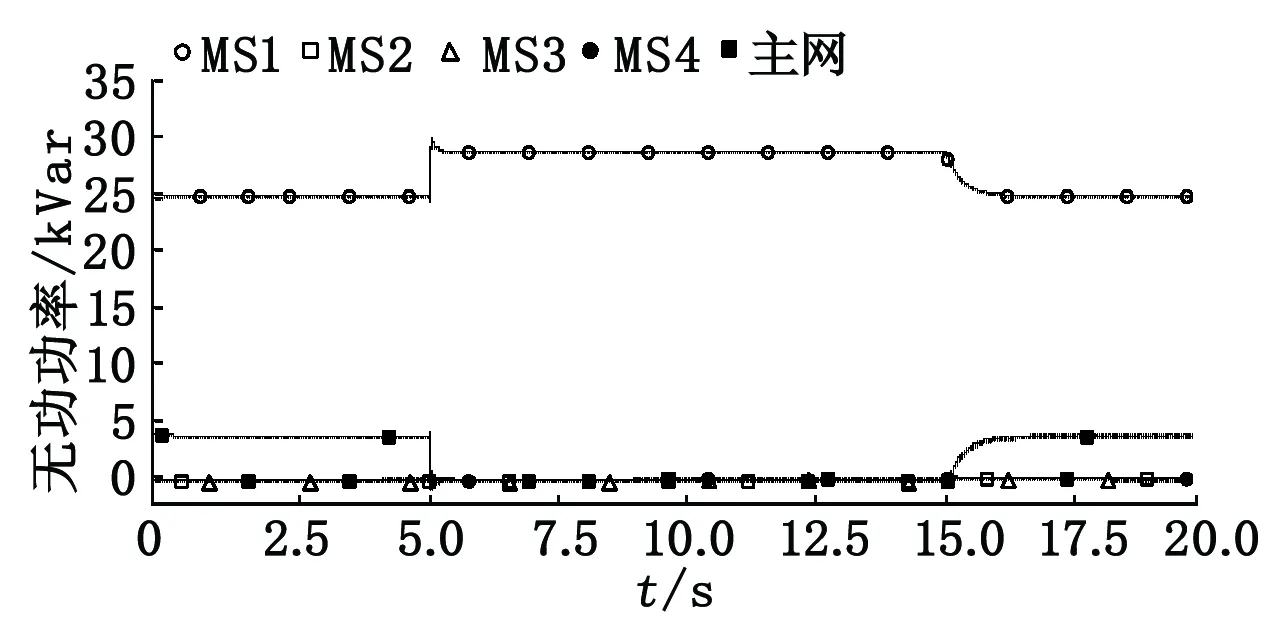
(b) 無功功率
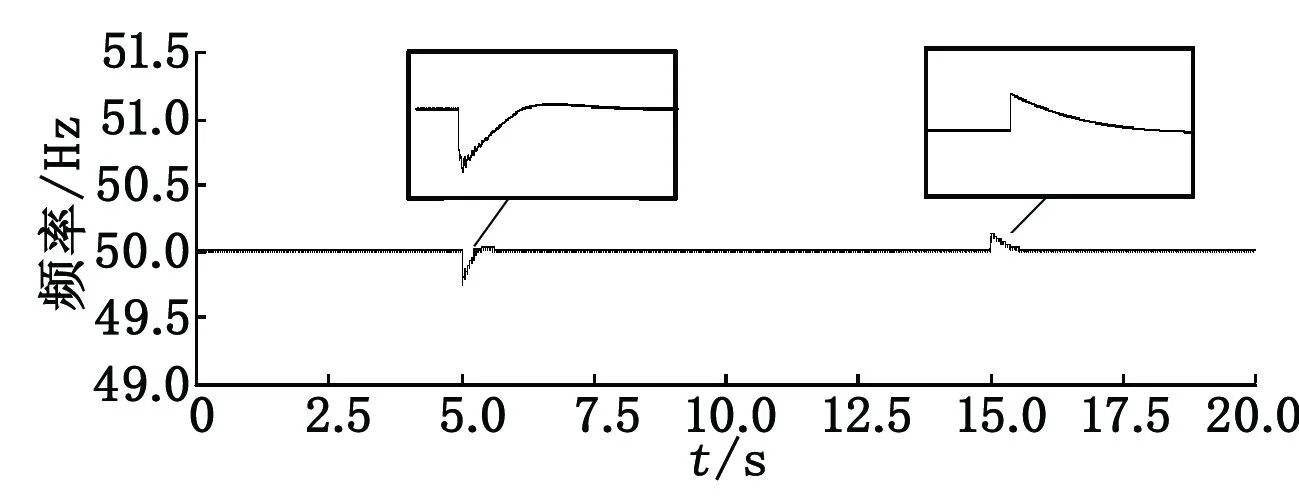
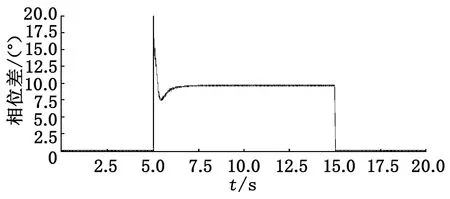
微網電壓、頻率和電壓相位差如圖6所示。由圖6(a)、圖6(b)可見,孤網和再并網瞬間,微網電壓和頻率均有小幅波動,但由于微網孤網運行時未對相位進行精確鎖定,微網再并網時頻率波動較大,電壓波動并不明顯。
