基于圖像分析的機場跑道毀傷效果評估研究*
2012-10-16 08:06:06薛置瀅
艦船電子工程 2012年2期
蒲 剛 許 鵬 任 平 薛置瀅
(1.第二炮兵指揮學院研究生管理大隊 武漢 430012)(2.第二炮兵指揮學院信息作戰教研室 武漢 430012)
1 引言
在最近的幾場高技術條件下局部戰爭中,空襲已經成為重要作戰樣式,而機場作為空軍遂行空襲任務的重要依托,是飛機著陸、停放及組織保障飛行活動的主要場所。因而,對敵方機場實施摧毀是敵對雙方的重要作戰行動之一。一般說來,機場位于縱深地域,因此,對敵機場毀傷信息的獲取主要依靠衛星和無人機來進行偵察,利用圖像處理和分析技術進行打擊效果評估是當前研究的熱點問題之一。
機場目標一般由飛機活動區(包括跑道、滑行道、聯絡道和停機坪)、作戰指揮保障設施(包括指揮、導航設施)、作戰勤務設施(包括油庫、機庫、彈藥庫、航材庫和供電、修理設施等)、營區等部分組成。由于機場指揮、保障設施的多樣性和可替代性,一般不宜被癱瘓,但機場的起降跑道是飛機作戰必須場所,屬易損部位,可作為機場的要害進行打擊。常規導彈打擊機場跑道一般使用侵徹子母彈,可以達到壓制或癱瘓的目的。
本文充分利用圖像處理和分析技術,研究基于最長跑道距離的機場跑道毀傷效果評估方法,著重研究毀傷后機場跑道彈坑識別算法和機場的最長跑道距離提取算法。
2 毀傷后機場跑道彈坑識別
毀傷后機場跑道圖像的彈坑檢測主要是通過分析彈坑的灰度、形狀、大小、紋理等特征,通過圖像處理、模式識別等方法將毀傷后機場跑道圖像中的彈坑檢測出來。為了識別毀傷圖像上的彈坑目標,相關文獻提出通過建立彈坑模板庫的方法將模板庫中的彈坑模板圖像與毀傷后的圖像作相關性分析,最終檢測出毀傷區域,但是這種方法需要建立的模板數量太多,且很難建立完整的模板庫。因此,本文針對毀傷后機場跑道圖像彈坑的特征,研究一種基于鄰域灰度差值的彈坑識別算法。
本文通過分析像素點的灰度值與其八鄰域像素灰度值的關系來進行彈坑的識別。在機場跑道的局部范圍內,彈坑與跑道的灰度值變化較大且差值穩定,因此可以設置一個彈坑與跑道灰度差的閾值,通過這個閾值來識別機場跑道上的彈坑,經驗值可以作為彈坑與跑道灰度差的閾值,但是由于圖像的多變性使得這個閾值的選取會隨著圖像的變化而變化,且經驗值的選取受主觀因素影響較大,針對這個問題,本文參考文獻[1]中的方法,對閾值的計算方法進行改進。
彈坑與機場跑道灰度差值的閾值計算方法由式(1)確定

