CPLD和MSP430單片機在導波雷達物位計中的應用
2012-09-26 02:27:56張龍浩祝懷標
電子設計工程 2012年21期
張龍浩,祝懷標,譙 艷
(華中科技大學 控制科學與工程系,湖北 武漢 430074)
導波雷達物位計具有受溫度、壓力、霧氣、泡沫及被測介質物理特性變化的影響較小的優點。而且其測量精確,性能穩定,在石化、電力、冶金、等領域得到了廣泛的應用,是近年來發展最快的一種物位測量技術。目前已有的導波雷達物位計多是國外進口產品且價格較高,低成本的導波雷達物位計有很大的市場前景。
1 雷達導波物位計的測量原理
導波雷達是非接觸式雷達和導波天線結合的產物。它運用了TDR(時域反射)的原理。
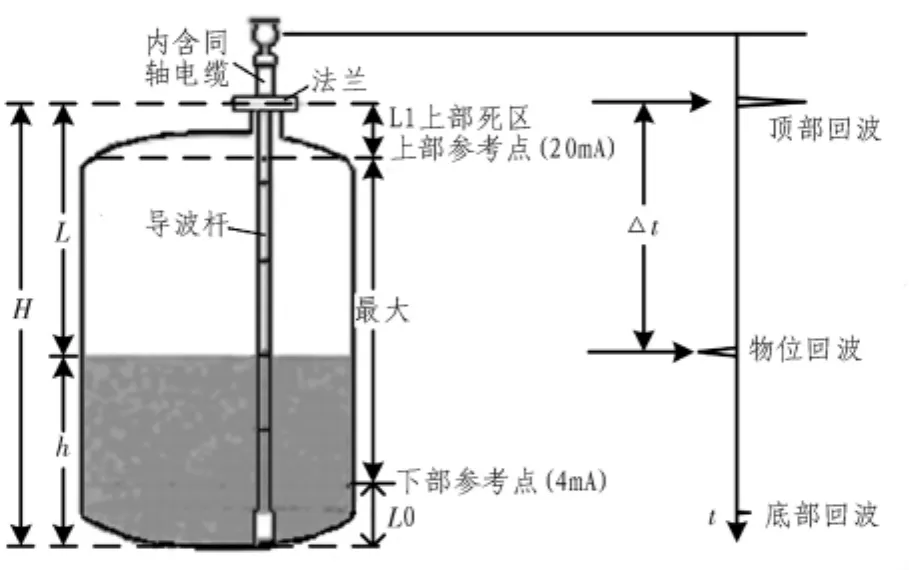
圖1 導波雷達物位計的測量原理Fig.1 Measurement principle of guided wave radar level meter
圖1是導波雷達物位計的測量原理,電磁波發射模塊發射窄脈沖信號進入同軸電纜,信號傳播到同軸電纜和導波桿的連接處(法蘭處)會首先發生斷路,一部分信號會反射產生一個頂部回波,其余信號繼續沿導波桿傳播。當信號與被測液體表面接觸時,其阻抗特性會發生變化,一部分信號也會被反射,產生物位回波,此后信號在導波桿的底部斷路處還會產生一個能量較小的底部回波。根據傳輸線理論,頂部回波和底部回波是斷路產生的,所以與發射信號同相。一般下層介質的介電常數大于上層介質,特性阻抗小于上層,因此物位回波與發射信號反相。
導波雷達物位計通過測量物位回波和頂部回波之間的時間差計算物位高度,物位計的法蘭處到被測介質表面的距離L與脈沖在桿上的傳播時間Δt成正比。設c為光速。罐體高度為H,則物位高度h和Δt有如下關系:

實際上量程的上部和下部都會存在一個非線性特性的測量死區,其長度分別為L0和L1。實際物位h的可靠測量的范圍為L0到H-L1。物位為L0時對應的物位計模擬信號輸出為4 mA,物位為H-L1時輸出為20 mA。
2 雷達導波物位計系統整體方案設計
導波雷達物位計由機械部分,信號收發模塊,信號處理模塊3個模塊構成。信號收發模塊和信號處理模塊兩部分的電路設計采用了CPLD和MSP430單片機協同工作的電路設計方案,其中CPLD為信號收發模塊的控制核心,MSP430單片為信號處理模塊的控制核心。導波雷達物位計的系統框圖如圖2所示。
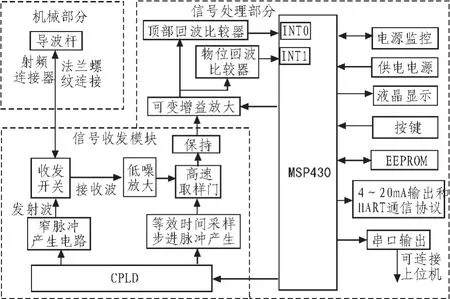
圖2 導波雷達物位計系統框圖Fig.2 System diagram of guided wave radar level meter
