某測(cè)試轉(zhuǎn)臺(tái)電控系統(tǒng)設(shè)計(jì)
2012-09-26 02:27:00田偉強(qiáng)
電子設(shè)計(jì)工程 2012年8期
田偉強(qiáng)
(中國(guó)電子科技集團(tuán)公司第二十七研究所 河南 鄭州 450047)
某測(cè)試轉(zhuǎn)臺(tái)是作為承載小型被試設(shè)備而研制的測(cè)試平臺(tái),使用時(shí)固定于高塔塔頂,以便于瞄準(zhǔn)遠(yuǎn)處及空中目標(biāo)。該測(cè)試轉(zhuǎn)臺(tái)的主要功能是為小型被試設(shè)備提供方位、俯仰角度可調(diào)的通用的搭載平臺(tái),并能夠顯示轉(zhuǎn)臺(tái)指向處的方位、俯仰角度信息和電視觀瞄場(chǎng)景。該測(cè)試轉(zhuǎn)臺(tái)具有角度定位測(cè)量精度高、接口豐富、保護(hù)功能全面等特點(diǎn)。
1 系統(tǒng)組成
測(cè)試轉(zhuǎn)臺(tái)系統(tǒng)由顯控臺(tái)和轉(zhuǎn)臺(tái)兩大部分組成。轉(zhuǎn)臺(tái)置于塔頂,顯控臺(tái)放置在塔上設(shè)置的一個(gè)操控室內(nèi),與塔頂轉(zhuǎn)臺(tái)之間的距離為30米,與轉(zhuǎn)臺(tái)之間通過電纜連接。轉(zhuǎn)臺(tái)由操作人員通過顯控臺(tái)控制。除了轉(zhuǎn)臺(tái)自身的控制信號(hào)之外,作為測(cè)試轉(zhuǎn)臺(tái),顯控臺(tái)與轉(zhuǎn)臺(tái)之間還提供了多個(gè)信號(hào)通路,以方便轉(zhuǎn)臺(tái)上的被試設(shè)備與操控室內(nèi)的測(cè)試儀器之間進(jìn)行信號(hào)連通,以及為被試設(shè)備供電。顯控臺(tái)與轉(zhuǎn)臺(tái)之間的信號(hào)連接關(guān)系如圖1所示。
顯控臺(tái)內(nèi)安裝有時(shí)統(tǒng)單元和可調(diào)直流電源。時(shí)統(tǒng)單元的作用是接收GPS授時(shí)信號(hào)或靶場(chǎng)提供的IRIG-B(AC)時(shí)間碼信號(hào),通過解調(diào)運(yùn)算,輸出IRIG-B(DC)時(shí)間碼時(shí)統(tǒng)信號(hào),通過電纜連接到轉(zhuǎn)臺(tái)上的時(shí)統(tǒng)信號(hào)BNC插座上,為被試設(shè)備提供時(shí)統(tǒng)信息。可調(diào)直流電源為AC/DC開關(guān)電源模塊,其電壓調(diào)節(jié)范圍為2~32v,可提供最大20A的輸出電流,通過電纜連接至轉(zhuǎn)臺(tái),作用是向被試設(shè)備提供直流電源供電。
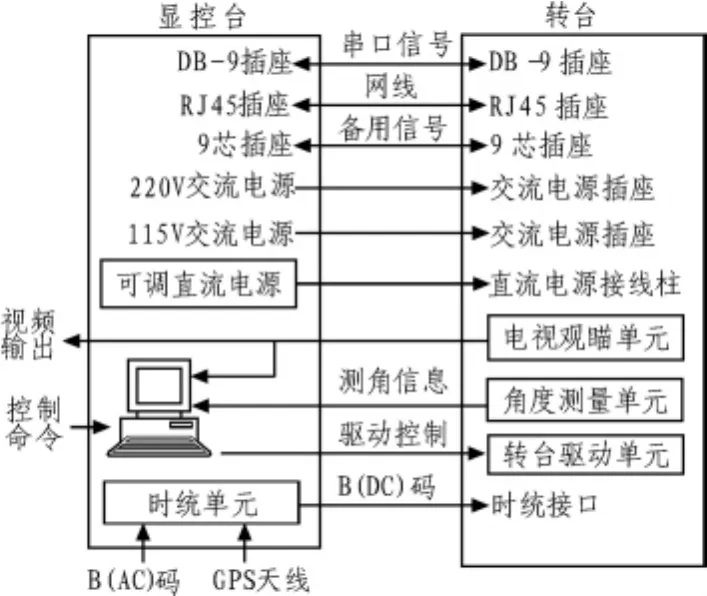
圖1 顯控臺(tái)與轉(zhuǎn)臺(tái)信號(hào)連接示意圖Fig.1 Schematic diagram of signal connection between the turntable and the display and control unit
