EH抗燃油油質對機組安全運行的影響
2012-10-19 12:30:52臧旭東
綜合智慧能源 2012年12期
臧旭東
(望亭發電廠,江蘇 蘇州 215155)
0 引言
汽輪機數字電液控制DEH(Digtal Electro-Hydraulic Control)系統是在機電一體化趨勢的推動作用下,計算機技術和液壓技術有效結合的成功應用。根據國內、外液壓系統應用的現狀統計,液壓系統中70%~80%的故障是由液壓系統油液污染造成的。因此,致力于控制固體顆粒的污染,對水、空氣、化學物質和微生物保持高度重視,保證系統具有較高的清潔度,是電廠液壓系統維護人員義不容辭的責任。而汽包水位是汽包鍋爐運行中的一個重要監控參數,它間接地表示了鍋爐負荷和給水的平衡關系,維持汽包水位也是保證汽輪機和鍋爐安全運行的重要條件。汽包水位過高,會使過熱器受熱面結垢導致過熱器燒壞;汽包水位過低則可能造成水冷壁供水不足而燒壞。隨著自動化程度的提高,鑒于給水控制的復雜性,有必要重提給水控制被控對象的動態特性,從而在實際運行操作過程中能采取針對性的控制手段。
1 事故經過
2010-11-18 T 14:54,望亭發電廠#11機組因煙氣脫硫FGD(Flue Gas Desulfurization)系統增壓風機電動機接地,機組負荷迫降至150 MW左右。當時機組控制方式為機跟爐(TF1)方式,給水流量為481 t/h,主蒸汽流量為429 t/h,汽包水位為 -56 mm,主蒸汽壓力為 16.05 MPa,煤量為 60.8 t/h,閥門管理方式為順序閥,主汽門開足,高壓調門GV1,GV2開度均為 100.0%,GV4開度為 14.2%,由GV4調節負荷。
此后負荷仍繼續下降,14:56:35到達147 MW,開始進入GV1和GV2的閥門重疊度臨界區,GV1和GV2的開度從100%瞬間下降到42%,后又恢復到100%。GV2動作正常,在關到42%后迅速回升,而GV1在關到42%后卻反常地沒有回升而是繼續關到0。