式(1)中,(minhistqian)和(minhisthou)分別表示毀傷前后機場跑道圖像的最小灰度值。即用毀傷前后機場跑道圖像的最小灰度值之差作為毀傷后機場跑道圖像的彈坑與跑道灰度差的閾值。
彈坑識別算法如下:
1)計算毀傷前機場跑道圖像的最小灰度值(minhistqian),毀傷后機場跑道圖像的最小灰度值(minhisthou),根據式(1)計算閾值Tc。
2)遍歷毀傷后機場跑道圖像中的每一個像素,計算其與鄰域像素(本文取為八鄰域)的灰度差值,并統計該差值大于Tc的個數n。如果n≥5,則該像素為彈坑點;如果0<n<5,則該像素為疑似彈坑點。
3)把四鄰域中不存在與中心像素灰度差值大于閾值Tc的疑似彈坑點去掉。
4)將八鄰域與中心像素灰度差值大于閾值Tc的單像素疑似彈坑點添加為彈坑點。
3 機場的最長跑道距離提取算法
3.1 機場最長跑道距離的定義
機場跑道遭到子母彈打擊之后,在跑道上散布著不同大小的彈坑。毀傷后機場跑道上存在著符合某型飛機最小起降窗口寬度的跑道區域,其中最長跑道區域的長度稱之為毀傷后機場跑道的最長跑道距離。毀傷后機場的最長跑道距離示意圖如圖1所示。
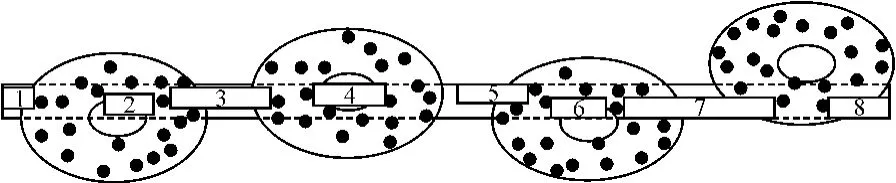
圖1 毀傷后機場的最長跑道距離示意圖
圖1中,標數字的矩形區域均為符合某型飛機最小起降窗口寬度的跑道區域,7號矩形區是其中最長的跑道區域,因此,7號矩形區域的長度為該毀傷后機場的最長跑道距離。
3.2 機場最長跑道距離的提取算法
在提取機場的最長跑道距離之前,需要檢測機場跑道的邊緣,經典的邊緣檢測方法是構造差分算子用以檢測圖像灰度階躍變化。常用的邊緣檢測算子有Sobel算子、Prewitt算子、RobertCross算子、Laplace算子等。本文選用Sobel算子對機場跑道二值圖像進行邊緣檢測。
提取機場最長跑道距離的研究,文獻[2]中的方法是將敵方飛機的最小起降窗口做成模板,以不同的方向在真實的毀傷跑道圖中滑動,通過這種方式來檢測毀傷跑道圖像中是否存在比最小起降窗口大或與之相等的區域。根據毀傷后機場跑道二值圖像的特點,本文對文獻[3]中的最長跑道距離提取算法做了適當的改進。機場上某型飛機的最小起飛寬度為Wp,最小起飛長度為Lp。最長跑道距離提取算法可以描述如下:
1)首先建立一個列向量W=[1 1 1…1]T,其行數為某型飛機最小起降窗口的寬度,本文中某型飛機最小起降窗口的寬度為20m,圖像分辨率為4m,因此向量W 的行數為5,即:W=[1 1 1 1 1]T。
