基于nRF24E01的衛星三軸半物理仿真系統研究
2012-10-25 12:38:26王井胤林寶軍
中國測試 2012年6期
王井胤 , 林寶軍
(1.中國科學院光電研究院,北京 100094;2.中國科學院研究生院,北京 100190)
0 引 言
微小衛星半物理仿真系統對縮短姿態控制系統驗證周期、提高所研制系統的可靠性具有十分重要的工程實踐意義[1]。但是組建整套的全物理姿控仿真系統需要巨額資金和較長的研制周期,且仿真效果并不十分突出,與微小衛星“快、好、省”的研制要求背道而馳;僅進行單軸氣浮臺半物理仿真又在仿真的物理實物全面性方面有所欠缺,無法仿真到三軸敏感器和執行器聯動執行姿態控制任務的實際運行情況。因此,研究適合于微小型衛星的三軸半物理仿真系統具有重要的工程實踐意義。本文利用Matlab XPC實時仿真技術、nRF24E01無線RS232串口通信、多臺單軸氣浮臺聯動運行和星載計算機、反作用飛輪、光纖陀螺等物理實物,設計了基于無線串口通信的微小衛星姿態控制系統的半物理仿真總體方案,并詳細討論了衛星姿態三軸耦合特性、無線信號傳輸準確性、仿真系統物理特性測試等問題。最后利用該系統對衛星偏置動量三軸穩態控制模式算例進行了仿真驗證。
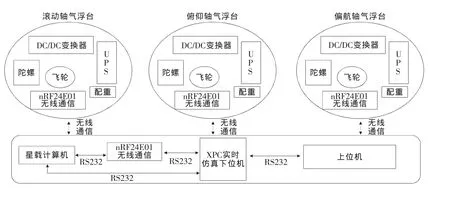
圖1 姿控系統三軸半物理仿真系統結構圖
1 微小衛星三軸半物理仿真系統設計
在衛星研制過程中,衛星姿態控制系統半物理仿真是在數學仿真驗證的基礎上,將系統中的關鍵單機如星載計算機、光纖陀螺和反作用飛輪等用實物代替,其他模塊用Matlab Simulink仿真軟件建立數學模型,并將上述數學模型下載到XPC下位機進行實時仿真進而構成半物理仿真回路驗證姿態控制算法有效性以及關鍵單機的工作性能。半物理仿真系統是衛星工程實踐前的最重要的姿態控制系統設計驗證手段,對整星的研制就有重要意義。
1.1 姿控系統三軸半物理仿真系統結構
根據姿控系統半物理仿真系統設計要求,設計半物理仿真系統體系結構圖,如圖1所示。半物理仿真系統由軟件和硬件兩部分組成,硬件包括nRF24E01無線RS232通信模塊、XPC實時仿真下位機、單軸氣浮臺、反作用飛輪、光纖陀螺、星載計算機、電源模塊以及與XPC實時仿真下位機連接的上位機等;軟件包括XPC下位機控制軟件、開發編譯環境Matlab/Simulink/RTW等。以下重點介紹星載計算機和XPC下位機的結構。