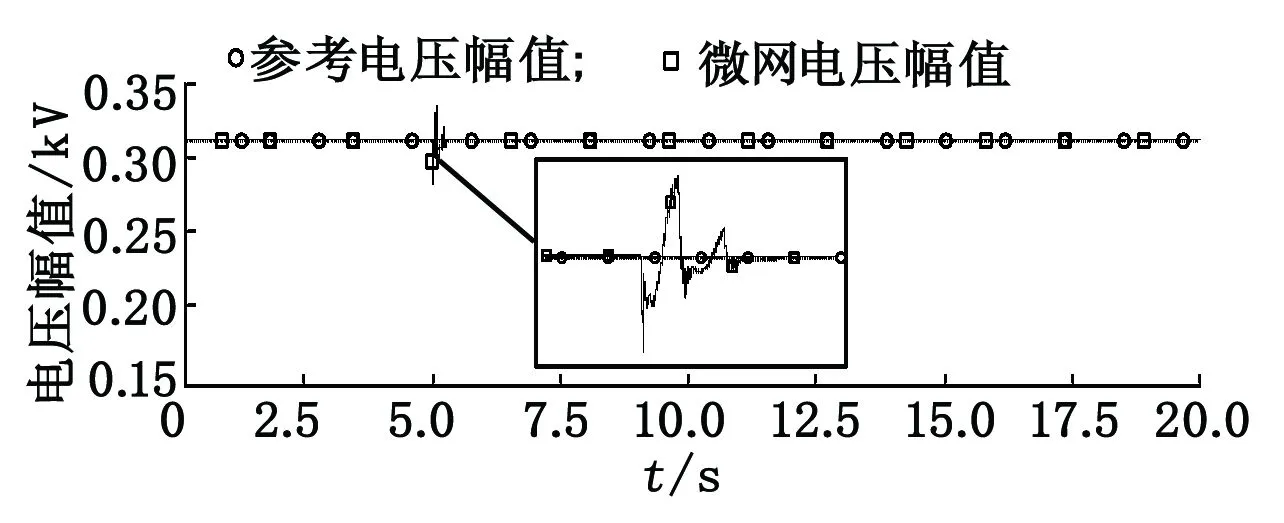
(a) 電壓
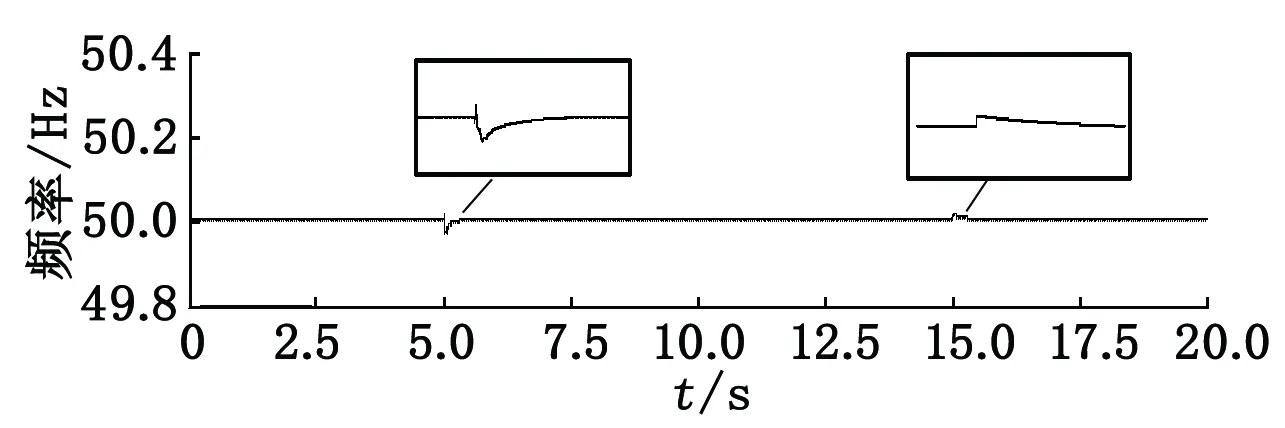
(b) 頻率
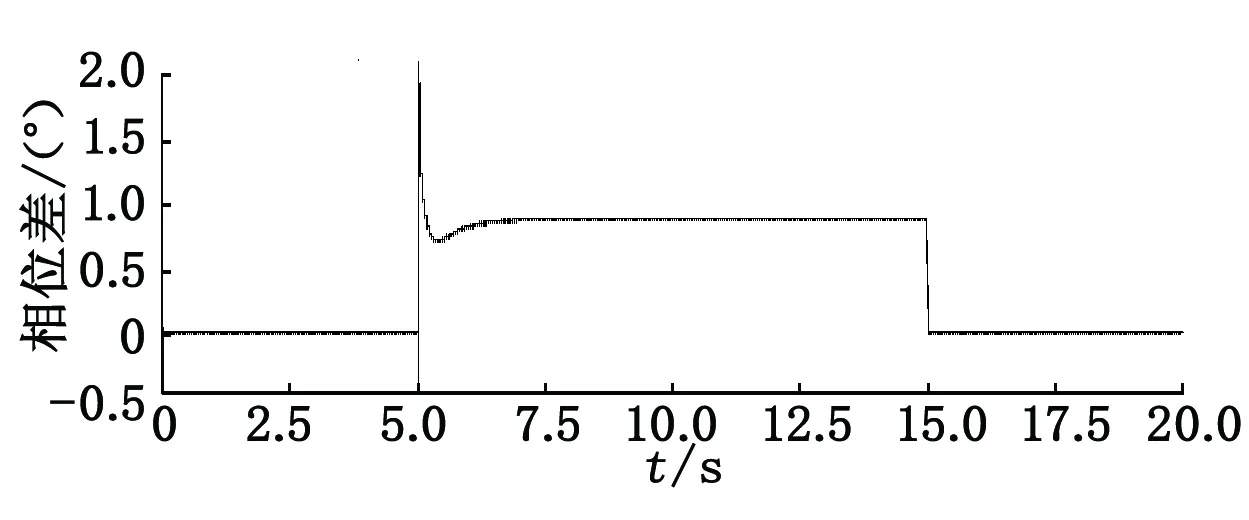
(c) 電壓相位差
微網孤網穩定運行時8 s有功負荷突增9 kW的情況。微網功率、電壓、頻率如圖7所示。可見在MS1的Vf控制方式下,負荷的突增并沒有破壞微網自身穩定性。微網電壓和頻率在短暫波動后均迅速恢復穩定。
(a) 有功功率
