基于無刷直流電機的執行器防堵轉系統的設計
2012-09-26 02:27:00張壽春
電子設計工程 2012年8期
張壽春
(上海海事大學 信息工程學院,上海 201306)
在工業過程控制系統中,電動執行器能夠將將接收的控制信號轉換成輸出軸的位移從而控制閥門的位置[1]。傳統的電動執行器采用交流電機來驅動,隨著現代電子技術和電機控制理論的快速發展,無刷直流電機[2]因體積小,控制精度高以及效率高等優點,得到廣泛的應用。目前已有采用無刷直流電機來驅動電動執行器,由于這些設備的工作場合往往環境較惡劣,容易產生堵轉。由于電動機堵轉電流很大,時間過長會燒壞電動執行機構的電動機和控制器。因此防堵轉是無刷直流電機驅動的執行器的關鍵問題。
文中根據無刷直流電機的控制特點,采用ARM核的LPC2132[3]和電流采集硬件保護電路來保護電機及控制器,同時采用軟硬件相結合的方法來使執行器在啟動和運行等不同的狀態下對電流進行精確的控制,從而進行過流保護。結果表明,采用該方法后系統具有良好的防堵轉保護性能及動態響應性能,能智能化處理異常狀況。
1 系統工作原理
系統采用LPC2132芯片微處理單元來控制電動執行器運行。通過各種參數的設置來控制定閥門的回差、速度和行程等。對于堵轉保護電路來說主要有電流采集模塊,限流保護模塊,驅動保護模塊等組成。系統通過直流電源來供電,一路供驅動電路,另一路經過降壓給控制系統供電。因為系統耗電主要是電機驅動電流,所以采集電機的相電流作為判斷處理的依據。是,將電流信號變換為電壓信號,同時提供給驅動電路和微處理器。采集的電流信號與驅動信號相結合共同作為電機的驅動信號,同時微處理器通過獲得的電流數據來進行處理。系統原理如圖1所示。
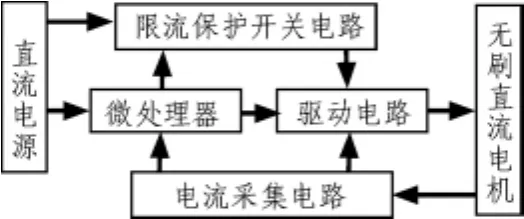
圖1 系統原理框圖Fig.1 Block diagram of system principle
2 硬件電路設計
系統堵轉保護電路主要有二部分組成:一是驅動電流采集電路;二是驅動電源保護控制電路。無刷直流電機常用6個場效應管通過換相導通來驅動,可以選擇電機驅動芯片如MC33035[4]或分立元件組成的驅動電路。電流采集電路如圖2所示,驅動電流在R7上產生一個電壓信號VB,通過R5和C1濾波接入比較器LM2903的反相輸入端,5 V經過電阻R2和R3的分壓接入比較器的同相輸入端。當驅動電流超過設定的電流值時,比較器的輸出為低電平,PWM的信號變低,改變驅動信號的占空比,從而限制了電機的電流。由于電流采集采用了濾波電路,限制的是電流的平均值。用LPC2132的AD口來采集電壓,當超過設定值,關閉PWM信號延時100 μs,否則打開PWM信號。
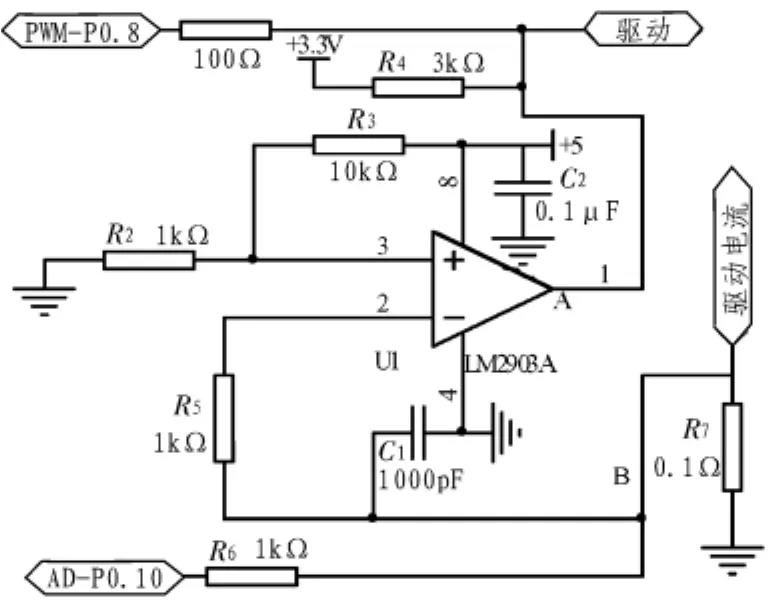
圖2 電流信號采集電路圖Fig.2 Circuit Diagram of electric current signal collecting
在圖3中,電源+24 V通過場效應管IRF4905管的開通來提供電機的驅動電源,Q2所起的作用是個開關。當B點的電壓超過設定的電流極限時,比較器U3輸出的是低電平,與門的輸出是低電平,Q1截止,場效應管IRF4905不導通,從而切斷電機的驅動電壓。在電機正常運轉中,如果電流沒有超過設定值,那么比較器U3輸出的是高電平,同時LPC2132的輸出PWM信號的占空比減小直至為高電平,Q1保持導通使得電源電壓全部加到驅動電路上。采用此部分電路主要是保護供電的開關電源,防止短路電流超過一定的值而導致電源打隔,同時也對電機驅動的尖鋒電流進行保護。