GV1的突然關閉導致主蒸汽流量從414.2 t/h迅速下降到260.8 t/h(負荷跌至99.148 MW),對汽包水位產生了較大的擾動,給水自動因“蒸發量過低”的邏輯條件而切除。此時雖然蒸發量小于給水量,但由于存在“虛假水位”,汽包水位一開始不但不升反而下降,由于運行人員及時手動減給水,水位在14:57開始回升。在TF1方式下,由于GV4穩定主汽壓的自動調節作用,使得蒸發量又開始逐步回升到400 t/h,而給水量卻保持不變。14:58,汽包水位逐漸下降到-144 mm時,運行人員才開始快速補充給水,給水量瞬間最大達1300 t/h(給水泵轉速已高達5800 r/min),使得蒸發量和給水量比例嚴重倒掛。15:00,汽包水位高引起主燃料跳閘(MFT)。
2010-11-19下午大機掛閘后,熱工、機務人員在運行人員的配合下靜態調試GV1:操作閥門開/關、指令和反饋均正常;在給水泵軟手操面板上操作給水泵A、給水泵B的低壓調門和高壓調門,開、關指令和反饋均正常,未發現異常。但是熱工、機務人員對GV1的MOOG閥還是進行了更換。
2 原因分析
2.1 GV1突然關閉的原因
由靜態試驗可知,DEH調節回路和MOOG閥本身均沒有故障,主要原因是EH油系統中的污染物使MOOG閥的間隙和孔口發生堵塞,將閥門卡住,造成動作失靈。
電液伺服閥是一種高性能、高精度的電液控制部件,是電液伺服系統中的關鍵部件,它的性能和使用方法是否正確將直接影響整個系統的控制精度和響應特性,也直接影響系統的可靠性和使用壽命。而伺服閥的使用壽命和可靠性與工作油的污染程度密切相關,工作油不清潔,輕則影響性能、縮短壽命,重則使伺服閥不能工作。部分電廠也發生過電阻率超標引起MOOG閥大批量損壞的事件。因此,安裝伺服閥的液壓系統必須徹底清潔并定期濾油。
污染往往是造成元件磨損和卡澀故障的重要原因,污染物主要是固體顆粒物,其主要來源有2種:一是外界侵入,如注油和檢修過程中帶入的污染物;其次是系統內部生成,如金屬氧化腐蝕后產生的顆粒物。固體顆粒物進入元件運動間隙內,對零件表面產生切削磨損;同時,固體顆粒物堵塞伺服閥的間隙和孔口,會引起閥芯阻滯和卡緊,影響閥門的工作性能,造成閥門動作失靈,導致系統故障。
