基于橢球擬合的三軸磁傳感器誤差補償方法*
2012-10-21 03:45:04劉文怡張曉明
傳感技術學報 2012年7期
李 勇,劉文怡,2*,李 杰,張曉明,蔣 竅
(1.中北大學電子測試技術重點實驗室,太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051)
隨著現代科學技術的進步,許多工業領域對載體姿態測量精度的要求越來越高。為了獲得高精度、高可靠性的導航信息,就必須對傳感器進行有效的誤差標定與補償[1]。傳統的傳感器標定補償方法主要有四位置法、八位置法等,存在計算量大、操作復雜、不易實現等不足,尤其是三軸磁傳感器的標定補償,對標定設備要求極高,十分容易引入外界磁干擾,從而導致結果不準確。加之,現有多軸矢量傳感器性能參數的標定補償方法主要是針對各單軸傳感器的安裝誤差進行補償,而忽略了對多軸矢量傳感器中各單軸傳感器的零偏誤差、靈敏度誤差的同時補償.針對上述問題,本文以三軸磁傳感器的制造誤差為例,分析誤差產生機理,建立誤差模型,再利用基于橢球假設的三軸磁傳感器誤差標定方法進行標定補償。
1 誤差產生機理分析及建模
根據傳感器誤差產生機理的不同,可將三軸磁傳感器的制造誤差大致分為三類:不正交誤差、靈敏度誤差、零位誤差[2-8]。
1.1 不正交誤差
三軸磁傳感器軸間的不正交誤差是指由于在制造過程中三個磁傳感器的測量軸無法保證兩兩完全正交所引起,其不正交角模型如圖1所示。
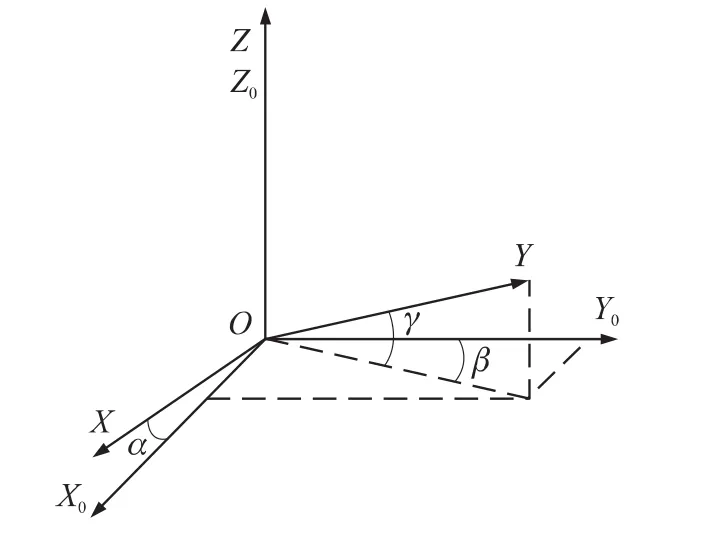
圖1 不正交角模型
如圖1所示,X0、Y0、Z0表示理想正交模型中三軸磁傳感器的矢量指向;X、Y、Z表示實際磁傳感器三軸的指向;假設Z軸與正交模型中的Z0軸重合,且XOZ面與X0OZ0面重合,α為X軸在XOZ面與軸X0的夾角;β為Y在X0OY0面的投影與Y0的夾角;γ為Y與X0OY0面的夾角。由此可建立三軸磁傳感器不正交角的數學模型如下:
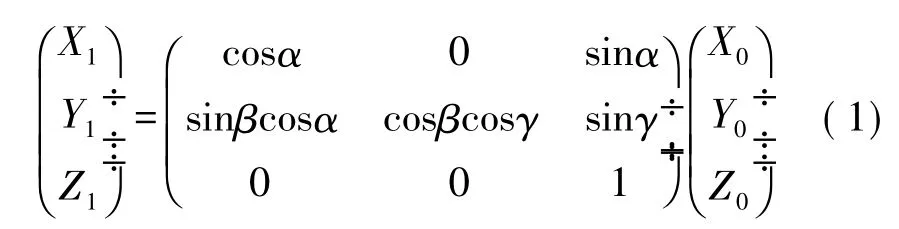
