時柵式直驅轉臺位置反饋智能接口設計**1
2012-10-23 07:51:52馮濟琴鄭方燕奚建平
制造技術與機床 2012年9期
馮濟琴 張 健 鄭方燕 奚建平
(重慶理工大學機械檢測技術與裝備教育部工程研究中心,重慶 400054)
直驅轉臺把控制對象同電動機做成一體化結構,將負載與電動機的轉子直接相連,取消了電動機到轉臺之間的一切中間環節,把機械傳動鏈長度縮短為零,完全用“電”來代替原來的機械傳動環節,具有定位準確、動態響應速度及加速度高等特點[1]。時柵是一種“以時間測量空間”的新型位移傳感器,它可以不用常規的機械刻線而實現角位移的準確測量,使制造成本大大降低[2]。因此,采用筆者所在實驗室研究開發的時柵傳感器作為轉臺位置檢測元件代替光柵進行位置反饋,在精度、可靠性和成本等方面具有顯著優勢。為了消除時柵式直驅轉臺動態位置反饋誤差,本文利用預測測量方法,研究時柵式直驅轉臺位置反饋與控制智能接口電路,將時柵絕對式離散角度測量值轉化為增量式連續脈沖信號。
1 時柵與轉臺接口分析
1.1 轉臺動態位置反饋誤差
時柵按時間均分采樣,測量空間位置。CNC系統在進行全閉環位置伺服控制時,要求按空間均分進行位置反饋。因此,在全閉環位置反饋過程中時-空不同步。時柵測量周期T由V的大小決定,目前為2.5 ms。但由于V值不可能絕對恒定,測量周期會在2.5 ms左右波動。CNC系統按時間序列采樣實現空間位置控制,采用硬件定時中斷方式獲取位置信息,定時時間一般為4 ms[3]。由于時鐘晶振、定時器、軟件響應中斷和程序運行時間的變化等因素的影響,時柵測量周期和CNC系統采樣周期也會在一定范圍內波動。并且時柵和CNC系統分別采樣各自獨立的時鐘系統,兩套時間也不同步。上述時-空不同步、時-時波動以及時-時不同步等因素會造成系統采樣得到的位置值并非當前轉臺的實際位置,而是某一時間Δti(Δti≤T,大小不確定)以前的數據,會引起動態位置反饋誤差。
1.2 位置預測測量方法
時柵前N個時刻的絕對角度測量值 θi-N+1,θi-N+2,…,θi可視為一個時間序列,因而它是序列動態性和發展變化規律的描述。因此可以建立時間序列模型來對時間序列的未來取值進行預測。
利用時柵前N個時刻的絕對角度測量值θi-N+1,θi-N+2,…,θi,在當前時刻Ti預測出下一個測量周期T(從時刻Ti至Ti+1)內時柵的角位移值Δθi,并在下一個測量周期T內發出代表角位移預測值Δθi的增量式脈沖信號。采用這種預測方法就可以把絕對式離散角度測量值轉化為增量式連續脈沖信號。時柵第k個測量周期(從時刻Tk-1至Tk)內直驅轉臺的角位移為

通過對直驅轉臺現在和過去N個采樣周期T的角位移值 Δθi-N+1,Δθi-N+2,…,Δθi建模,利用時間序列理論[4],得到下一個時柵測量周期(從時刻Ti至Ti+1)內的直驅轉臺角位移預測值

則在下一個時柵測量周期(從時刻Ti至Ti+1)內位置反饋智能控制接口采用脈寬調制PWM(Pulse-Width Modulation)方式發出脈沖的個數為

式中:Q為脈沖當量;ei為上一個周期(從時刻Ti-1至Ti)內的預測誤差。
將實際測量值作為預測值的標準量,在進行當前位置預測時,利用當前實際測量值對數控轉臺上一個周期內的位置動態預測誤差進行修正[5]。從時刻Ti-1至Ti的預測誤差ei的計算式可表示為