1.1.1 星載計算機
星載計算機結構如圖2所示,是衛星星務管理的核心元件,負責對衛星自主運行的管理、姿態確定與控制、指令分析、數據采集、發送各種遙測遙控直接與間接命令等,其中包括EEPROM、PROM、RAM、各種輸入輸出、定時器及看門狗等[2]。在衛星姿態確定與控制系統中,衛星星載計算機直接控制主要的敏感部件和執行部件。因此,星載計算機是衛星的控制核心部件,需要對部分故障模式等進行演示驗證并對星載計算機性能指標進行半物理仿真考核驗證。
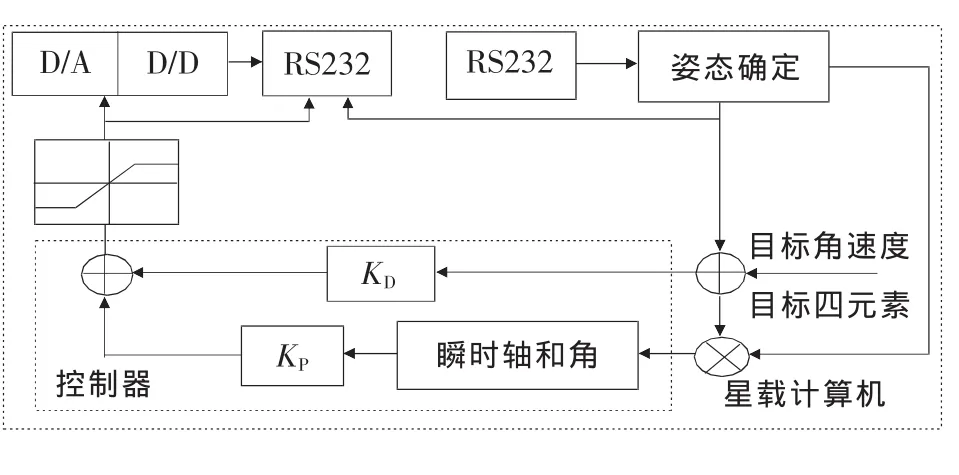
圖2 星載計算機結構圖
1.1.2 Matlab XPC實時仿真技術
Matlab XPC實時仿真技術主要包括硬件系統和軟件環境。其中硬件系統采用的是研華610工控機并被調為U盤Dos啟動,主要任務就是進行衛星動力學方程、運動學方程以及各種仿真數學模型的高速計算,硬件實物包括處理器和I/O接口等的工控機;軟件環境可以方便地實現代碼生成/下載和試驗/調試等工作,由Matlab XPC實現。XPC具有強大的功能,可以很好地完成控制算法的實時設計、測試與實現,Matlab XPC實時仿真的主要流程是系統建模、數學仿真、下位機程序下載及離線實時仿真等。
1.2 基于nRF24E01的無線串口RS232設計
nRF射頻技術是一種比較實用的工作在2.4GHz ISM頻段的短距離無線通信標準。nRF技術具有硬件設計開發周期短、開發成本低以及通信距離遠等特點[2]。本文所設計的衛星三軸氣浮臺半物理仿真系統各軸同時采用nRF24E01無線通信模塊完成通信,因此各軸間信號的抗干擾性成為系統仿真準確性的關鍵因素。該射頻模塊能夠完成RF數據包處理,包括加前綴和CRC校驗等手段,同時ShockBurst傳輸模式能夠完成不同頻率數據的同時接受工作,這些模塊特性都使系統具有了很強的抗干擾性[3]。
本文無線通信系統包括RS232串口通信和無線數據通信兩部分,如圖3所示。終端通過RS232串口與nRF24E01射頻收發集成芯片通信,RS232是通行的標準接口,從而本文所設計的基于nRF24E01的無線串口RS232成為陀螺和飛輪等臺上設備與星載計算機短距離通訊的理想選擇,由于RS232協議采用的電平是±12V,因此在TTL電平的數字信號進入COM口前應進行電平的轉換。