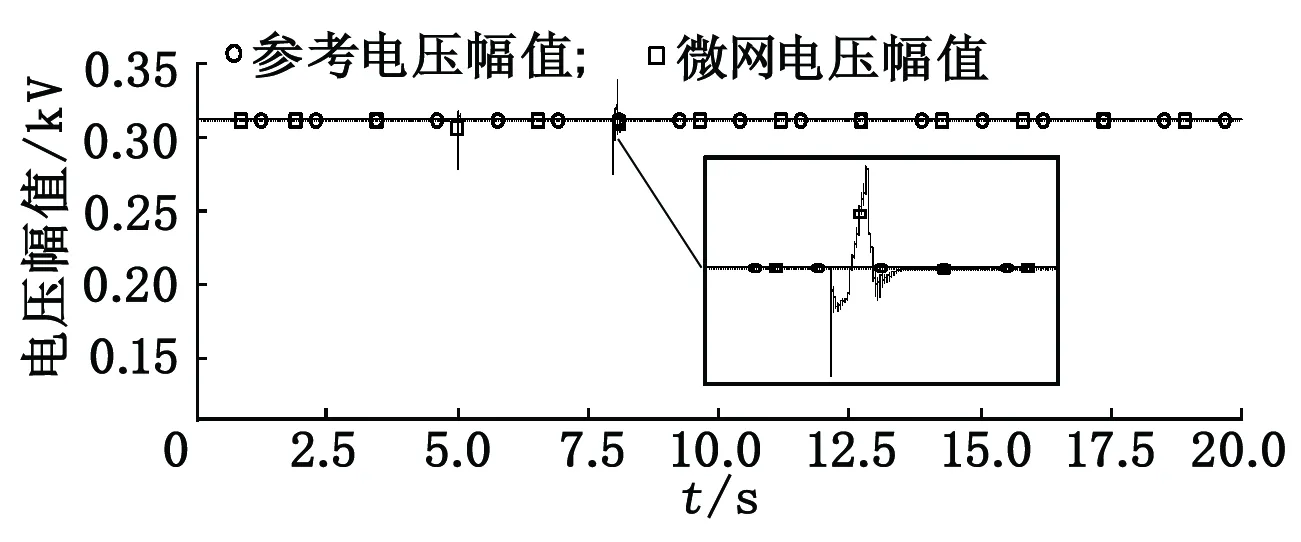
(b) 電壓
(c) 頻率
3.2 多主控制
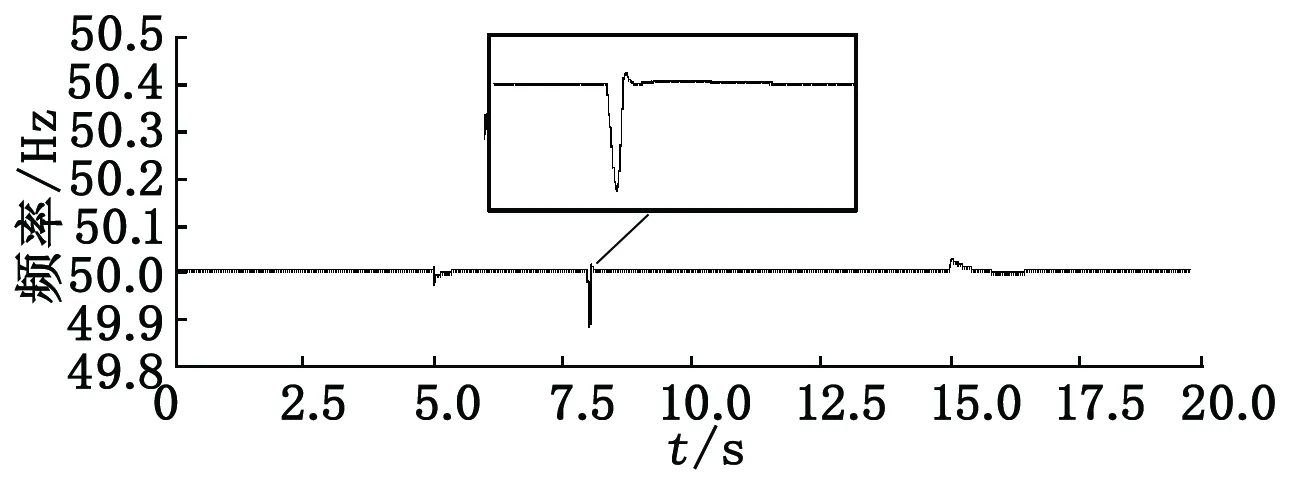
微網并網運行時,4個微源全部為恒PQ控制策略,出力曲線如圖8(a)所示;5 s后微網由于外部故障開始孤網運行,此時MS1和MS2作為master轉為Vf控制,考慮MS2的容量限制,MS2達到最大出力110 kW后轉變為恒PQ控制。兩微源補償微網的功率差額30 kW、14 kVar,保證微網電壓和頻率恒定;其他微源仍為恒PQ控制。