推掃式航空遙感器像面調焦機構設計
2012-10-30 08:48:46丁亞林惠守文于春風
中國光學 2012年1期
陳 偉 ,丁亞林,惠守文,聶 品,于春風
(1.中國科學院 長春光學精密機械與物理研究所,吉林 長春130033;2.中國科學院 研究生院,北京100039)
1 引 言
航空遙感器是獲取地面信息的重要手段,它以光學成像的方式給人以直觀、清晰的圖像信息,具有實時性好、機動性強等特點。按照成像方式,航空遙感器可以分為畫幅式、全景式和推掃式[1]。
航空遙感器工作時所處的環境( 大氣壓力、溫度等) 及照相距離等條件的不斷變化會導致遙感器光學系統的焦平面位置發生改變。如果CCD 探測器的位置不能隨之改變,就會產生離焦。高性能航空遙感器的自動調焦補償機構,可以校正遙感器變化的像面位置,是保證遙感器成像質量、獲得較高分辨率的重要組件之一。因此,調焦機構的設計與研究具有重要的意義。
本文基于一種推掃式CCD 航空遙感器的研制,討論了遙感器產生離焦的原因,設計出一種內、外曲線凸輪調焦機構,帶動CCD 探測器沿光軸方向運動,使CCD 探測器接收面與光學系統的焦平面重合。對傳動機構的誤差分析和實驗驗證表明,遙感器照相時CCD 探測器的位置能保持穩定,從而保證航空遙感器獲得高清晰度的圖像。
2 離焦原因及調焦方式選擇
遙感器離焦的主要原因是大氣壓力和溫度的變化以及照相距離的變化。大氣壓力和溫度的變化使空氣的折射率發生變化,由此光學系統中透鏡的折射率、曲率半徑、厚度、透鏡之間的間隔均發生變化而導致光學系統后截距發生變化; 遙感器推掃成像時,載機的飛行高度發生變化,物距和像距隨之不斷變化亦會導致CCD 探測器接收面偏離光學系統焦平面。
航空遙感器工作時,允許的離焦誤差不超過遙感器的半倍焦深,計算公式如下:

式中:δ 為半倍焦深,Δ 為焦深,λ 為工作波長,F為鏡頭相對孔徑倒數。
根據式(1) 可計算得到本遙感器的半倍焦深為0.04 mm。
航空航天遙感器光學成像系統的調焦方式有3 種:反射鏡調焦、鏡組調焦、像面調焦[2-3]。反射鏡調焦方式是在鏡頭后截距內增加一塊反射鏡改變光路方向,通過移動反射鏡改變焦面位置,常用于鏡頭后截距較長的長焦距相機。鏡組調焦方式是通過移動光學鏡頭的透鏡組來達到調焦目的。像面調焦方式是通過移動成像介質( 膠片或CCD) 的感光面完成調焦。中科院長春光機所研制的航天遙感器采用了反射鏡調焦方式; 美國CA-295 雙波段畫幅相機采用了鏡組調焦方式[4-6],見圖1。
調焦方式的選擇受到相機整機結構形式和使用環境條件的限制。CA-295 推掃式相機光學系統為雙高斯型折射式系統,配置有3 種不同焦距的鏡頭。如果選擇反射鏡調焦方式,會增加反射鏡及相應的支撐結構;如果選擇透鏡組調焦方式,則每種鏡頭都需要有調焦機構。因此,該遙感器選擇像面調焦方式[4-6]。

圖1 CA-295 相機組成結構圖Fig.1 Schematic diagram of CA-295 camera
3 調焦機構工作原理
裝調遙感器時,在常溫、常壓下使用平行光管標定像平面,模擬物體位于無窮遠處。遙感器工作時,其內部安裝的溫度、壓力傳感器將環境條件的變化轉換為數字量傳遞給遙感器控制器,同時飛機的慣導系統向遙感器輸入飛行高度數據,由此得到照相距離。遙感器控制器根據得到的溫度、壓力、照相距離決定調焦量的大小,通過電控系統驅動調焦電機工作。使用蝸輪蝸桿減速器及凸輪機構將旋轉運動轉化為焦平面組件( 包括CCD 探測器) 沿光軸方向的移動,實現離焦補償。同時,凸輪與編碼器相連接,反饋凸輪轉動的角度信息,保證調焦的位置精度。
調焦機構主要由蝸輪蝸桿組件、凸輪組件、滾子組件、焦平面組件、直線導軌及編碼器等組成,原理如圖2 所示。