圖3 基于nRF24E01的RS232通信模塊結構
1.3 衛星耦合特性相關設計
本文所設計的衛星三軸半物理仿真系統由3臺單軸氣浮臺聯合工作實現,每臺氣浮臺只能仿真一個通道[4],考慮到所采用的偏置動量三軸穩態控制對于各軸的動量耦合具有很高要求,因此需要在XPC實時仿真下位機的動力學模型中考慮三軸的耦合效應[5]。光纖陀螺測量得到星體各軸的角速度,該信號經無線串行通信送給星載計算機,星載計算機再通過RS232串口將該信號送給XPC下位機,在下位機的衛星動力學模型中將各軸角速度測量信號進行耦合運算,計算后的姿態角和姿態角速度偏差被送還給星載計算機,由相應的姿態控制器得到各軸反作用飛輪的控制信號,并通過無線RS232模塊加載到反作用飛輪。反作用飛輪的轉速信息同樣通過無線通信模塊送還給星載計算機,從而實現針對飛輪的閉環控制半物理仿真。
2 三軸半物理仿真系統驗證
姿態控制系統偏置動量三軸穩態控制是微小衛星重點控制模式之一,本文結合已有算例,針對該控制模式進行三軸半物理仿真驗證,可以驗證該控制算法下姿態控制系統的物理實物執行情況,為姿控系統的方案設計提供依據。同時,對敏感器和執行機構等硬件機械接口及電接口等進行驗證。通過Matlab/Simulink建立的衛星偏置動量三軸穩態控制算法數學仿真模型,并結合衛星運動學模型和動力學模型、干擾力矩模型(包括太陽光壓干擾、大氣干擾、天體干擾及地磁干擾等)、太陽翼撓性和燃料貯箱液晃干擾模型、光纖陀螺模型和反作用飛輪模型等組成衛星姿態控制系統半物理仿真的主體程序,通過Matlab XPC下載生成可以在下位工控機上運行的文件進行實時仿真[6]。
2.1 偏置動量三軸穩態控制器設計
針對基于反作用飛輪控制的微小衛星偏置動量三軸穩態控制任務,在3-1-2旋轉順序下,衛星的運動學方程為
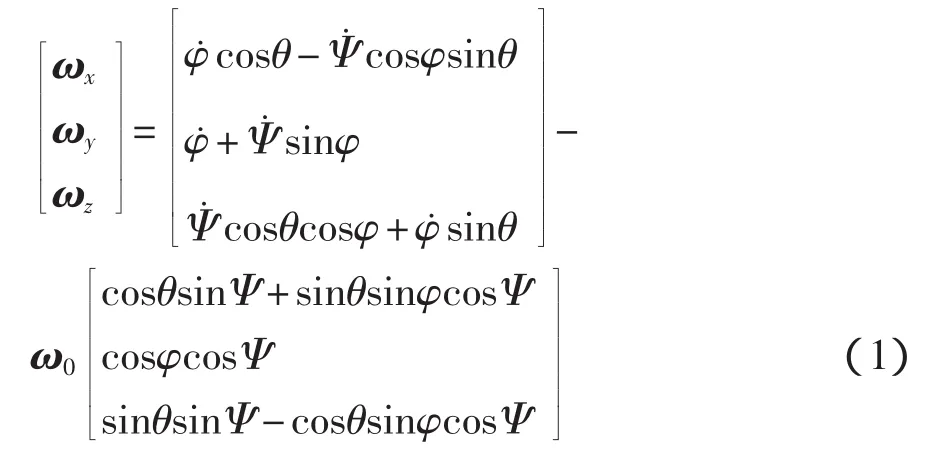
式中:φ,θ,Ψ——滾動、俯仰和偏航姿態角;
ωx,ωy,ωz——衛星本體系相對慣性系的角速度;
ω0——地心慣性系下的軌道角速度。
衛星姿態動力學方程為