2)在毀傷后機場跑道二值圖像中,尋找機場跑道的邊緣點。采用Sobel算子進行機場跑道的邊緣檢測。
3)令向量W 的起點依次與跑道邊緣點重合,用向量W和機場跑道二值圖像作與運算,若運算結果等于向量W,則擴展向量W 的列數,重復作與運算,直到結果不等于向量W 時,停止運算,那么前一次運算時W 的列數即為該邊緣點在這個方向上的最長跑道L(1,1)。
4)將向量W 在該邊緣點上旋轉一個角度,繼續作第三步的運算,可以得到該邊緣點上在一次旋轉角度后的最長跑道L(1,2)。經過計算,以跑道方向為基準,旋轉(-7°,7°)就可以完全搜索出機場的最長跑道(L(i,j)≥330),然后得到這個邊緣點上的最長跑道距離L(1)由式(2)確定

5)對每個邊緣點作第三步和第四步運算,分別得到L(1),L(2),L(3),…,其中的最大值為機場的最長跑道距離La。
4 機場跑道毀傷效果評估
4.1 機場跑道毀傷效果評估流程
機場跑道的毀傷效果評估流程圖如2圖所示。
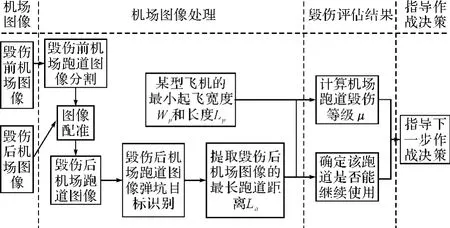
圖2 機場跑道的毀傷效果評估流程圖
圖2中,需要把毀傷前后的機場圖像進行配準,將毀傷前機場跑道的二值圖像和經配準的毀傷后機場圖像作與運算,得到毀傷后的機場跑道圖像。在毀傷后機場跑道圖像上進行彈坑識別,然后用經本文改進的機場最長跑道距離提取算法提取出最長跑道距離。通過比較機場的最長跑道距離和某型飛機最小起降窗口的長度來評估機場跑道的毀傷等級,以此來指導下一步的作戰決策。
4.2 機場跑道毀傷等級劃分方法
判斷機場跑道目標的毀傷等級,本文對文獻[3]中的劃分方法進行改進,建立如式(3)的劃分方法:

式(3)中,La為機場的最長跑道距離,Lp為某型飛機最小起降窗口的長度。當La>2Lp時,毀傷等級μ定為8級,即μ=8。
經過計算,機場跑道毀傷等級的分析評判原則如表1所示。

表1 機場跑道毀傷等級分析評判原則
5 實驗結果分析
通過MATLAB編程實現了基于鄰域灰度差值的彈坑識別算法。彈坑識別的結果如圖3(b)所示。由圖3(b)可以看出,機場跑道上的彈坑已經被識別出來。
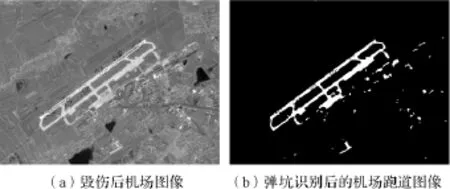
圖3 毀傷后機場圖像和彈坑識別后的機場跑道圖像
為了定量描述彈坑識別的效果,本文參考文獻[4]中評價檢測性能的正確率和虛檢率兩個指標。正確率和虛檢率的表達式為
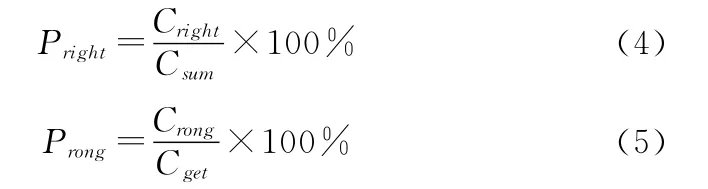