式中:X1、Y1、Z1為存在不正交誤差情況下的三維磁場強度;X0、Y0、Z0為三軸磁傳感器的理論輸出值;α、β、γ為三軸磁傳感器軸間的不正交誤差角,具體定義如圖1。
1.2 靈敏度誤差
軸間靜態靈敏度誤差是由于三軸磁傳感器各軸的靈敏度不同、測量信號的放大電路特性不完全相同而引起的測量誤差,其數學模型為:
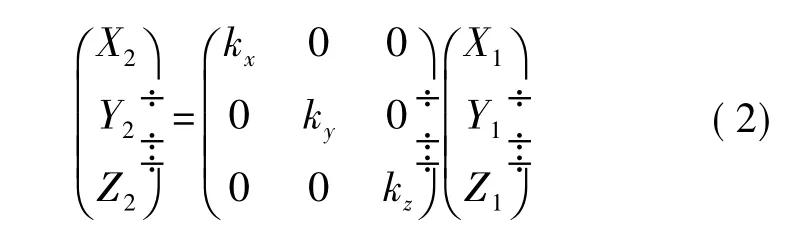
式中:X2、Y2、Z2為存在靈敏度誤差、不正交誤差情況下的三維磁場強度;X1、Y1、Z1為存在不正交誤差情況下的三維磁場強度;kx、ky、kz為三軸磁傳感器的靈敏度。
1.3 零點偏移誤差
由于實際使用時,傳感器、模擬電路和A/D轉換的零點不為零而產生了零點偏移誤差,其數學模型為:
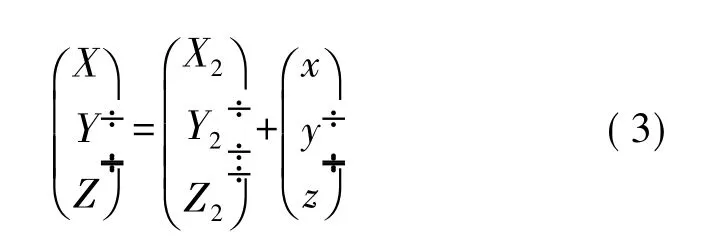
式中:x、y、z為三軸磁傳感器的零偏,X、Y、Z為存在零點偏移誤差、靈敏度誤差、不正交誤差情況下的三維磁場強度。
1.4 誤差建模
綜上所述,建立三軸磁傳感器誤差的數學模型:

2 誤差標定與補償
2.1 誤差標定
理想情況下,三軸磁傳感器的理論輸出值X0、Y0、Z0可構成圓球面,但是由于制造誤差的存在,圓球面畸變成原點平移的橢球面[9-12]。
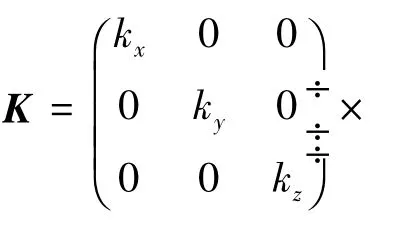
先記理論三維矢量和為Gb,則方程(4)可表示為:

式中,K為誤差系數矩陣;G為三軸磁傳感器理論輸出;g為三軸磁傳感器零偏。假設最佳擬合橢球曲面的二次型函數F(ξ,Z)用矩陣記號表示為:

根據式(5)和式(6)可得到:
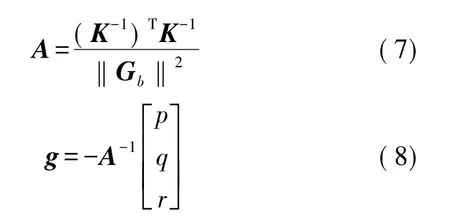
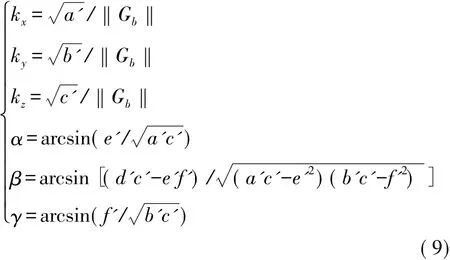
根據式(7)、式(8)可以計算得到式(4)其中參數kx、ky、kz、α、β、γ 的估計值如下:
2.2 誤差補償
在誤差模型的基礎上,根據式(4)可求得傳感器的理論輸出:
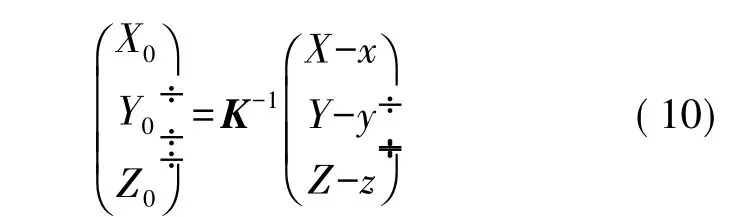
