船用捷聯慣性導航系統慣性系快速對準算法*
2012-10-16 08:07:06柴永利
艦船電子工程 2012年2期
關鍵詞:水平
柴永利 張 鑫 章 波
(1.中國空空導彈研究院 洛陽 471000)(2.哈爾濱工程大學自動化學院 哈爾濱 150001)(3.中國石油管道蘭州輸氣分公司 蘭州 730070)
1 引言
初始對準是慣性導航系統的關鍵技術之一[1~3],對準精確性和快速性直接影響到慣性導航系統的性能。當艦船處于系泊狀態時,由于風浪作用將產生搖擺及蕩運動。由搖擺引起的干擾角速度遠大于地球自轉角速度,此時陀螺輸出中的信噪比十分低,且干擾角速度具有很寬的頻帶[4~5],無法從陀螺輸出中將地球自轉角速度這一有用信息提取出來。另外,搖擺及蕩運動也導致加速度計的輸出中存在較大的干擾加速度。雖然水平調平+羅經回路的方法可以較好地解決對準精度問題[6~7],但是航向誤差與北向速度誤差的耦合較弱導致航向對準速度較慢。文獻[8]提出了利用水平失準角估計值快速計算方位失準角的算法,但該算法用到了失準角的微分,其高頻噪聲很難被濾除;文獻[9]利用重力加速度在慣性系下的圓錐慢漂的特性,提出了基于慣性系的對準方案,如何獲得準確的重力加速度信息成為實現慣性系對準的關鍵[10~13]。
本文利用捷聯慣導水平對準精度較高且速度較快的特點,在完成水平對準后直接計算出重力加速度在基座慣性系的投影,進而實現慣性導航系統的初始對準。
2 慣性系對準原理
在對準過程中用到了導航坐標系(n系)、載體坐標系(b系)、慣性坐標系(i系)、基座慣性坐標系(ib0系,初始時刻經過慣性凝固的載體坐標系)以及水平坐標系(h系,zh與zn重合、ohxhyh平面為水平面的直角坐標系)等坐標系。上述坐標系之間的關系如圖1所示。
按照圖1可確定b系與n系的轉換關系:
其中,

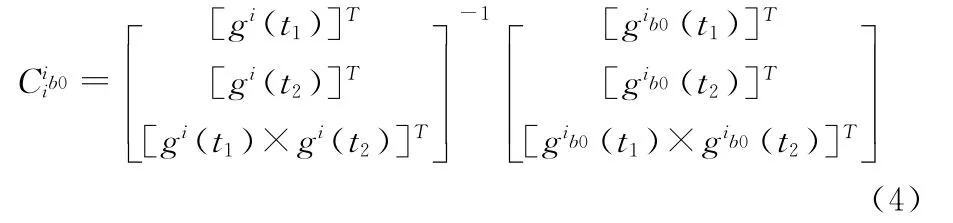
其中,L為當地緯度;ωie為地球自轉角速率;t0為慣性系對準開始的時刻;可由陀螺輸出實時更新(初值為單位陣);因此只需確定即可完成初始對準。根據雙矢量定姿的原理[14],可以通過兩個時刻重力矢量在i系和ib0系下的投影獲得:
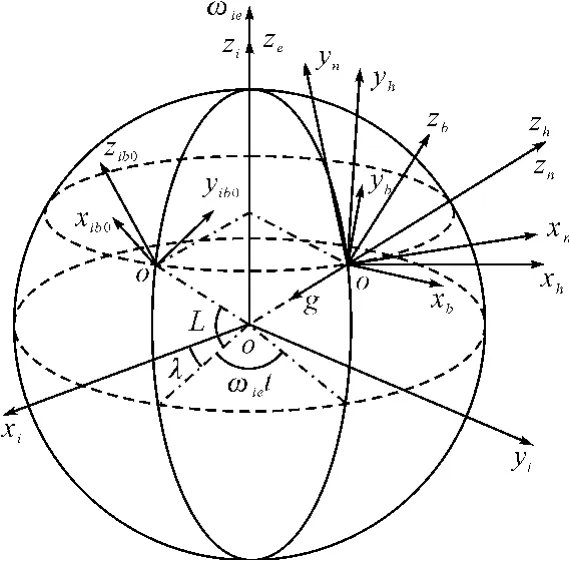
圖1 各個坐標系相對位置關系
3 捷聯慣性導航系統慣性系快速對準算法
忽略加速度計零偏的影響,載體靜止時加速度計的輸出fb即為重力加速度在載體坐標系上的投影,采用慣性系對準算法很容易實現捷聯慣導初始對準。系泊條件下,加速度計的輸出還包括搖擺及蕩引起的干擾加速度,很難從中提取出對準所需的重力信息,為此采用水平精對準方法獲得。
3.1 水平精對準算法
捷聯慣導系統的速度誤差信息包含了水平失準角信息,通過觀測速度誤差并設計合理的控制回路即可完成水平對準。本文采用三階調平回路實現捷聯慣導水平精對準。
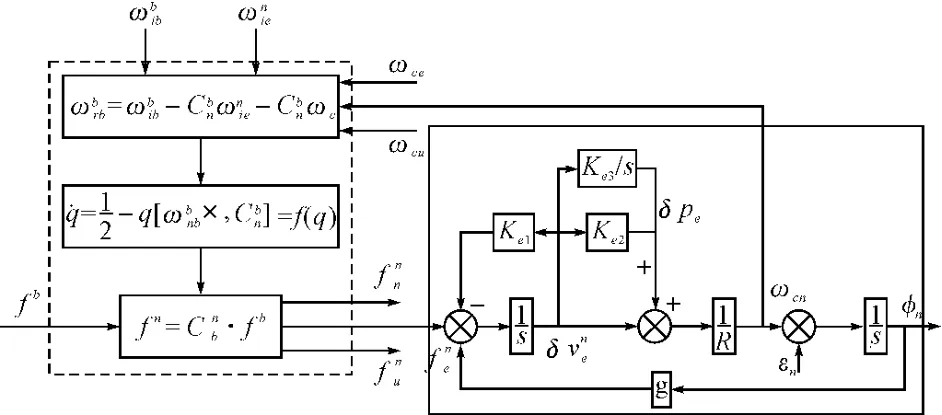
圖2 捷聯慣導水平對準東向通道
3.2 慣性系對準的實現
在水平對準完成后,仍控制捷聯慣導系統工作在水平對準模式。根據水平坐標系定義,b系與n系的轉換矩陣即為捷聯慣導完成水平對準后的捷聯矩陣。由于h系和n系同為當地水平坐標系,因此gh=gn=[0 0 -g]T。重力矢量在ib0系的投影可按照式(5)獲得:

為減小水平對準波動對gib0(t)的影響,采用加權求平均濾波算法對其進行消噪處理。這種方法是最簡單的一種信號處理方式,算法公式如下:設已知等距采樣x0<x1<…<xn-1<…上的觀測數據為y0,y1,yn-1,…,表示yi的平滑值。取加權系數為1則有:

4 仿真及系泊試驗
4.1 仿真試驗
1)假設在風浪影響下,艦體的航向角ψ、縱搖角θ和橫搖角γ作周期變化:

2)存在橫蕩、縱蕩和垂蕩引起的線速度:

3)桿臂長度:lx=20m,ly=10m,lz=5m;

圖3 慣性系快速對準時序圖
仿真結果如圖4所示。由圖可看出:1)對準精度較高:縱搖、橫搖和航向失準角標準差為 0.0035°(1σ)、0.0086°(1σ)和0.0561°(1σ);2)對準重復性較好:縱搖失準角波動范圍為-0.00354°~-0.00352°,橫搖失準角波動范圍為0.00859°~0.00864°,航向失準角波動范圍為-0.0565°~-0.0557°。如果采用水平調平+羅經回路方法進行對準,根據慣性器件誤差與水平調平+羅經回路對準誤差的對應關系[16],并考慮所設定的慣性器件精度,其對準誤差應與仿真結果基本吻合。因此認為仿真試驗中對準誤差主要由慣性器件誤差引起。