3 CPLD為核心的信號收發模塊的設計
雷達信號收發模塊由可編程邏輯器件CPLD為核心,下面介紹收發模塊的工作過程。
CPLD在收到單片機發出測量啟動信號后,開始產生2 M的觸發方波,觸發方波被微分電路微分整形后進入窄脈沖產生電路觸發雪崩三極管,產生脈寬約為1~2 ns左右的窄脈沖。脈沖波在法蘭處的同軸電纜與導波體的連接處產生頂部回波,在物料界面處產生物位回波。
與此同時,CPLD控制延時芯片AD9500產生2 M觸發方波的步進延時方波,方波被微分整形后,產生控制等效時間采樣的取樣脈沖。取樣脈沖整形為正負取樣脈沖后,控制高速四管平衡取樣門的導通與截止,實現等時間采樣。回波信號經過收發開關進入超低噪聲精密高速運放LT1128放大后送入取樣門,經等效時間采樣和保持后,送入信號處理部分。
3.1 CPLD在發射模塊中的應用
如果導波雷達物位計發射脈沖信號的脈寬過寬,將會導致系統的分辨率降低和測量死區的增加。為此需要產生寬度窄、幅度大和重復頻率高且波形好的發射脈沖信號。脈沖產生方式主要有氣體放電、雪崩三極管和階躍二極管等,其中用的較多的是雪崩三極管,產生的脈寬可達1~2 ns。
CPLD在發射模塊中的主要作用是產生2M的觸發方波,該方波經微分整形產生2 MHz周期觸發脈沖,處理后可以推動雪崩三極管迅速進入雪崩狀態,從而得到需要的周期為2 M寬度為1~2 ns的窄脈沖信號。CPLD產生的方波具有波形好,寬度、頻率通過編程可調等特點,很適合本系統。
3.2 CPLD在接收模塊中的應用
由于系統采用的窄脈沖信號在空間中傳播的速度接近光速,在測量的過程中,窄脈沖信號的行程時間僅為納秒量級,如果直接測時間差,為了達到需要的物位精度,測時精度要達到皮秒數量級。如果用數字計數法和實時采樣法等傳統時間測量方式很難滿足要求。
等效時間采樣是指對于頻率很高的周期性或準周期性被采樣信號,可以用較慢的采樣頻率捕獲被采樣信號的樣本值,然后按照一定的規律重新組合,得到與原信號相似的波形,從而實現利用較低的實時采樣速率獲取較高的等效采樣速率。使用該方法,可以實現窄脈沖在時間軸上的精確放大,對后續電路的要求大大降低。其原理框圖如圖3所示。由于導波雷達物位計的回波信號為準周期性重復信號,因此可用等效時間采樣法來實現導波雷達物位計的回波信號的時間間隔檢測。
圖3是等效時間采樣的原理圖。
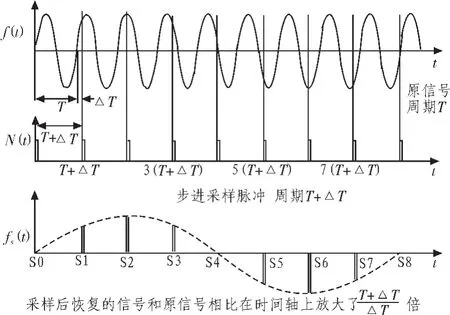
圖3 等效時間采樣原理圖Fig.3 Principle of equivalent time sampling