式中:
為誤差補償系數矩陣,α、β、γ可由誤差標定得出,(x yz)T為標定得到的三軸磁傳感器零偏,kx、ky、kz為三軸磁傳感器的靈敏度。
將計算結果代入式(10),即可得到三軸磁傳感器的誤差修正數學模型,依據所獲得的誤補償數學模型即可對該三軸磁傳感器的測量結果進行誤差補償。
3 實驗驗證
為了驗證該誤差補償方法的正確性和有效性,本文以三軸磁傳感器HMC1043為例,采集磁傳感器的實時輸出,根據本文所提出的補償方法進行誤差補償,并利用MATLAB軟件進行試驗數據處理。
首先,選擇磁環境較為潔凈的地方,在空間全范圍內旋轉三軸磁傳感器,并進行實時測量,從而獲得一系列豐富的測量值。試驗后,利用MATLAB軟件繪制出采集的三維磁場數據如圖2所示。
根據上述三維磁傳感器誤差標定方法,解算出磁傳感器的誤差補償系數:


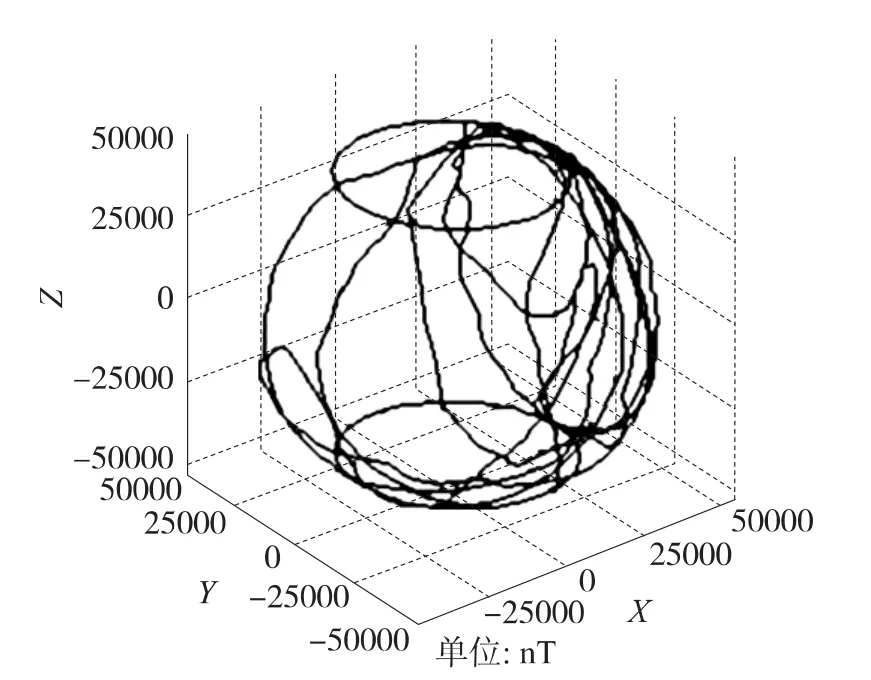
圖2 三維磁場計輸出數據
理論上,三維磁場的矢量和是一個固定常值,但由于實際環境、標定設備等的影響,實際測得三維磁場矢量和波動往往比較大。本次試驗將補償前后三維磁測數據模值標定前后進行對比,補償前三維磁測數據模值的波動高達3 000 nT,而補償后三維磁場模值的波動為400 nT左右,具體如圖3所示。
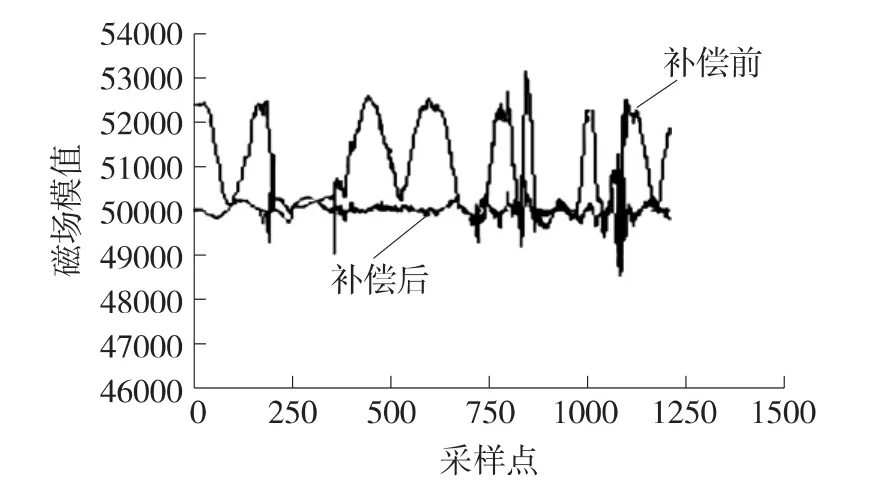
圖3 補償前后磁場模值
實驗結果表明該方法能夠正確地標定三維磁傳感器的誤差系數,有效地將已平移的橢球面逆變成圓球面,實際使用誤差控制在1°以內,實現了三軸磁傳感器制造誤差的高精度補償。
4 結束語
本文所提出的誤差補償方法是基于圓球面畸變成原點平移的橢球面的假設提出的,其逆過程就是誤差補償過程。應用橢球擬合方法來確定矢量傳感器的誤差修正系數,修正過程簡捷、省時、易于實現,能夠廣泛應用于三軸矢量傳感器的誤差標定和有效補償。
[1]楊曉東,王煒.地磁導航原理[M].北京:國防工業出版社,2009:67-80.
[2]袁智榮.磁航向傳感器使用中的誤差補償[J].測控技術,2001,20(1):58-59.