更換新油后,應該建立新油是“臟油”的概念,除了徹底清洗油箱底部以外,必須用沖洗板沖洗,運行中要根據油質動態等級監視的實際情況,經常進行在線濾油。此外,還需控制好油溫,局部油溫過高會加速氧化物質的生成,對金屬產生腐蝕作用,加劇磨損,也會產生雜質。望亭發電廠#11機組大修中對EH油進行了全部更換,如果沖洗和濾油不徹底,難免殘存污染物。加上該機組已運行數月,調門局部溫度偏高,也會產生上述污染物。
2.2 給水自動切除的原因
由于蒸發量低于304 t/h,低流量下給水量測量不準確,不利于自動調節,分散控制系統DCS(Distributed Control System)便根據邏輯條件轉入運行手動方式。
2.3 給水操作方式切MEH手操面板的原因
運行人員在對模擬量控制系統MCS(Modulation Control System)中給水泵A,B軟手操進行操作時,指令超高限達到84.0%。給水泵汽輪機電液控制系統MEH(Micro Electro Hydraulic Control System)中對接收的硬接線指令要求不得大于84.0%(相當于 17.30 mA)或小于 51.8%(相當于 10.67 mA),否則MEH控制為了防止給水泵超速或低于3000 r/min引起調速不穩定,便判斷 MCS出壞信號,因此,控制方式切至MEH面板手動方式。
互聯網信息技術的快速發展在一定程度上有效改善了以往的公共圖書館發展模式。當下很多行業進行信息化、網絡化的持續不斷改造與創新,其目的都是為了能夠有效實現各種行業能夠和互聯網之間進行有效融合。通常情況下,“互聯網+”后面那個加號所代表的含義一般指的是各種行業的有效融合,并不是指代替這種最基本功能。因此,相關公共圖書館管理者應該把互聯網充分的應用到所有可以被互聯網使用的地方中去[2]。然后,再以互聯網對不同節點中的改變與創新,進而有效實現整個公共圖書館行業的整體變革,這就充分地把傳統行業和“互聯網”融合的功能發揮出來。