在顯控臺(tái)上和轉(zhuǎn)臺(tái)上分別設(shè)置有2個(gè)DB9插座、2個(gè)RJ45插座和1個(gè)9芯插座。這些插座分別通過電纜一一對(duì)應(yīng)連接,為轉(zhuǎn)臺(tái)上的被試設(shè)備和操控室內(nèi)的測(cè)試儀器之間提供信號(hào)通路。轉(zhuǎn)臺(tái)上還設(shè)置了兩組各3個(gè)交流電源插座,分別通過電纜連接至操控室內(nèi)的大功率220 V/50 Hz和115 V/400 Hz交流電源上,可為被試設(shè)備提供最大功率為5 kW的交流供電。電視觀瞄單元輸出兩路模擬視頻信號(hào),一路連接至視頻采集卡轉(zhuǎn)換為數(shù)字視頻信號(hào)供顯控模塊顯示在顯控臺(tái)顯示屏上,另一路連接至顯控臺(tái)上的視頻輸出BNC插座上,用以將目標(biāo)圖像直接輸出至靶場(chǎng)監(jiān)視設(shè)備。
系統(tǒng)的工作過程為:將被試設(shè)備架設(shè)在轉(zhuǎn)臺(tái)工作面并固定好之后,系統(tǒng)加電,通過顯控臺(tái)操作面板控制轉(zhuǎn)臺(tái)手動(dòng)搜索目標(biāo)或直接控制轉(zhuǎn)臺(tái)轉(zhuǎn)到指定角度,然后轉(zhuǎn)臺(tái)可自動(dòng)鎖定于該位置,同時(shí)可以在顯控臺(tái)顯示屏上看到電視觀瞄單元采集到的轉(zhuǎn)臺(tái)指向處的目標(biāo)圖像。被試設(shè)備可以在該位置上對(duì)準(zhǔn)目標(biāo)進(jìn)行各項(xiàng)指標(biāo)測(cè)試。
2 伺服控制單元設(shè)計(jì)
伺服控制單元主要由方位和俯仰伺服電機(jī)、方位和俯仰驅(qū)動(dòng)單元、角度測(cè)量單元、電限位開關(guān)、伺服主控單元等構(gòu)成。其主要作用是控制轉(zhuǎn)臺(tái)按指定的方式轉(zhuǎn)動(dòng)并測(cè)量轉(zhuǎn)臺(tái)當(dāng)前的位置和其他狀態(tài)信息。伺服控制單元的組成如圖2所示。
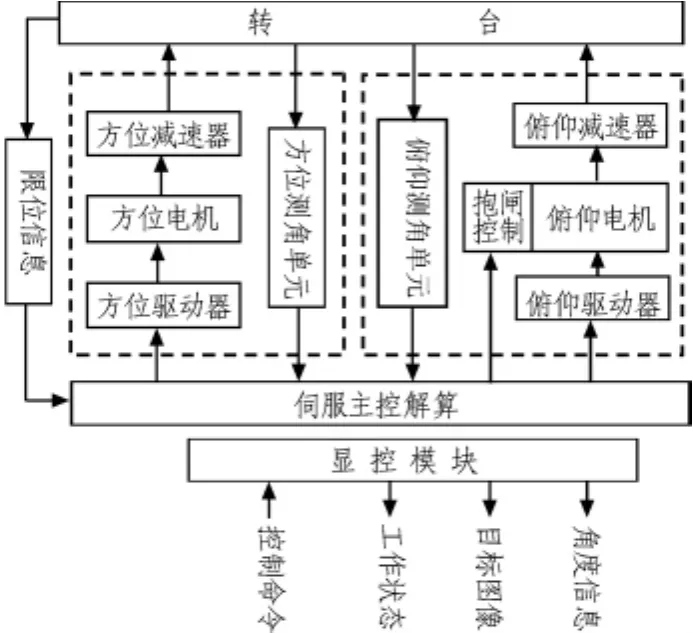
圖2 伺服控制單元組成框圖Fig.2 Block diagram of the servo control unit
伺服電機(jī)采用交流伺服電機(jī),交流伺服電機(jī)因體積小、轉(zhuǎn)動(dòng)慣量小、過載能力強(qiáng)、控制簡(jiǎn)單等特點(diǎn)在高性能、高精度伺服驅(qū)動(dòng)領(lǐng)域應(yīng)用廣泛[1]。電機(jī)與轉(zhuǎn)臺(tái)方位轉(zhuǎn)軸和俯仰轉(zhuǎn)軸之間安裝減速器,驅(qū)動(dòng)單元采用全數(shù)字交流伺服驅(qū)動(dòng)器,驅(qū)動(dòng)單元接收主控模塊的指令驅(qū)動(dòng)伺服電機(jī)轉(zhuǎn)動(dòng)。伺服主控單元包括位于顯控臺(tái)上的工控機(jī)和運(yùn)行于工控機(jī)上的伺服解算軟件和顯控軟件。角度測(cè)量單元為兩個(gè)角度光電編碼器,分別安裝在轉(zhuǎn)臺(tái)方位轉(zhuǎn)軸和俯仰轉(zhuǎn)軸上,用于檢測(cè)轉(zhuǎn)臺(tái)的方位轉(zhuǎn)動(dòng)角度和俯仰轉(zhuǎn)動(dòng)角度,檢測(cè)到的角度信息反饋到主控單元。主控單元將角度測(cè)量單元檢測(cè)到的轉(zhuǎn)臺(tái)當(dāng)前的角位置信息與操作人員所設(shè)定的角度信息相比較,計(jì)算得出方位和俯仰驅(qū)動(dòng)單元的驅(qū)動(dòng)信號(hào),發(fā)送至驅(qū)動(dòng)單元驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)到指定的角度。