[3]李秉璽,趙忠,孫照鑫.磁阻傳感器的捷聯式磁、航向儀及誤差補償[J].傳感技術學報,2003,6(2):191-194.
[4]張曉明,趙剡.一種快速載體磁場補償方法研究[J].中北大學學報(自然科學版),2009,30(3):286-291.
[5]杜英,李杰,孔祥雷,等.無航向基準條件下電子羅盤的誤差補償方法研究[J].傳感技術學報,2010,23(9):1285-1288.
[6]Grammalidis N G,Strintzis M.Head Detection and Tracking by 2-D and 3-D Ellipsoid Fitting[A].IEEE Computer Graphics.International[C]//Geneva:IEEE,2000:221-226.
[7]臧愛云,原魁,嚴志剛.磁傳感器在導航系統中的應用[J].高技術通訊,2004,10:53-56.
[8]Li Q G,Griffiths J.Least Squares Ellipsoid Specific Fitting[A].IEEE,Proceedings of the Geometric Modeling and Processing 2004[C]//Beijing:IEEE,2004:335-340.
[9]雷芳.地磁陀螺組合的姿態敏感技術[D].太原:中北大學,2009.
[10]閆蓓,王斌,李媛.基于最小二乘法的橢圓擬合改進算法[J].北京航空航天大學學報,2008,34(3):295-298.
[11]郭鵬飛,華春紅,任章,等.基于遞推最小二乘的航姿系統羅差校正[J].中國慣性技術學報,2008,16(1):24-27.
[12]王永強.基于地磁測量的數字羅盤研究[D].上海:上海交通大學,2007.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2016年1期)2016-01-11 16:53:24
Coco薇(2015年1期)2015-08-13 02:47:34