式(4)、(5)中,Csum表示毀傷圖像中的彈坑個數,Cget表示試驗識別出的彈坑個數,Cright表示試驗正確識別出的彈坑個數,Crong表示試驗錯誤識別出的彈坑個數。
經過多次實驗得到的數據如表2所示。
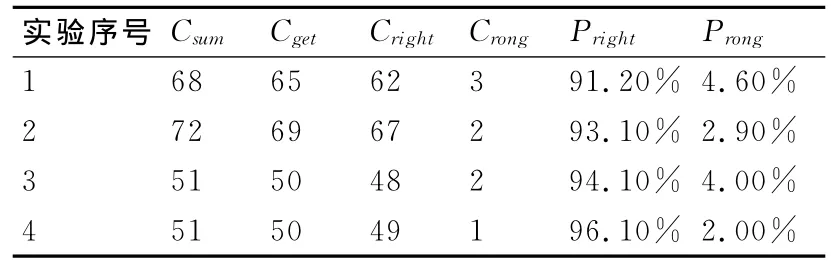
表2 彈坑目標識別實驗結果數據
從表2可以看出,基于鄰域灰度差值的彈坑識別算法識別正確率均在91%以上,虛檢率都低于5%,彈坑識別效果較好。
將彈坑識別后的機場跑道圖像旋轉一定角度,使之與圖像的長邊緣平行,再截取用于飛機起降的跑道圖像如圖4(a)所示。
圖4 用于飛機起降的跑道圖像和提取的最長跑道距離
利用最長跑道距離提取算法來提取圖4(a)中機場的最長跑道距離,結果如圖4(b)所示。實驗測得圖4中的最長跑道距離La為340m,以戰斗機幻影2000為例,其最小起降窗口長度Lp為646m。按照4.2節對機場跑道毀傷等級的劃分準則,圖4中機場跑道的毀傷等級為7.37,毀傷情況為嚴重毀傷,該機場跑道上已經不存在可供飛機起降用的最小起降窗口。
通過對多幅不同毀傷效果的機場圖像進行實驗,得到如表3的實驗數據。
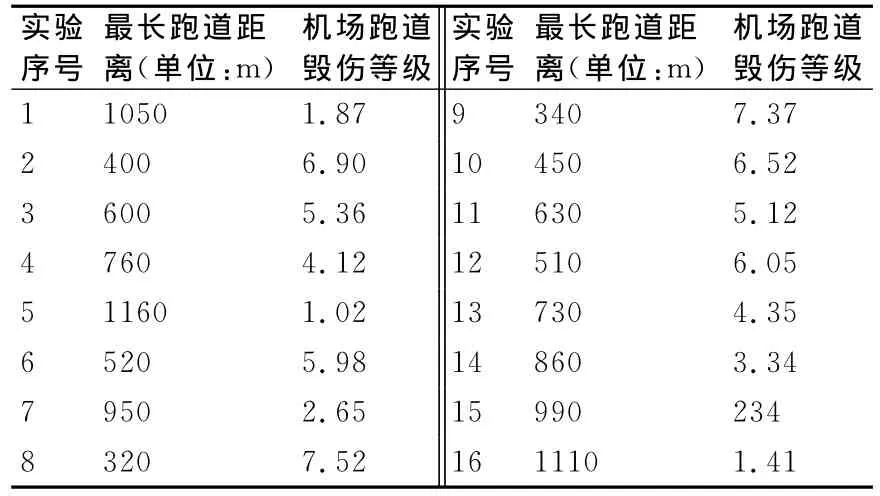
表3 場跑道毀傷效果評估實驗數據
6 結語
本文研究了機場跑道的毀傷效果評估問題。采用經本文改進的基于鄰域灰度差值的彈坑識別算法對毀傷后的機場跑道圖像進行彈坑識別。在彈坑識別后的機場跑道二值圖像上,通過最長跑道距離提取算法提取出最長跑道距離。研究了機場跑道的毀傷等級劃分方法,通過比較機場的最長跑道距離和某型飛機最小起降窗口的長度來評估機場跑道的毀傷等級。實驗表明,基于鄰域灰度差值的彈坑識別算法取得了較好的彈坑識別效果,利用機場最長跑道距離對機場跑道毀傷效果進行評估的結果比較準確、直觀。
[1]王海兵.基于遙感圖像的子母彈機場毀傷的效果分析研究[D].南京理工大學碩士學位論文,2007,7.
[2]馬波.基于圖像分析的機場打擊效果評估研究[D].華中科技大學碩士學位論文,2004,5.
[3]郜鵬飛.機場目標毀傷評估算法研究及半物理仿真系統設計[D].上海交通大學碩士學位論文,2009,1.
[4]陳志鵬,鄧鵬,種勁松,等.紋理特征在SAR圖像變化檢測中的應用[J].遙感技術與應用,2002,17(3):162-166.
[5]尤曉建.基于目標識別的機場跑道打擊效果評估研究[J].計算機與數字工程,2010,38(10).