在系統(tǒng)未加電時(shí)轉(zhuǎn)臺(tái)的方位和俯仰轉(zhuǎn)動(dòng)機(jī)構(gòu)都處于不受控的自由狀態(tài),此時(shí)架設(shè)被試設(shè)備時(shí)如果俯仰轉(zhuǎn)動(dòng)機(jī)構(gòu)失控翻轉(zhuǎn)將發(fā)生危險(xiǎn),為防止這種情況發(fā)生,俯仰電機(jī)采用轉(zhuǎn)軸帶抱閘機(jī)構(gòu)的伺服電機(jī),這樣在系統(tǒng)上電前轉(zhuǎn)臺(tái)俯仰電機(jī)轉(zhuǎn)軸被抱閘機(jī)構(gòu)抱死,俯仰轉(zhuǎn)動(dòng)機(jī)構(gòu)不會(huì)轉(zhuǎn)動(dòng),轉(zhuǎn)臺(tái)工作面鎖定于水平位置,保證了安全,也便于架設(shè)被試設(shè)備。在系統(tǒng)上電轉(zhuǎn)臺(tái)受控后,需要解除俯仰電機(jī)的抱閘機(jī)構(gòu),因此伺服主控解算模塊需要根據(jù)情況向俯仰電機(jī)發(fā)送解除抱閘的信號(hào)。 根據(jù)要求,轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)范圍為方位-182°~182°,俯仰-15°~45°,為確保安全,除機(jī)械限位裝置外轉(zhuǎn)臺(tái)上還設(shè)置了多組限位監(jiān)測(cè)開關(guān),轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)到設(shè)定的限位位置時(shí),相應(yīng)的限位監(jiān)測(cè)開關(guān)將被觸發(fā),伺服主控模塊實(shí)時(shí)檢測(cè)限位監(jiān)測(cè)開關(guān)的狀態(tài),當(dāng)轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)到限位位置時(shí)停止轉(zhuǎn)動(dòng),從而防止轉(zhuǎn)臺(tái)超出轉(zhuǎn)動(dòng)范圍。
伺服主控解算主要是通過安裝在顯控臺(tái)里的工控機(jī)完成的。隨著硬件技術(shù)的發(fā)展,使得計(jì)算機(jī)可以應(yīng)用在實(shí)時(shí)性要求很高的系統(tǒng)中,從而使交流伺服控制系統(tǒng)建立在一個(gè)開放、經(jīng)濟(jì)、可靠的PC平臺(tái)上成為了現(xiàn)實(shí)。本系統(tǒng)即采用“工控機(jī)+適配卡”的結(jié)構(gòu)實(shí)現(xiàn)了實(shí)時(shí)控制功能[2]。工控機(jī)主板上安裝多串口通信卡、視頻采集卡和多功能數(shù)據(jù)采集卡等板卡。伺服主控解算的作用是根據(jù)顯控模塊發(fā)送過來的控制命令完成對(duì)轉(zhuǎn)臺(tái)驅(qū)動(dòng)器的控制從而控制轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng),完成對(duì)電視觀瞄單元的變焦、聚焦、調(diào)光等控制、完成對(duì)轉(zhuǎn)臺(tái)位置信息的采集和完成對(duì)目標(biāo)圖像信息的采集。采集到的信息發(fā)送到顯控模塊進(jìn)行顯示。其中,多串口卡可以擴(kuò)展4個(gè)全雙工串口,用于完成伺服主控模塊與其他多個(gè)設(shè)備之間的串口通信,所有串口均采用RS422形式,RS422串口采用平衡發(fā)送和差動(dòng)接收,可在受干擾的線路上拾取有效信號(hào)[3],能夠滿足實(shí)時(shí)性控制要求;視頻采集卡用于將電視觀瞄單元采集到的目標(biāo)的模擬視頻信號(hào)轉(zhuǎn)換為工控機(jī)可以讀取的數(shù)字信號(hào)用于顯示;多功能數(shù)據(jù)采集卡具有16路數(shù)字量I/O接口和2路模擬量輸出接口,用于采集轉(zhuǎn)臺(tái)的角度限位信息,并向驅(qū)動(dòng)器輸出控制信息。工控機(jī)對(duì)外接口關(guān)系如圖3所示。