圖4 慣性系快速對準仿真試驗結果
4.2 系泊試驗

圖5 系泊對準試驗設備
為進一步驗證上述對準算法的有效性,利用哈爾濱工程大學研制的中等精度光纖陀螺捷聯慣導系統(以下簡稱光纖慣導)開展系泊試驗。其中光纖陀螺陀螺漂移約為0.01°/h,加速度計零偏約為10-4g。將光纖慣導與Ixsea公司的PHINS固定在剛性較好的鋁合金板上,在靜態條件下重復多次測定二者之間的固定安裝偏差。對準時間的選取與仿真試驗中采用的一致,對準完成后轉入純慣導工作狀態。在光纖慣導對準過程中使PHINS工作在與GPS組合模式,光纖慣導輸出姿態并經固定安裝偏差補償后得到姿態角ψ1、θ1和γ1,與 PHINS輸出的姿態角ψPHINS、θPHINS和γPHINS作差,得到姿態誤差角δψ、δθ和δγ。按式(6)對姿態誤差角進行1分鐘平滑后得到姿態誤差角的平均值δˉψ、δˉθ和δˉγ。并以δˉψ、δˉθ和δˉγ考察系泊對準精度。
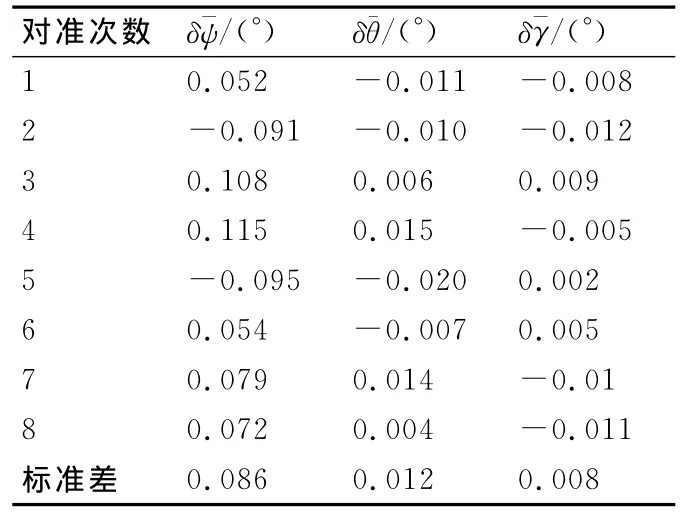
表1 系泊試驗結果
5 結語
本文提出了一種系泊條件下捷聯慣性導航系統快速對準方法。通過三階調平回路完成捷聯慣導水平精對準,確定載體坐標系與水平坐標系之間的關系。利用重力加速度在水平坐標系為常值這一已知條件,將重力加速度投影到基座慣性坐標系并進行平滑處理,進而利用慣性系對準原理實現了艦載捷聯慣導初始對準。通過仿真試驗和系泊試驗可以看出,該方法不需要外界參考信息,同時具有工程實現簡單、對準精度高、對準時間短的優點。定量分析慣性器件誤差與慣性系快速對準精度之間的關系,以及合理地調整水平精對準控制回路參數是下一步的研究方向。
[1]李東明,談振藩,郝穎.一種新的捷聯慣導系統初始對準方法[J].中國慣性技術學報,2005,13(2):1-4.
[2]郭美鳳,楊海軍,騰云鶴,等.激光陀螺慣導系統擾動基座上的初始對準[J].清華大學學報,2002,42(2):179-181.
[3]嚴恭敏,翁浚,趙長山,等.捷聯慣導系統改進參數辨識初始對準方法[J].中國慣性技術學報,2010,18(5):523-526.
[4]徐博,郝燕玲,劉付強.數字濾波方法在光纖陀螺捷聯羅經系統中的應用[J].儀器儀表學報,2007,28(8):328-331.
[5]練軍想,湯勇剛,吳美平,等.捷聯慣導慣性系動基座對準算法研究[J].國防科技大學學報,2007,29(5):95-99.
[6]經張俊,程向紅,王宇.捷聯羅經的動基座自對準技術[J].中國慣性技術學報,2009,17(4):408-412.
[7]李瑤,徐曉蘇,吳炳祥.捷聯慣導系統羅經法自對準[J].中國慣性技術學報,2008,16(4):386-389.
[8]J.C.Fang,D.J.Wan.Fast initial alignment method for strapdown inertial navigation system on stationary base[C]//IEEE Transactions on Aerospace and Electronic Systems,1996,32:1501.
[9]Gaiffe T,Cottreau Y,Faussot N,et al.Highly Compact Fiber Optic Gyrocompass for Applications at Depths up to 3,000Meters[C]//IEEE Underwater Technology,Proceedings of the International Symposium,2000.
[10]孫楓,孫偉.基于數字濾波的系泊對準技術研究[J].控制與決策,2010,25(12):1870-1874.
[11]秦永元,嚴恭敏,顧冬晴,等.搖擺基座上基于信息的捷聯慣導粗對準研究[J].西北工業大學學報,2005,23(5):681-684.
[12]練軍想,吳文啟,吳美平,等.車載SINS行進間初始對準方法[J].中國慣性技術學報,2007,15(2):155-159.
[13]嚴恭敏,秦永元,衛育新,等.一種適用于SINS動基座初始對準的新算法[J].系統工程與電子技術,2009,31(3):634-637.
[14]趙長山,秦永元,白亮.基于雙矢量定姿的搖擺基座粗對準算法分析與實驗[J].中國慣性技術學報,2009,17(4):436-440.
[15]駱卉子,林雪原,周旻.基于小波降噪預處理的組合導航系統研究[J].計算機與數字工程,2011,39(10).
[16]秦永元.慣性導航[M].北京:科學出版社,2007:263-272.
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年6期)2019-10-08 08:55:48
人大建設(2019年12期)2019-05-21 02:55:32
雜文月刊(2018年21期)2019-01-05 05:55:28
人大建設(2017年6期)2017-09-26 11:50:44
學苑創造·A版(2015年11期)2016-01-14 09:03:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
中國火炬(2010年12期)2010-07-25 13:26:22
中國火炬(2010年8期)2010-07-25 11:34:30