式中:Ⅰ——星體轉動慣量矩陣;
ω——本體坐標系中衛星相對慣性坐標系的角速度矢量;
T——飛輪外的控制力矩和飛輪磁卸載力矩以及各種干擾力矩的總和;
h——飛輪相對衛星角動量,h=[hxhyhz]是其在本體系的分量,且hy遠大于hx和hz。
結合式(1)和式(2)則有
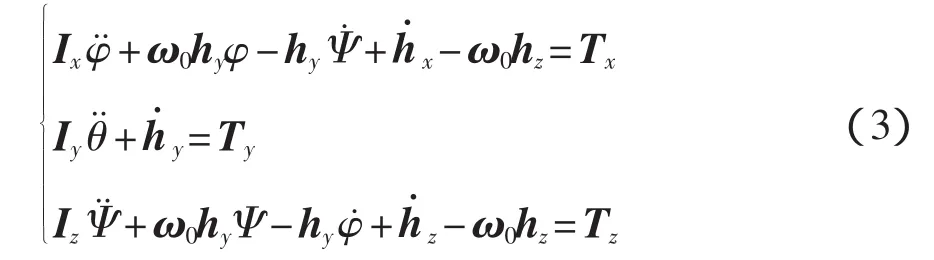
其中,hy變換很小,可認為近似定值,則可知衛星滾動/偏航回路和俯仰回路可以解耦控制。
由式(3)可得到俯仰回路PD控制器[7]為

是一個典型的二階控制系統,可由控制理論設計得到相應的控制參數。由式(3)可得到滾動/偏航耦合回路方程和二維觀測器為

2.2 nRF24E01模擬RS232通信效果驗證
作為微小衛星姿態控制三軸半物理仿真系統的關鍵部件,nRF24E01無線通信模塊模擬了衛星的RS232串口通信,是半物理仿真中信息傳遞的重要通道,其通信效果直接影響半物理仿真結果的有效性和可靠性[8];因此,在本文中設計了關于無線通信模塊的驗證環節,由相同的RS232信號源分別并行經過有線RS232和nRF24E01無線通信模塊后在示波器中比較其輸出結果,如圖4所示。
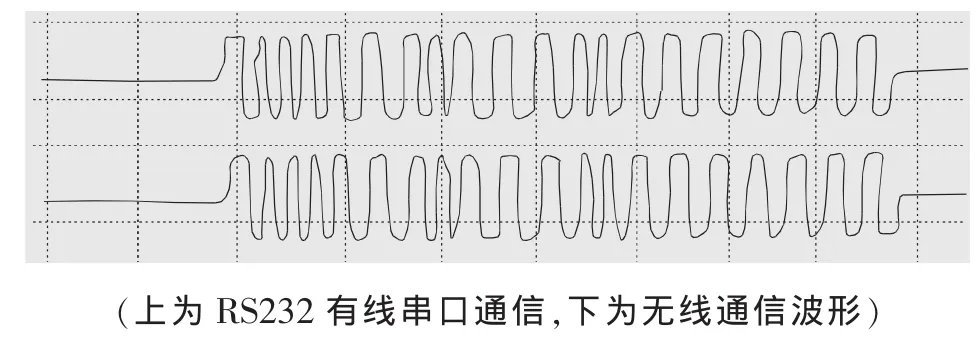
圖4 nRF24E01與RS232通信效果比較
從圖4中可以看出,經過無線通信模塊后的波形由于存在電平轉換和速率轉換等環節,在同步性和波形形態細節方面和有線輸出略有不同,但是二者匹配度很高,不會影響到仿真結果的正確性。
2.3 仿真結果
根據文獻[3]介紹的測量單軸氣浮臺轉動慣量方法得到系統的轉動慣量矩陣為
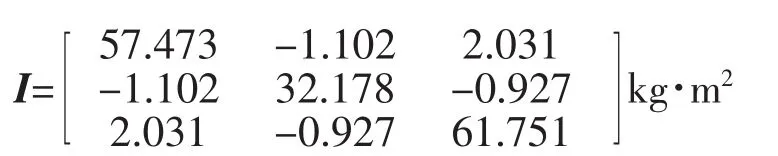
轉動慣量 0.00342kg·m2,最大角動量 1N·m·s,最大輸出力矩 0.05N·m;初始角度偏差[0.03 0.03 0.02]°,初始四元數[0.981 2 0.080 9 0.071 2 0.160 3],初始飛輪角動量[-0.2-120-0.4]N·m·s;目標角度偏差[0.0 0.0 0.0]°,目標四元數[1.0 0.0 0.0 0.0],仿真結果如圖5所示。