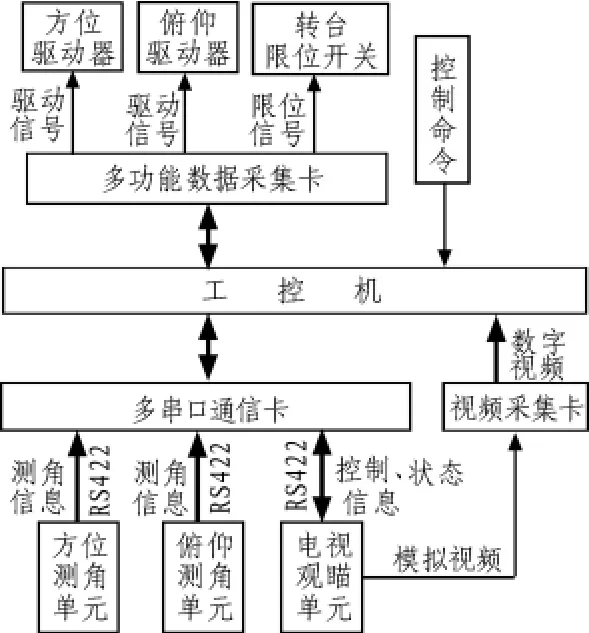
圖3 工控機(jī)對(duì)外接口關(guān)系Fig.3 External interfaces relationship of the industrial computer
方位測(cè)角單元和俯仰測(cè)角單元均采用光電編碼器。光電編碼器是一種旋轉(zhuǎn)式位置傳感器,在伺服系統(tǒng)中廣泛應(yīng)用于角位移或角速率的測(cè)量[4]。根據(jù)系統(tǒng)誤差的要求,光電編碼器的分辨率采用16位,其測(cè)角精度為:

轉(zhuǎn)臺(tái)伺服電機(jī)的技術(shù)指標(biāo)計(jì)算如下。按最大載重120 kg(被試設(shè)備最大質(zhì)量)計(jì)算,加上轉(zhuǎn)臺(tái)自身的轉(zhuǎn)動(dòng)慣量、俯仰不平衡力矩,還有風(fēng)力矩及摩擦力矩,系統(tǒng)方位和俯仰最大負(fù)載力矩分別為:
系統(tǒng)的總速比分別設(shè)計(jì)為:方位iA=305,俯仰iE=244。
由此可得轉(zhuǎn)臺(tái)方位電機(jī)和俯仰電機(jī)需要的轉(zhuǎn)動(dòng)力矩分別為[5]:
根據(jù)以上計(jì)算,轉(zhuǎn)臺(tái)方位電機(jī)采用額定轉(zhuǎn)矩為1 N·m的交流電機(jī),俯仰電機(jī)采用額定轉(zhuǎn)矩為2 N·m的伺服電機(jī)。
系統(tǒng)采用全數(shù)字交流伺服驅(qū)動(dòng)單元作為電機(jī)的驅(qū)動(dòng)器。該驅(qū)動(dòng)單元具有結(jié)構(gòu)緊湊、適配能力強(qiáng)、集成度高、功能強(qiáng)大、控制方式靈活等特點(diǎn),與轉(zhuǎn)臺(tái)伺服電機(jī)一起形成高可靠、高性能的交流伺服驅(qū)動(dòng)系統(tǒng)。
3 系統(tǒng)電源設(shè)計(jì)
系統(tǒng)中使用了較多的電源,有直流電源、交流電源、信號(hào)電源、驅(qū)動(dòng)電源,還有被試設(shè)備供電電源。其中直流電源均采用AC/DC開關(guān)電源模塊,電機(jī)驅(qū)動(dòng)電源前端設(shè)置EMI濾波器來隔離電機(jī)轉(zhuǎn)動(dòng)時(shí)產(chǎn)生的電壓擾動(dòng)。
因系統(tǒng)中使用的電源種類較多,電磁兼容設(shè)計(jì)就變得非常重要,主要采取了以下措施來解決電磁兼容問題:1)強(qiáng)電與弱電之間采用光電隔離驅(qū)動(dòng);2)信號(hào)電源或弱電電纜采用屏蔽電纜;3)數(shù)字地、模擬地等接地信號(hào)按信號(hào)電平大小分開接地、分組并聯(lián);4)顯控臺(tái)機(jī)柜采用屏蔽機(jī)殼設(shè)計(jì)[6]。
4 結(jié) 論