2.4 汽包水位高引起MFT的原因分析
2.4.1 給水控制系統解析
根據汽包水位的能量平衡和物質平衡方程式可得到汽包水位的動態方程式

式中:h為水位變化量相對于額定值的百分比;τW為給水流量項的時間常數;τM為燃料量項的時間常數;τD為蒸汽流量項的時間常數;τp為汽包壓力項的時間常數;μW為給水流量變化量相對于額定值的百分比;μM為燃料量變化量相對于額定值的百分比;μD為蒸汽流量變化量相對于額定值的百分比;p為汽包壓力;KW,Kp,KM,KD為各有關項的放大系數;τ1,τ2為水位的時間常數。
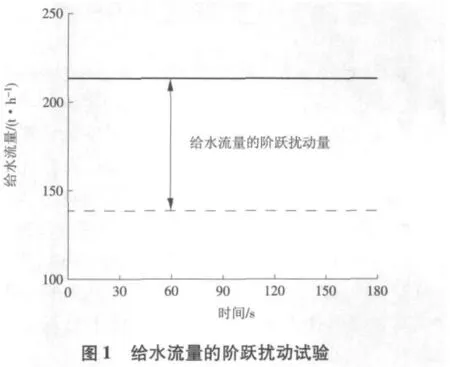
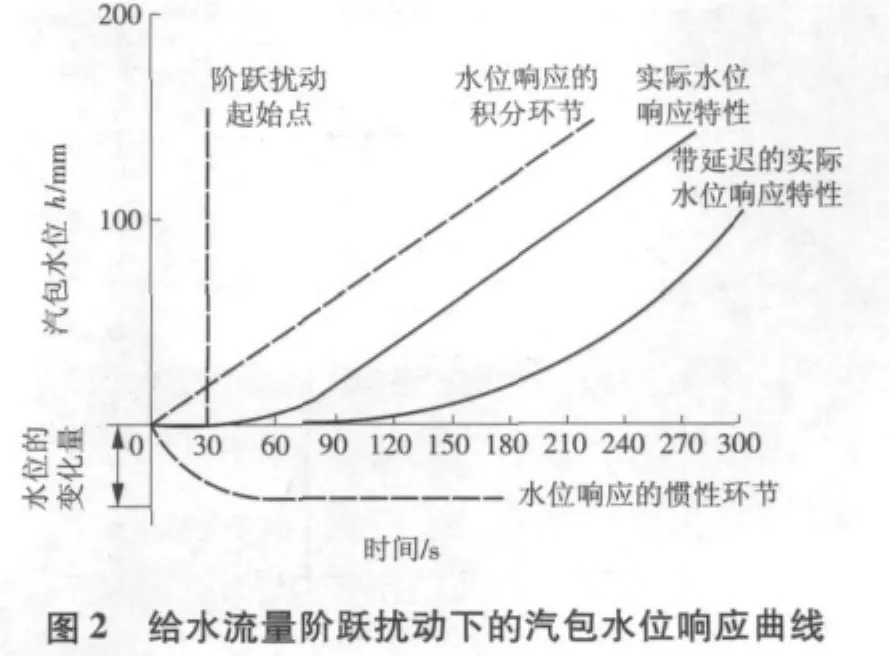
由上式可以看出,汽包水位的擾動有4個來源:一是給水方面的擾動,二是蒸汽負荷的擾動,三是燃料量的變化,四是汽包壓力的變化。給水內擾的特點是開始水位變化很慢,一段時間后逐漸增加,最后直線上升(如圖1、圖2所示)。因此,可以近似認為是一個積分環節和一階慣性環節的并聯或串聯形式,根據物質不平衡作用,如果給水量和蒸汽量不能平衡,水位將不能穩定。
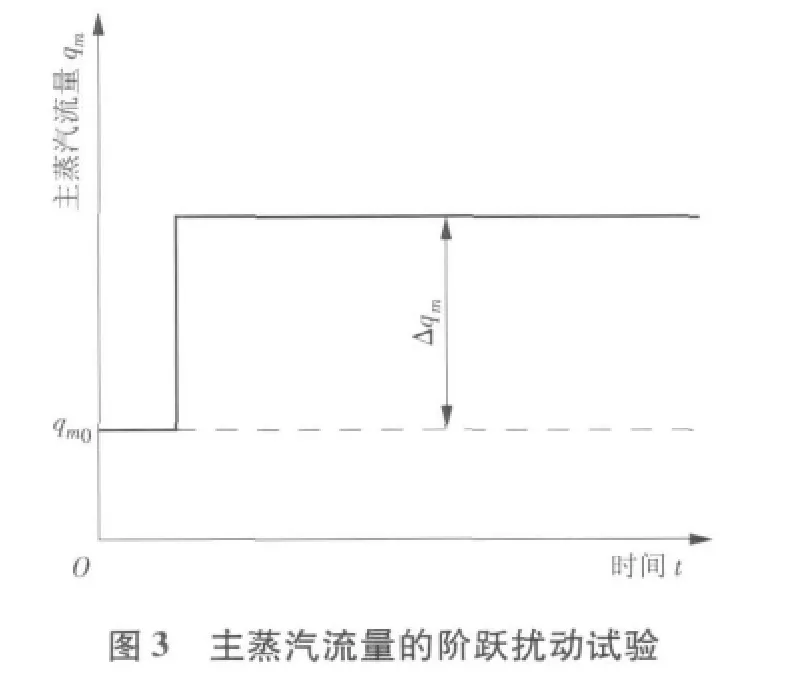
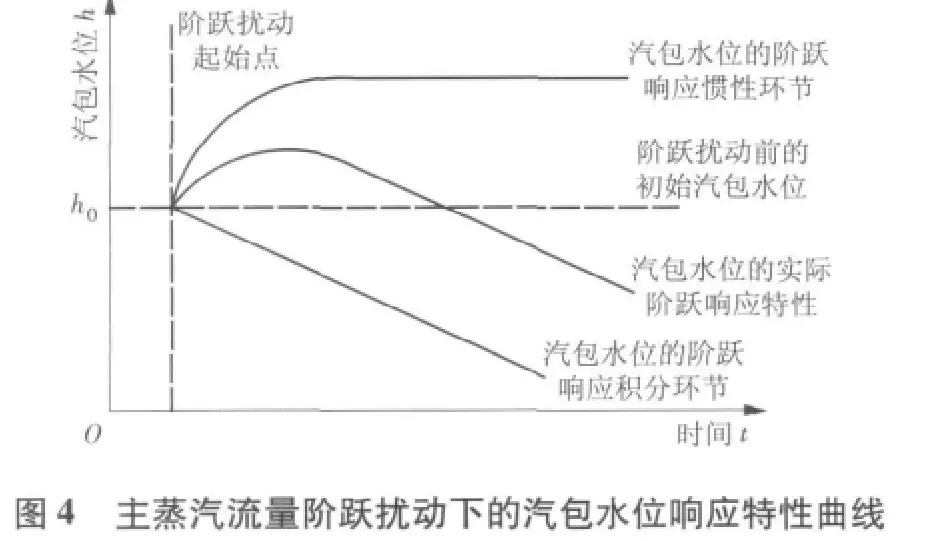
蒸汽外擾的特點:當用汽量突然減少,蒸發量小于給水量,但一開始水位不但不上升反而下降,這種變化趨勢相反的現象稱為“虛假水位”。當汽包容積和負荷相適應而穩定后,汽包水位才隨物質不平衡而上升(如圖3、圖4所示,圖中:qm0為階躍擾動前的初始主蒸汽流量;Δqm為主蒸汽流量的階躍擾動量)。因此,蒸汽擾動下的水位可視為積分環節和慣性環節并聯。
給水控制的特點:當水位偏離設定值后再調節給水量,則會由于給水變化有一定的滯后而影響水位。由于影響汽包水位的因素很多,且存在能使DCS的調節回路產生誤判斷的“虛假水位”,因此,給水控制系統的設計中常常采用三沖量或多沖量控制。將蒸汽流量和給水流量的變化分別作為汽包水位控制的前饋信號和反饋信號,從而可在內擾和外擾發生時迅速準確地消除擾動,使水位基本不受影響。