從圖5中可以看到半物理仿真平臺工作效果良好,能夠實現衛星偏置動量三軸穩態控制算例的仿真過程,可以得到較為真實的姿態和反作用飛輪運行情況,對于算例具有較好的驗證效果,同時也驗證了半物理仿真系統方案設計合理、可靠。
3 結束語
本文設計了基于nRF24E01無線通信模塊的微小衛星姿態控制系統三軸半物理仿真平臺。應用無線通信模塊實現了RS232通信協議的無線化工作,注重無線通信的抗干擾問題,驗證了模擬RS232串口通信的有效性和準確性,實現了多臺單軸氣浮臺的聯合工作,從而構造出了能夠支持衛星三軸敏感器、執行器和星載計算機等關鍵單機的物理實物協調工作的半物理仿真平臺,提高了衛星半物理仿真系統實物接入的全面性,對于衛星姿態控制系統的設計工作具有很好的支撐作用,仿真結果表明所設計的半物理仿真系統工作效果較為理想。
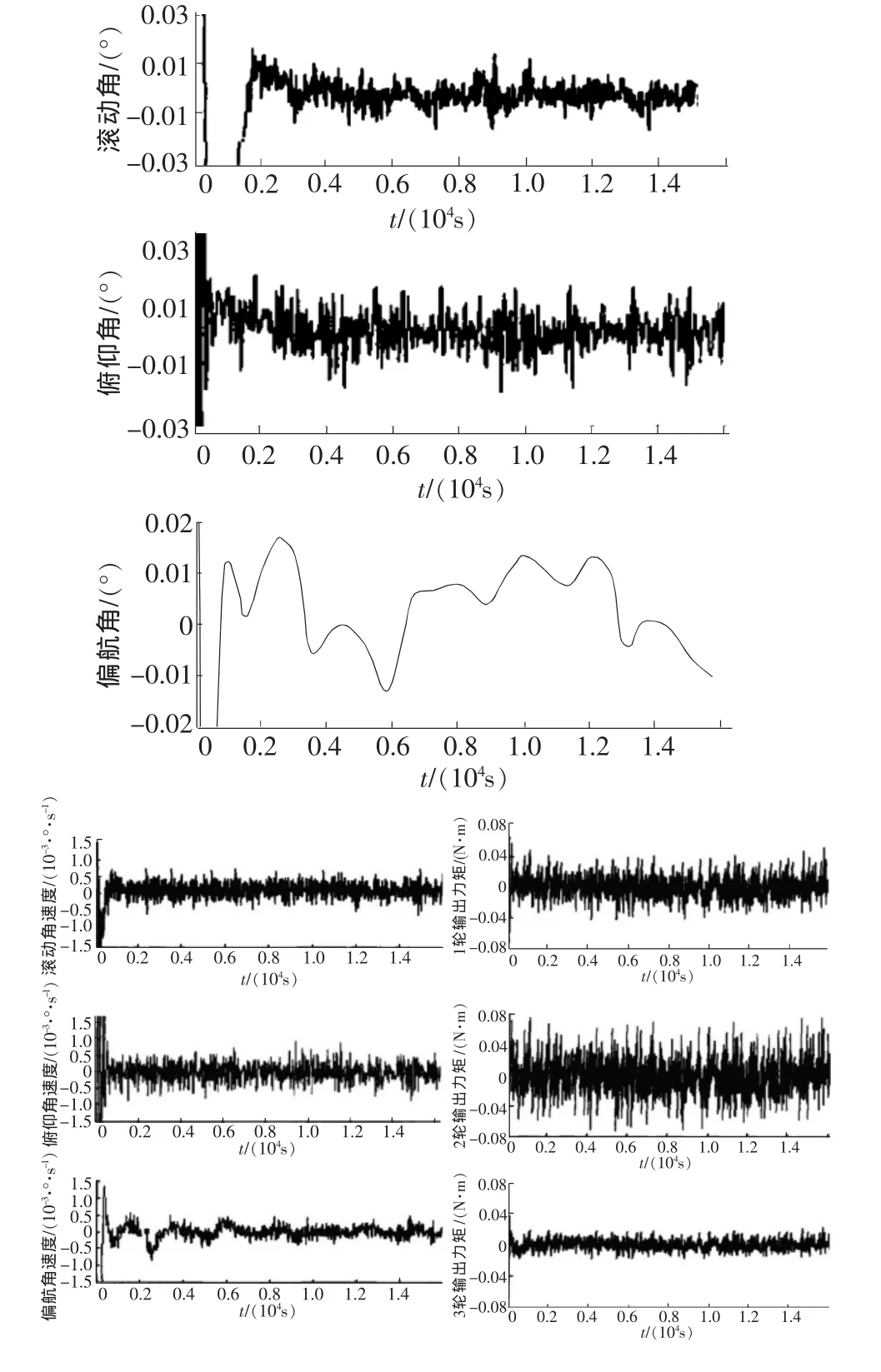
圖5 半物理仿真結果
[1]王引衛.RS-232串口無線通信與旋轉刺激臺控制系統設計[D].西安:西北工業大學,2005.
[2]潘小龍,張建濱,孟俊杰,等.基于nRF905的無線溫度采集系統設計與實現[J]. 電子設計工程,2011,19(12):75-78.
[3]符初生,龐曉鳳,文紅,等.一種虛擬中繼的無線數傳系統設計[J].電子科技大學學報,2006,36(6):901-904.
[4]劉良棟.衛星控制系統仿真技術[M].北京:宇航出版社,2003:42-96.
[5]田留德,趙建科,薛勛,等.基于單軸氣浮臺的角動量輸出測量方法[J].中國測試,2011,37(6):41-44.
[6]楊滌,李立濤,楊旭,等.系統實時仿真開發環境與應用[M].北京:清華大學出版社,2002:25-88.
[7]莊浩,蘇燕辰,傅莉萍,等.基于無線技術的液壓油泵測試裝置設計[J].中國測試,2011,37(4):45-48.
[8]廖暉,周鳳岐,周軍,等.三軸輪控小衛星大角度機動變結構控制研究[J].航天控制,1999,17(4):11-15.
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
消費導刊(2017年20期)2018-01-03 06:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