由等效采樣的原理可以知道,采樣信號的重復周期與采樣脈沖周期之間的差值Δt越小,采樣的精度就越高。所以產生具有穩定和高精度步進值的采樣脈沖信號是關鍵。這里選擇AD公司的8位數字可編程延時器件AD9500,它采用高性能雙極型工藝,專為高速電路設計。AD9500的滿程編程延時為 2.5 ns~10 μs(由外接電阻電容決定),最小延時分辨率更是可達10 ps。只需要提供外部觸發信號、鎖存信號以及控制步進延時的數字控制字,AD9500就能產生相對于觸發信號具有步進延時的脈沖信號。
回波脈沖的頻率為2 M,周期為 500 ns,取Δt=20 ps,為了把一個周期內的信號采樣完整,必須一個周期內實現范圍為Δt~25 000Δt的延時。而AD9500是八位延時芯片只能產生Δt~256Δt的延時,因此需要采用兩片AD9500級連的方式進行擴展,使數字控制位數擴展到16位。圖4是CPLD和AD9500的連接示意圖,兩片AD9500一片產生大延時 ,一片產生小延時,兩者的數字控制位數是高8位和低8位的關系。
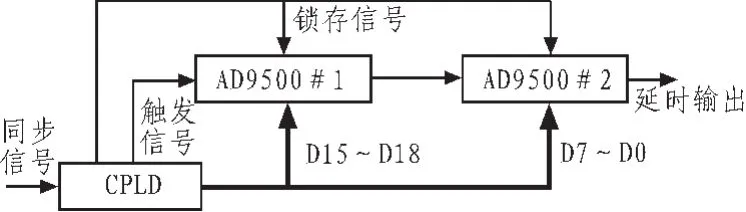
圖4 CPLD和AD9500的連接示意圖Fig.4 Connection diagram of CPLD and AD9500
AD9500對控制信號時序的要求較高,使用CPLD可以對AD9500進行較精確的時序控制。CPLD提供AD9500的觸發信號、鎖存信號以及延時控制字。每完成一次觸發延時后,送入CPLD的延時控制字就加1,然后送鎖存信號使控制字鎖存至AD9500內部,等待下次觸發到來。要注意保證鎖存信號與觸發信號同頻率,且必須在觸發信號產生后產生。
4 MSP單片機為核心的信號處理模塊設計
TI公司的MSP430單片機作為一種低功耗的16位單片機,在智能儀表中應用廣泛。這里選用MSP430F149單片機作為信號處理模塊的控制核心。下面分模塊介紹信號處理模塊的電路和軟件設計。
4.1 物位測量模塊電路設計
導波雷達物位計在進行物位測量時,收發電路發射的脈沖信號的幅值是一個固定值。而從介質液面反射的回波信號的幅值大小會受介質的介電常數、導波桿桿長等很多因素的影響。因此反射得到的回波信號的幅值會有大有小。在不同的使用工況下,需要把回波信號進行放大處理,便于后續的比較電路進行處理。這里選用低噪聲可變增益放大器AD604,它的增益由VGE引腳的輸入電壓確定。單片機控制八位高速DAC TVL7524控制VGE引腳的輸入電壓,從而控制AD604的增益。
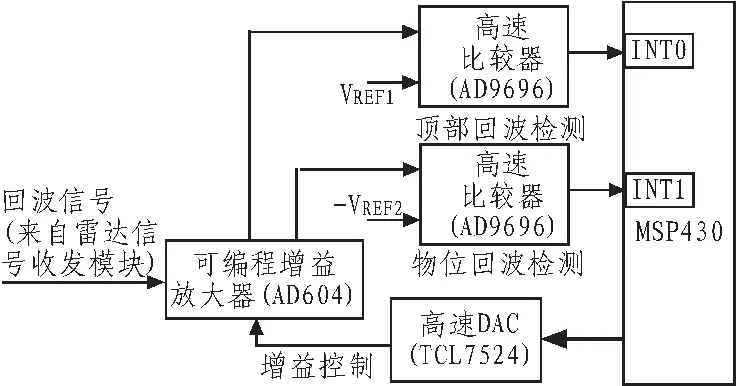
圖5 物位測量模塊電路框圖Fig.5 Circuit diagram of level measurement