根據(jù)以上設(shè)計(jì),研制出了測(cè)試轉(zhuǎn)臺(tái)試驗(yàn)樣機(jī)一套。經(jīng)靶場(chǎng)測(cè)試證明,轉(zhuǎn)臺(tái)方位、俯仰轉(zhuǎn)動(dòng)機(jī)構(gòu)轉(zhuǎn)動(dòng)角度連續(xù)可調(diào),交流伺服系統(tǒng)工作穩(wěn)定可靠,光電編碼器測(cè)角精度高,系統(tǒng)電磁兼容性較好。轉(zhuǎn)臺(tái)主要技術(shù)指標(biāo)如下:負(fù)載能力為0~120 kg,角度定位誤差:方位 0.15 mrad(r.m.s),俯仰 0.32 mrad(r.m.s)。該測(cè)試轉(zhuǎn)臺(tái)的研制對(duì)其它同類設(shè)備的設(shè)計(jì)制造提供了經(jīng)驗(yàn)和依據(jù)。
[1]張銳,白連平.永磁交流伺服電機(jī)控制系統(tǒng)的研究[J].電氣技術(shù),2011(3):6-7.
ZHANG Rui,BAI Lian-ping.Research on permanent magnet AC servo motor control system [J].Electrical Engineering,2011(3):6-7.
[2]張旭東.基于PC機(jī)的開放式交流伺服系統(tǒng)的研究[J].控制工程,2007,14(1):96-97.
ZHANG Xu-dong.Research on open architecture AC servo system based on industrial control computer[J].Control Engineering of China,2007,14(1):96-97.
[3]唐軍軍,樊銳.RS422串行通信在轉(zhuǎn)臺(tái)實(shí)時(shí)控制中的應(yīng)用[J].裝備制造技術(shù),2007(11):43.
TANG Jun-jun,F(xiàn)AN Rui.Application of RS422 in real-time control of turntable[J].Equipment Manufacturing Technology,2007(11):43.
[4]姜義.光電編碼器的原理與應(yīng)用 [J].傳感器世界,2010(2):16-18.
JIANG Yi.Principle and application ofphotoelectrical encoders[J].Sensor World,2010(2):16-18.
[5]肖萬選,申余才.雷達(dá)天線轉(zhuǎn)臺(tái)負(fù)載力矩的確定[J].電子機(jī)械工程,2007,23(3):43-46.
XIAO Wan-xuan,SHEN Yu-cai.The determination of Load moment on radar’s antenna pedestal[J].Electro-Mechanical Engineering,2007,23(3):44-46.
[6]楊繼深.電磁兼容技術(shù)之產(chǎn)品研發(fā)與認(rèn)證[M].北京:電子工業(yè)出版社,2007.
[7]封錫凱,李偉,李輝.電磁閥啟閉特性非接觸測(cè)量方法研究[J].火箭推進(jìn),2011(3):65-67.
FENG Xi-kai,LI Wei,LI Hui.Study on non-contact measurement techniques of solenoid valve response characteristics[J].Journal of Rocket Propulsion,2011(3):65-67.
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00