15 s時主網故障清除,微網恢復并網運行,微源控制方式恢復至孤網前的恒PQ控制。
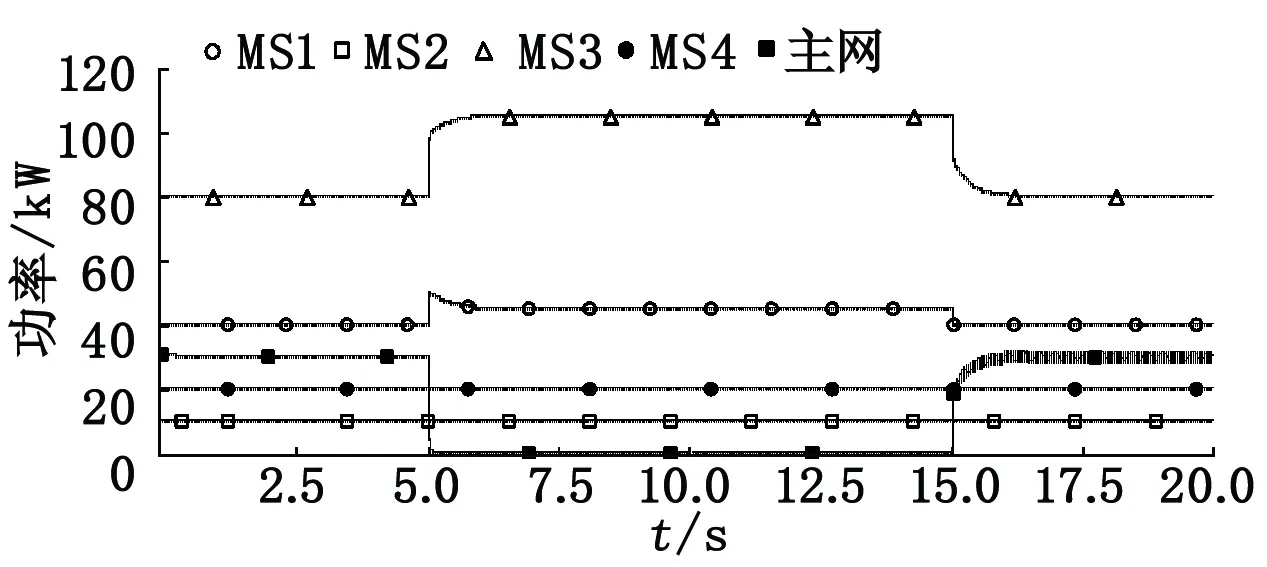
(a) 有功功率
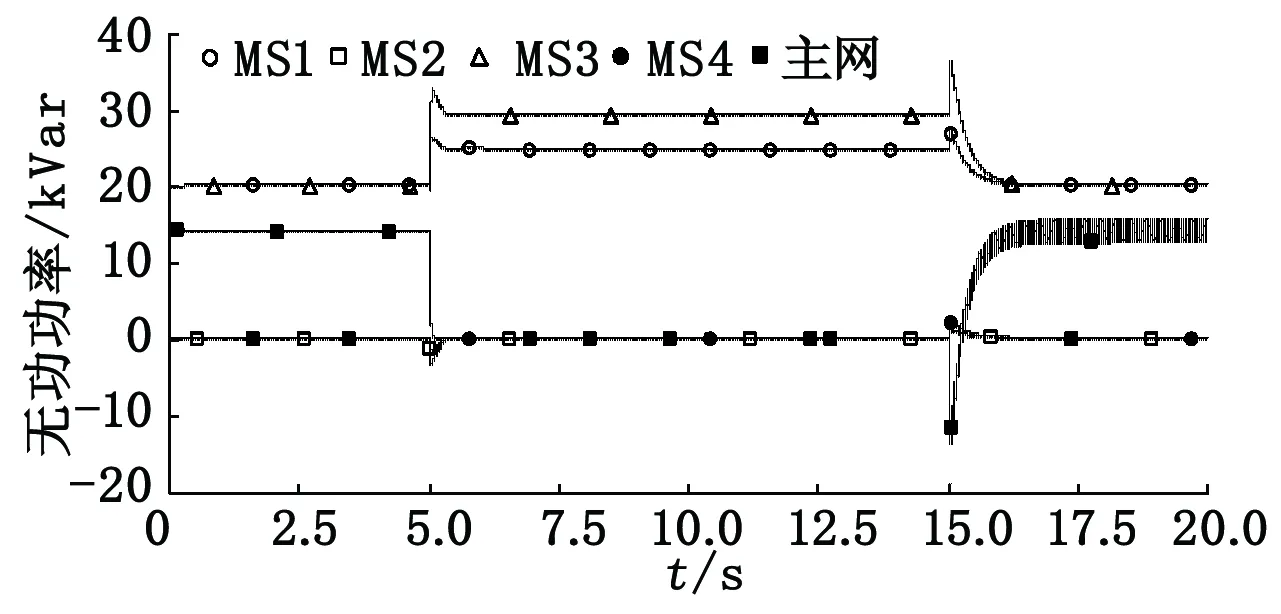
(b) 無功功率
微網電壓、頻率和電壓相位差如圖9所示。由圖9(a)可見,電壓波動較為明顯。圖9(b)、(c)顯示孤網和再并網瞬間,微網頻率比3.1節中波動更大,微網和參考電壓相位差更大,這是由于微源容量的限制,導致其調節能力不足。