圖2 調焦機構原理圖Fig.2 Working principle diagram of focusing structure
蝸輪蝸桿傳動用于傳遞空間交錯軸間的動力和運動,主要優點是可以獲得較大的單級傳動比。凸輪組件是實現調焦電機旋轉運動轉化為焦平面組件沿光軸方向平穩運動的重要機構,是決定調焦量大小的執行機構。CCD 探測器安裝在焦平面組件內,實現與滾子組件的連接。直線導軌通過焦平面組件內的直線軸承保證焦平面組件沿著光軸方向移動,直線導軌與直線軸承之間為間隙配合。
調焦機構不但要求運動準確性,還要求位置穩定性。常用的偏心凸輪形式有內嚙合、外嚙合等,形式如圖3 所示。在內嚙合凸輪形式中,滾子r1與凸輪輪廓R1嚙合;在外嚙合凸輪形式中,滾子r2與凸輪輪廓R2嚙合。

圖3 常用的偏心凸輪形式Fig.3 Schematic diagram of common offset cam
考慮凸輪的加工工藝及精度要求,提出了一種容易實現高精度、具有形封閉功能的內、外曲線偏心圓凸輪結構[7]。凸輪的運動規律如圖4 所示,滾子r1與滾子r2同軸安裝;滾子r1與凸輪輪廓R1嚙合,滾子r2與凸輪輪廓R2嚙合。
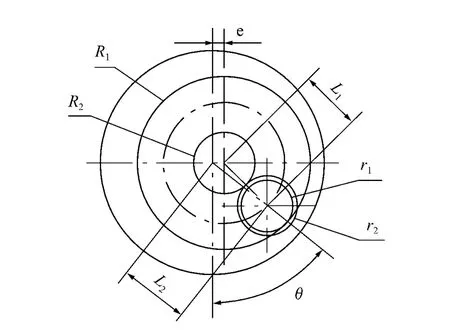
圖4 凸輪運動規律Fig.4 Motion principle diagram of cam
由圖4 可知:
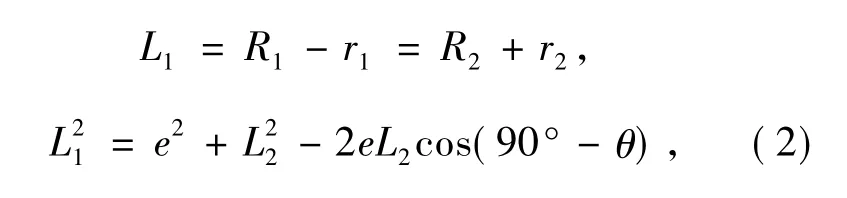
式中:e為凸輪的偏距,L1為滾子中心到凸輪中心的距離,L2為滾子的位移,θ 為滾子的轉角。
研究了大氣壓力、溫度和照相距離對成像的影響。環境條件的變化導致像面最大離焦量為1 mm,在保證調焦機構功能的前提下,盡量增大調焦范圍,而調焦范圍的增大會導致機構的空間尺寸增加。取調焦量為5 mm,L1=13 mm 時,凸輪曲線軸線偏離凸輪軸回轉中心2.5 mm,即偏距e=2.5 mm。
將e和L1的數據帶入式( 2) ,整理得到凸輪的理論廓線如式(3) :

4 調焦機構精度分析
要得到高分辨率的圖像,必須確保CCD 探測器的接收面始終在焦面上。通過分析調焦機構的組成,機構的誤差來自兩個方面: 一個是傳動誤差,另一個是焦平面組件相對直線導軌的晃動。根據式(3) 得到傳動誤差對調焦機構精度影響的計算式(4) :

式中:φ 為傳動誤差引起的焦平面移動量,θ 為凸輪的理論轉角( θ∈[0,2π]) ,β 為傳動誤差引起的凸輪轉角誤差。
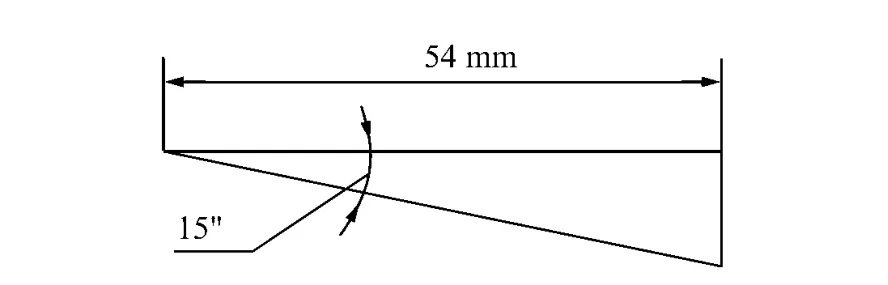
圖5 焦平面組件相對直線導軌的晃動Fig.5 Swing value of focal plane assembly
采用光電自準直方法來測量焦平面組件的晃動。如圖5 所示,遙感器的焦平面長度為54 mm。在實驗室內檢測焦平面組件相對直線導軌的晃動為15″。因此,晃動引起的焦平面位置誤差最大值為:

5 實驗驗證
為檢驗調焦機構精度是否滿足要求,在遙感器裝調完成后對其進行了測試。
將調焦機構水平放置,電感儀的測頭與焦平面組件接觸。實驗時首先控制調焦電機轉動一個角度,以消除啟動空回,向調焦電機發出200 個脈沖,此時凸輪順時針轉動,帶動焦平面組件向上運動;然后控制調焦電機反轉,同樣向調焦電機發出200 個脈沖,此時凸輪逆時針轉動,帶動焦平面組件向下運動。焦平面組件向上和向下運動的位移差值,即為調焦機構引起的誤差[8]。
多次測量焦平面組件的位移,獲得多組數據,各組間數據變化不大,列舉其中6 組如表1 所示。計算得到位移差值的平均值為0.007 5 mm,小于遙感器的半焦深0.04 mm,滿足使用要求。

表1 焦平面組件位移Tab.1 Displacement of the focal plane
6 結 論
調焦機構是保證高性能航空遙感器獲得較高分辨率的重要組件之一,可對遙感器工作時由于環境條件改變引起的離焦進行補償。根據光學系統成像的要求,本文在分析離焦原因及對比多種調焦方式的基礎上,根據推掃式航空遙感器光學系統的特點和結構形式,設計了一種使用凸輪和直線導軌的調焦機構。設計中采用了偏心的內、外曲線凸輪,將凸輪的旋轉運動轉化成CCD 探測器的直線運動,實現通過調整像面位置解決離焦的問題,保證了CCD 探測器的位置穩定性。
通過對該調焦機構的傳動誤差分析和實驗驗證,表明該調焦機構的誤差不大于遙感器的半焦深0.04 mm,滿足使用要求。該像面調焦方法可應用于裝機空間小、焦距較短的遙感器。
[1] 丁亞林,田海英,王家騏.空間遙感相機調焦機構設計[J].光學 精密工程,2001,9(1) :36-37.DING Y L,TIAN H Y,WANG J Q. Design on the focusing mechanism of space remote-sensing camera[J].Opt. Precision Eng.,2001,9(1) :36-37.( in Chinese)
[2] 安源,齊迎春.空間相機直線調焦機構的設計[J].光學 精密工程,2009,17(3) :609-614.AN Y,QI Y CH. Design of straight-line focusing mechanism for space camera[J].Opt. Precision Eng.,2009,17(3) :609-614.( in Chinese)
[3] 王智,張立平,李朝暉,等.傳輸型立體測繪相機的調焦機構設計[J].光學 精密工程,2009,17(5) :1051-1056.WANG ZH,ZHANG L P,LI ZH H,et al.. Design of focusing mechanism of space tridimensional mapping camera[J].Opt. Precision Eng.,2009,17(5) :1051-1056.( in Chinese)
[4] PARTYNSHI A J,BERAN S R,BAKER A M,et al.. Dual band framing reconnaissance camera:US,6694094[P],2004-05-05.
[5] ABDULLAH S J,RATNAM M M,SAMAD Z. Error-based autofocus system using image feedback in a liquid-filled diaphragm lens[J].Opt. Eng.,2009,48(12) :123602.
[6] LIEBE C C,POLLOCK R,HANNAH B. System for establishing best focus for the orbiting carbon observatory instrument[J].Opt. Eng.,2009,48(7) :073605.
[7] 秦榮榮.機械原理[M].長春:吉林科學技術出版社,2000.QIN R R.Theory of Machines and Mechanisms[M]. Changchun:Jilin Science and Technology Press,2000.( in Chinese)
[8] 王書新,李景林,劉磊,等.大尺寸焦平面空間相機調焦機構的精度分析[J]. 光學 精密工程,2010,18( 10) :2239-2243.WANG SH X,LI J L,LIU L,et al.. Accuracy analysis of focusing mechanism in space camera with long-focal-plane[J].Opt. Precision Eng.,2010,18(10) :2239-2243.( in Chinese)