結合式(3)和式(4),得到實際采用的用于計算脈沖個數Pi+1的計算公式為

式(5)表明在進行當前預測(從時刻Ti至Ti+1)時,對上一個周期(從時刻Ti-1至Ti)的預測誤差進行了實時修正。因此預測誤差不累積。
2 接口硬件設計
時柵式直驅轉臺位置反饋控制智能接口框圖如圖1所示。智能接口的輸入為時柵測量的絕對角度值,輸出為能與通用數控系統接口的增量式脈沖信號。時柵采用數字信號處理器DSP處理數據得到角度測量值,經現場可編程邏輯器件CycloneII后送到ARM處理器,由ARM處理器完成預測測量算法設計,預測角位移值以增量式脈沖信號輸出。時柵角度測量結果也可通過RS-232接口以數字方式直接輸出。由此,智能接口可以實現空間位置預測測量。
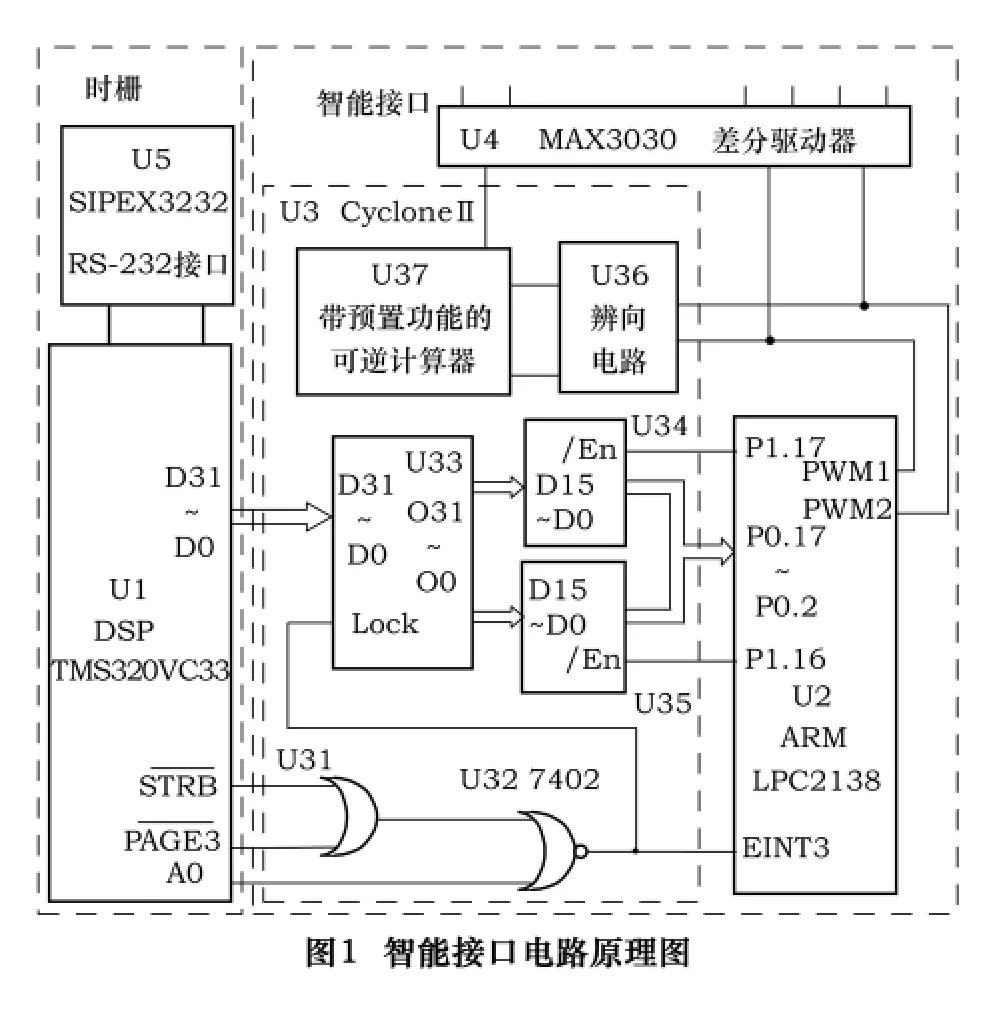
如圖1所示,時柵每隔一個測量周期得到一個實際測量角度值θk,通過U1的D31~D0端輸出,同時采用寫操作指令控制U1的/STRB、/PAGE3和A0端的狀態,產生一個正脈沖,在脈沖的上升沿將U1的D31~D0輸出的角度值鎖存到U33的O31~O0端,通過指令將ARM處理器U2響應中斷的方式設置為脈沖下降沿觸發,在脈沖的下降沿觸發U2中斷。U2利用位操作指令控制P1.16和P1.17端狀態分兩次從兩片16位三態總線緩沖器(U34和U35)讀入32位的θk值,按照預測算法完成相關計算后,得到數控轉臺角位移預測值,并由U2的PWM1和PWM2端以PWM方式輸出代表預測角位移值的脈沖信號,兩個端口輸出的脈沖個數相等,但相位相差90°。若時柵角度值逐步增大,則PWM1端信號相位超前PWM2端信號90°;若時柵角度值逐步增小,則 PWM1端信號相位滯后PWM2端信號90°。U2的PWM1和PWM2端分別接辨向電路U36的兩個輸入端進行辯向,并由具有預置功能的可逆計算器U37對兩個輸入端輸入的脈沖計數,當U37計數的脈沖個數與預置的初始值相等時,U37計數的脈沖個數清零,并同時從R端輸出一個零位脈沖信號。U2的PWM1和PWM2端和U37的R端都接入差分驅動器MAX3030(U4),將單端信號轉換為RS-422差分 TTL信號輸出。將 U31、U32、U33、U34、U35、U36和U37全部集成在一塊可編程邏輯芯片CycloneII(U3)內部。
3 軟件設計