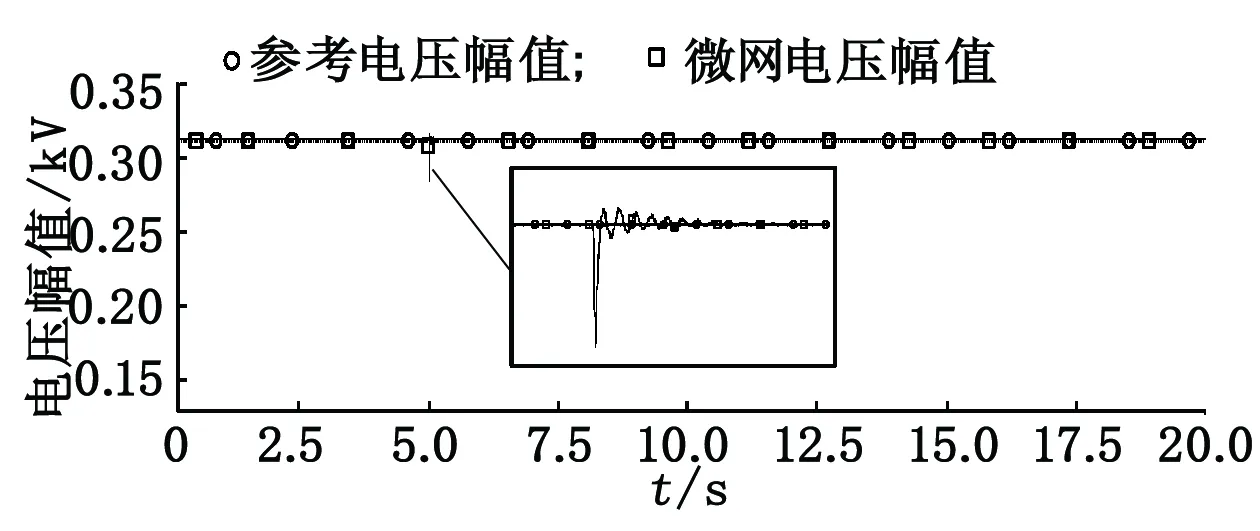
(a) 電壓
(b) 頻率
(c) 電壓相位差
4 結論
針對單主和多主的主從控制策略進行了PSCAD/EMTDC環境下的仿真,仿真結果證明主從控制策略在孤網運行時具有良好的負荷跟隨能力和穩壓恒頻的性能,整個微網系統具有較強的承受負荷沖擊的能力, 基于下垂特性的電壓頻率控制方式可實現微網孤網運行時負荷在微源間的合理分配,且在孤網運行期間可提供有效的電壓和頻率支撐,使電網和微網運行的穩定性良好。單主控制更加簡單易行,但對微源容量有較高的要求。這為進一步研究復雜微網系統的協調控制理論和微網控制理論的實驗室應用奠定了基礎。但上文仿真微源采用的是受控電流源模型,該微網系統的動態模型僅適合于系統級控制策略的動態仿真分析。關于機電協調控制的研究還需搭建更為詳細的原動機模型,微網電壓、頻率的運行標準對微網運行模式的影響也需要進一步的研究。
參考文獻:
[1] 張建華,黃 偉.微網運行控制與保護技術[M].北京:中國電力出版社,2010.