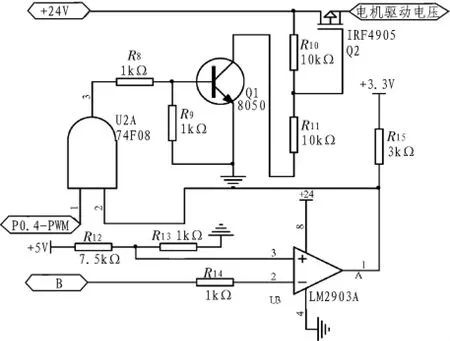
圖3 限流保護圖Fig.3 Circuit diagram of electric current limited protection
3 軟件設計
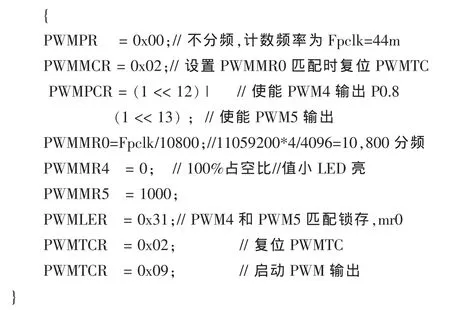
保護系統的主要軟件設計主要有:PWM初始化程序,堵轉判斷程序,電機驅動電流AD采集程序,堵轉后的處理程序等。由于系統需要多路PWM信號,所以利用LPC2132的I/O口的PWM資源來輸出多個信號[5-6]。

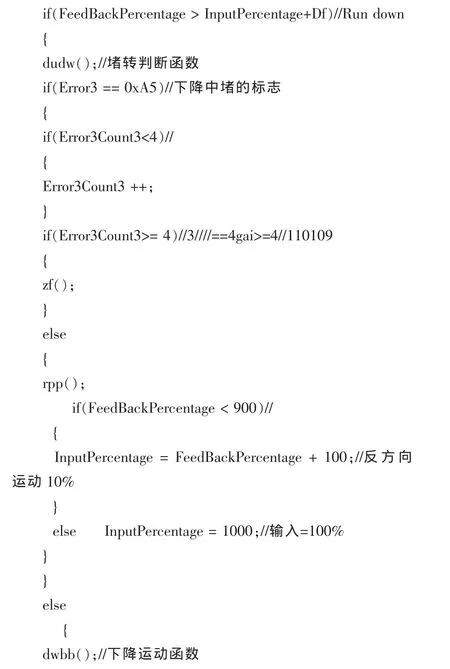
下面的程序主要是堵轉的判斷與處理,例如,當輸入小于輸出時,運動之前程序首先進行堵轉的標志Error3的判斷,如果沒有堵,那么執行器將向下運動。如果發生堵轉,Error3Count3進行計數,進入堵轉處理,反方向運動10%。當堵轉計數達4次,執行器本身仍然堵,則停止運動。如果堵轉計數沒有達4次,而反方向運動10%后堵轉消除,則執行器自動恢復正常,同時計數清零。
4 結束語
由于電動執行器工作現場環境差,執行器容易發生堵轉。特別是采用無刷直流電機來驅動,電機發生堵轉會產生很大的電流,類似與短路,在很短的時間內會燒毀控制器和電機。為了保護電機和控制器,控制器必須有堵轉保護電路。利用比較器將電機驅動電流的信號接入驅動電路,同時通過采集電流的值及電流峰值控制電路來控制供電電源,實現了過流保護,在軟件上采用智能化處理,提高了系統抗干擾能力,增加了系統本身的可靠性。本文所設計的保護電路在發生堵轉后不會出現長時間有大電流通過無刷電機和控制器,從而損壞電動執行機構,現已投入使用,工作可靠,性能穩定。
[1]慈兆會,孔令成,方穎,等.基于TMS320F2812的智能電動執行器控制系統設計[J].測控技術,2010,10(29):55-57.
CI Zhao-hui,KONG Ling-cheng,FANG ying,et al.Control system of intelligent electric actuator based on TMS320F2812[J].Measurement&Control Technology,2010,10(29):55-57.
[2]葉金虎.現代無刷直流永磁電動機的原理與設計[M].北京:科技出版社,2007.
[3]PhilipsSemiconductors.LPC2132 Productdata[EB/OL].[2010-11-07].http://www.alldatasheet.com/datasheet-pdf/pdf/99073/PHILIPS/LPC2132.html.
[4]ON Semiconductors.MC33035[EB/OL].[2011-12-09].http://www.alldatasheet.com/datasheet-pdf/pdf/174254/ONSEMI/MC 33035.html.
[5]周立功,張華.深入淺出ARM7——LPC213x/LPC214x(下冊)[M].北京:北京航空航天大學出版社,2005.
[6]周立功,張華.深入淺出ARM7——LPC213x/LPC214x(上冊)[M].北京:北京航空航天大學出版社,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25