2.4.2 運行中實際操作曲線解析
根據圖5來分析事故發生前、后的運行參數。當GV1突然關閉,蒸發量減少時,汽包產生了“虛假水位”(水位下降),調整給水流量后,水位止跌回升。在TF1方式下,GV4調門為自動調節主汽壓而開大,使蒸發量上升回到原位,在這個過程中,給水流量在手動方式且運行人員并沒有及時進行補充,當水位下跌到-144 mm左右時,運行人員才迅速手動調節給水流量,使其直線上升到1300t/h左右,造成蒸汽量和給水量嚴重不平衡,最終導致高水位而引起MFT。從曲線可以看出,運行人員調節給水流量的時機偏晚,調節量明顯過大。
3 采取的措施
(1)加強對EH油液的污染控制和管理,見表1。必須加強在線濾油和沖洗,確保油質始終不受污染。過濾則是目前控制污染的重要手段,只有通過主動維護,預先維修,才能避免設備事故的發生。
(2)加強運行人員對機組異常工況下汽包水位控制的操作技能培訓,提高操作技能和事故處理能力。
(3)更換GV1的MOOG閥。
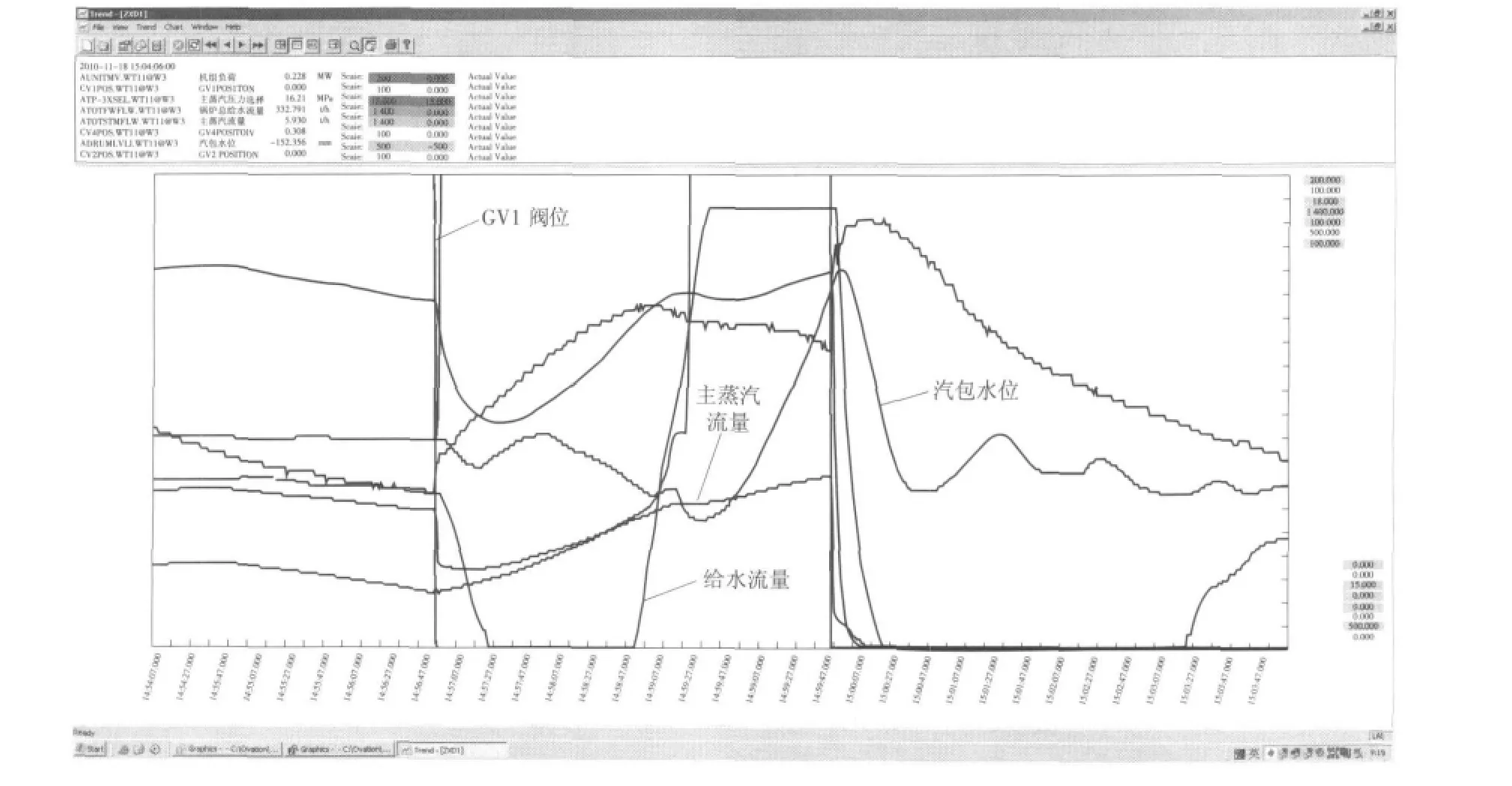
圖5 事故發生時的運行實際操作歷史曲線

表1 污染源與控制措施
(4)根據運行要求,對MCS遙控給水泵指令進行限位,使其輸出指令不會超出卡件設置的正常信號范圍;在 MCS的手動/自動操作站畫面里添加MEH手動操作端的快捷按鈕;為防止小機飛車,需添加“給水泵跳閘后使調門指令優先變為0”的邏輯。
(5)由于給水自動切除時,機組仍在TF1方式,因此,建議在汽包水位自動切除的瞬間由協調控制系統(CCS)邏輯直接切到BASE方式,先保持調門不動,便于運行人員維持蒸發量和給水量的動態平衡,使水位盡早穩定下來,然后再投入高調門的主蒸汽壓力自動。
[1]張玉鐸,王滿稼.熱工自動控制系統[M].北京:水利電力出版社,1985.
[2]雷天覺.新編液壓工程手冊[M].北京:北京理工大學出版社,1998.