采用3階自回歸模型AR(p)作為預測測量的模型,接口軟件流程圖如圖2所示,首先初使化中斷、PWM控制器等,并置預測系數的初值。由ARM響應外部中斷后采集時柵測量數據,并完成對角位移的預測,然后輸出代表預測值的增量式脈沖。待采集到11個角度數據后,利用最小二乘法算法計算模型系數。在動態預測過程中,需要根據預測均方誤差值調整模型系數。判斷出預測誤差偏大后,采用最新的11個測量數據重新利用最小二乘算法計算模型系數。
4 實驗裝置與結果
圖3為時柵直驅轉臺裝置,為了測試系統的動態誤差,在轉臺下方安裝精度為±1″的HEIDHAIN圓光柵ROD880。在轉臺運動過程中同步采樣光柵值和時柵預測值,把光柵測量值作為直驅轉臺測量的標準量,時柵的預測測量值與之進行比較,從而得到動態預測測量的誤差值。
實驗采用Heidenhain公司的IK220對ROD880圓光柵信號進行處理。IK220是一種基于PCI總線的細分和計數卡[6]。在 Windows XP環境下,通過 WDM(Windows Driver Model)設備驅動程序對IK220進行訪問。計算機采用定時方式讀取光柵測量數據,定時時間間隔設置為3 ms,一旦定時時間到,定時脈沖自動鎖存IK220角度測量數據。
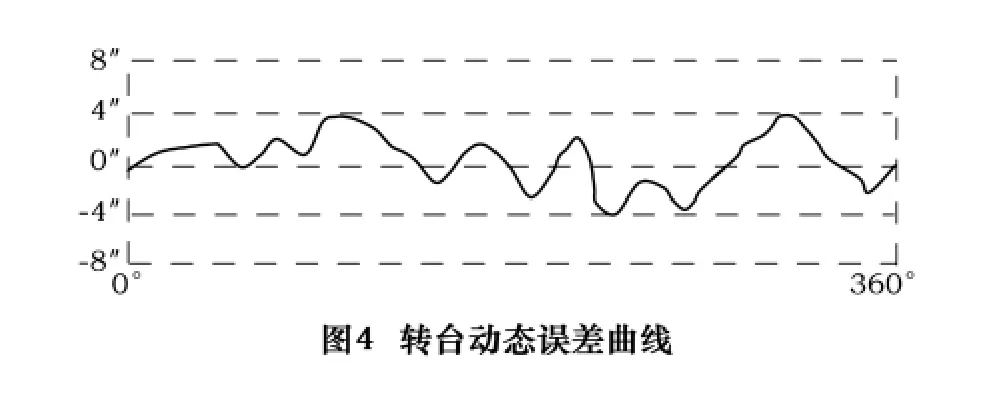
圖4為以光柵測量值為標準量,由軟件自動繪制時柵測量值誤差曲線。由圖可知直驅轉臺動態測量誤差為±4″。
5 結語
時柵和直驅轉臺系統的時-空不同步、時-時波動以及時-時不同步等因素,會引起動態位置反饋誤差。為解決這一關鍵技術問題,提出了利用空間位置預測測量方法解決該問題。研制了基于ARM和CycloneII技術的時柵數控轉臺位置反饋與控制智能接口電路,接口電路輸入為時柵測量的絕對角度值,輸出為能與直驅系統接口的增量式脈沖信號,實現了空間位置的預測測量。開展了動態預測實驗,實驗結果表明,直驅轉臺空間位置的動態預測誤差為±4″,解決了直驅轉臺動態位置反饋誤差問題。
[1]王貴子.機床轉臺直接驅動力矩電動機及其控制器研究[D].沈陽:沈陽工業大學,2007.
[2]Liu Xiaokang,Peng Donglin.Research on a novel high-precision intelligent sensor[J].Solid State Phenomena,Mechatronic Systems and Materials,2006,113(11):435 -441.
[3]白恩遠,王俊元,孫愛國.現代數控機床伺服及檢測系統[M].北京:國防工業出版社,2006.
[4]何書元.應用時間序列分析[M].北京:北京大學出版社,2007.
[5]耿麗榮,周凱.基于時間序列預測技術的數控機床輪廓誤差實時補償方法研究[J].制造技術與機床,2004(6):22-25.
[6]DR.JOHANNES HEIDENHAIN GmbH.IK 220 user's manual[M].Germany:Heidenhain,2006.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