[2] 時珊珊,魯宗相,閔 勇,等.微電源特性分析及其對微網負荷電壓的影響[J].電力系統自動化,2010,34(17):68-71.
[3] 魯宗相,王彩霞,閔 勇,等.微網研究綜述.電力系統自動化[J],2007,31(19):100-107.
[4] 王成山,王守相.分布式發電功能系統若干問題研究[J].電力系統自動化,2008,32(20):1-4.
[5] N.Jayawarna,X.Wu,Y.Zhang,et al.Stability of a Microgrid[C].The 3rd IET International Conference on(PEMD 2006).Dublin,Ireland,2006: 316-320.
[6] 王成山,肖朝霞,王守相.微網綜合控制與分析[J].電力系統自動化,2008,32(7):98-103.
[7] Edwards F.V., Dudgeon G.J.W., McDonald, J.R.,et al.Dynamics of Distribution networks with distributed generation[C].IEEE Power Engineering Society Summer Meeting.Washington,USA,2000,2:1032-1037.
[8] Kariniotakis G.N., Soultanis N.L., Tsouchnikas, et al.Dynamic Modeling of MicroGrids[C],International Conference on Future Power Systems.Amstordam,2005:1-7.
[9] Y.Zhu, K.Tomsovic.Development of Models for Analyzing the Load-following Performance of Microturbines and Fuel Cells[J].Electric Power Systems Research,2002,62(1):1-11.
[10] AlHinai, Karl Schoder, Ali Feliachi.Control of Grid-connected Split-shaft Microturbine Distributed Generator[C].Proceedings of the 35th Southeastern Symposium on SystemTheory.Annapolis,MD,2003:84-88.
[11] Y.Q. Zhan, S.S. Choi, D.M. Vilathgamuwa.Using Quality Control Center to Improve Power System Stability[C].The 4th International Power Electronics and Motion Control Conference.xi'an,China,2004.3:1236-1241.
[12] IEA PVPS.Evaluation of Islanding Detection Methods for Photovoltaic Utilityinteractive Power Systems,Report IEA PVPS T5-09[EB/OL].http://www.iea.org,2006-09-07.
[13] Li Yunwei,Vilathgamuwa D.M.,Chiang P.L.Microgrid Power Quality Enhancement Using a Three-phase Four-wire Grid-interfacing Compensator[J].IEEE Trans on Intustry Applications,2005,41(6):1707-1719.
[14] Baran M.E.,Markaby-El.Fault Analysis on Distribution Feeders with Distributed Generators[J].IEEE Transaction of Power Systems,2005,20(4):1757-1764.
[15] 王志群,朱守真,周雙喜.逆變型分布式電源控制系統的設計[J].電力系統自動化,2004,28(24):61-66.
[16] 張 濤.微型電網并網控制策略和穩定性分析[D].上海:華中科技大學.2008.
[17] 羅建中.分布式微型電網并網研究[D].湖南:湖南大學,2009.
[18] 王成山,楊占剛,王守相,等.微網試驗系統結構特征及控制模式分析[J].電力系統自動化,2010,34(1):99-105.
[19] 肖朝霞.微網控制及運行特性分析[D].天津:天津大學,2009.
[20] 馬 力.CCHP及其所構成微網的運行特性研究[D].天津:天津大學,2008.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36