水下拖體和拖纜運動模型研究探討*
2012-10-16 08:04:48曹帥輝
艦船電子工程 2012年12期
曹帥輝
(中國船舶重工集團公司第七一〇研究所 宜昌 443003)
1 引言
近年來,隨著海洋工程的發展,水下拖曳系統作為一種水下探測平臺得到了廣泛關注,如海洋環境勘測、海洋石油開發等。一般來講,此類拖曳系統可簡化為由水面拖船、拖纜、水下拖體組成的多體系統,如圖1所示,其中,水下拖體作為搭載各種探測儀器的主體,在設計時需要研究其運動特性,并采取相應的控制手段確保其運動穩定性。
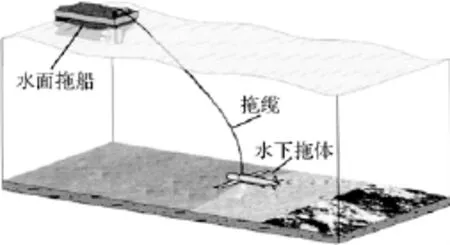
圖1 水下拖曳系統示意圖
水下拖體在運動時所受的干擾主要由流場干擾和拖纜干擾兩部分組成。在海洋工程中,由于拖曳深度較深,通常只研究拖纜干擾。拖纜干擾主要由流場干擾、自身振動干擾和拖船干擾幾部分組成,其中,拖船干擾通常被認為是主要部分。拖船在波浪上的不規則運動常會通過拖纜傳遞到拖體上,從而對拖體產生不穩定擾動,擾動程度取決于作業海況和拖船對波浪的響應程度,這種擾動常常會導致拖體中的儀器超出正常工作范圍。因此,迫切需要建立拖船、拖纜和拖體的系統運動模型,研究拖船干擾對拖體運動的影響,為水下拖曳系統的研制提供基礎。
針對上述情況,本文將結合水下拖曳系統的工程實際,建立由拖船、拖纜和拖體組成的水下拖曳系統的運動模型,并進行仿真研究,研究拖船干擾對拖體運動的影響。
2 水下拖體運動模型
記水下拖體在地面慣性坐標系中的廣義位置向量為η=[x y z φ θ φ]T,其中,x,y,z為水下拖體浮心處的坐標,φ,θ,φ為水下發射平臺的俯仰角、偏航角和橫滾角;同時記水下拖體在其隨體坐標系中的廣義速度向量為v=[vxvyvzωxωyωz]T。
根據Newton-Euler方法,將體坐標系下水下拖體的運動方程寫成矢量形式有:

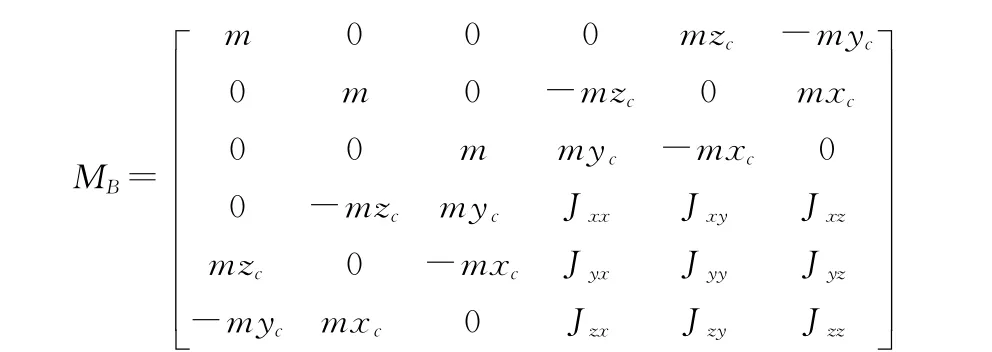
式中,M=MA+MB為廣義質量矩陣,MA為附加質量矩陣,MB為水下拖體的質量矩陣,有:

C=CA+CB為Coriolis矩陣,CA為附加流體的Coriolis矩陣,CB為水下拖體的Coriolis矩陣,有:




其中,VCE為水下拖體壓力中心的速度;Φ為旋轉角,定義為:Φ=tan-1(-vCE/wCE);rCE為體坐標系原點到水下拖體壓力中心的距離矢量;CA為水下拖體在縱平面內的阻力系數,CN水下拖體在縱平面內的升力系數,CA和CN可通過流體動力參數試驗獲得。
另外,拖纜對水下拖體的作用力fM由水下拖體和拖纜之間的邊界條件決定。
3 拖纜運動模型
在本文的建模中,拖纜被假設成連續的細長圓柱狀纜索,并將其看成完全繞性構件,忽略其剪應力和彎矩,沿拖纜軸向的應力只能為張力。

式中,


其中,d0為拖纜直徑,w為單位長度拖纜在水中的重量,(ut,un,ub)為拖纜微元相對于水的運動速度,(vwet,vwen,vweb)為水流速度在拖纜局部坐標系中的分量,ct和cn為拖纜的切向和法向阻尼力系數。
4 邊界條件
系統運動模型求解的邊界條件即為拖纜的首端和自由端(系留點)的邊界條件。
1)首端邊界條件:

式中,下標bottom表示拖纜下端點,速度Vbottom為船在波浪等外界干擾下的速度。
2)自由端邊界條件
(1)速度邊界


(2)拉力邊界

式中,(Ttop,0,0)T為拖纜自由端所受拉力在拖纜局部坐標系中的坐標矢量,fM=(fMx,fMy,fMz)T為拖體受拖纜拉力在其體坐標系中的坐標矢量。
聯立方程(1)~(6)即得到水下拖曳系統的運動方程組,在給定初始運動條件的情況下,結合相應的數值算法,該系統的運動模型可以封閉求解。
5 仿真算例與結論
在上述系統模型下,對某直徑為0.34m,長度為1.57m的拖體,在水面拖船拖曳下進行仿真,拖船速度6.28m/s,波高1m,波浪周期6s,波向與拖體呈45°夾角,拖體在水下的92m附近能實現穩定拖航,其仿真計算結果如圖2。
由仿真結果可看出,當拖船受到波浪等外界因素干擾時,拖體的位置和姿態也隨之改變,該運動模型建立可很好得反映了水下拖體受干擾情況下的運動狀況,通過不同外界條件的仿真,可很好得評估整個拖曳系統的安全運動工況,為水下拖曳系統的研制及實海況試驗提供參考。

圖2 拖體在水中位置與姿態隨時間的變化曲線
[1]Ablow C M,Schechter S.Numerical simulation of undersea cable dynamics[J].Ocean Engineering.1983,10(6):443-457.
[2]Fossen T I.Guidance and control of ocean vehicles[M].UK:John Wiley&Sons Ltd.,1994.
[3]Hearn,G.H.,Thomas,D.O..The influence of practical time integration schemes on dynamic mooring line analysis.Proc.of the 23th Offshore Technology Conference OTC Paper 6604,1991,397-409.
[4]Jason Evans,Meyer Nahon.Dynamics modeling and performance evaluation of an autonomous underwater vehicle[J].O-cean Engineering,2004,31:1835-1858.
[5]Jiaming Wu,Allen T Chwang.A hydrodynamic model of a two-part underwater towed system[J].Ocean Engineering,2000,4(27):455-472.
[6]休斯頓,劉又午.多體系統動力學[M].天津:天津大學出版社,1991:1-103.
[7]劉樂華,羅金玲.水下錨系動基座發射系統動力學建模[J].艦船科學技術,2005,27(6):54-57.
[8]邵成,艾艷輝,代軍.水下錨系導彈發射系統運動研究[J].兵工學報,2011(9).
[9]邵成,宋保維,李家旺,等.攜帶正浮力載荷AUV的載荷分離運動仿真研究[J].系統仿真學報,2008(9).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19