圖5是物位測量模塊的電路框圖。在雷達信號收發模塊中,回波信號經過等效時間采樣和保持,已經變為較低頻率的信號,信號在進入可變增益放大器放大后分為兩路,分別進入頂部回波比較器和物位回波比較器(反相比較),比較器芯片選用超高速比較器AD9696。比較產生的脈沖進入MSP430單片機的不同引腳,單片機的內部計時器計算兩者之間的時差,并根據其他參數計算時差對應的物位值,多次計算后進行數字濾波得到一個穩定的物位值。
4.2 電源電路設計
系統中要用到多種電源,這里選擇AD421作為電源轉換芯片。AD421是一個16位4~20 mA電流輸出DAC。同時當外部電源給AD421提供+24 V的電壓時,AD421芯片有3個輸出引腳可分別輸出+5 V、+1.25 V、+2.5 V的電壓,所以它同時是一個智能儀表中常用的電源轉換芯片。
MSP430的工作電壓范圍為+1.8~+3.6 V,采用低功耗電壓調整器HT7133把AD421輸出的+5 V電壓轉換為+3.3 V。電路中還要用到到負電源,采用負電源轉換芯片TP7660把+1.2~+8 V的電壓轉換成相應的-1.2~-8 V輸出。
4.3 通信電路設計
單片機的3個IO口和AD421通過同步串行接口相連,實現物位計4~20 mA輸出的功能。單片機物位信息經過計算,轉化為相應的電流值對應的數字量傳給AD421,AD421會輸出對應的4~20 mA電流。
物位信息還可通過MSP430單片機內部集成的通用串行輸出,串口可連接上位機軟件實現物位趨勢圖顯示等功能。
此外系統還可擴展HART總線傳輸液位信息,HART總線是一種兼容4~20 mA信號的通信總線,在智能儀表行業中使用廣泛。HART通信協議采用在4~20 mA模擬信號上疊加0.5 mA的FSK(頻移鍵控)信號進行通信,由于FSK信號平均值為零,所以不會對模擬信號產生影響,這里采用低功耗芯片HT20C12和單片機的串口相連來實現HART信號的調制和解調。圖6是系統通信部分的電路框圖

圖6 通信部分電路框圖Fig.6 Circuit diagram of communication part
4.4 人機接口電路設計
導波雷達物位計作為一臺智能儀表,需要有良好的人機接口,從而實現顯示物位信息和查看修改參數的功能。顯示部分選用了性價比較高的5110液晶模塊,它是84×48的點陣 LCD,可顯示兩行漢字。導波雷達物位計需要對系統參數進行設定,共設計了6個按鍵,分別代表左、右、改數字、確定、取消和復位。過這些按鍵配合LCD顯示能夠方便的完成各參數的設定。
4.5 MSP430單片機的軟件設計
MSP430單片機的軟件設計在IAR EW for MSP430編程環境下進行。程序設計中充分考慮到了儀表的低功耗和高穩定性的要求。圖7為單片機的主程序流程圖和程序中液位測量部分的流程圖。
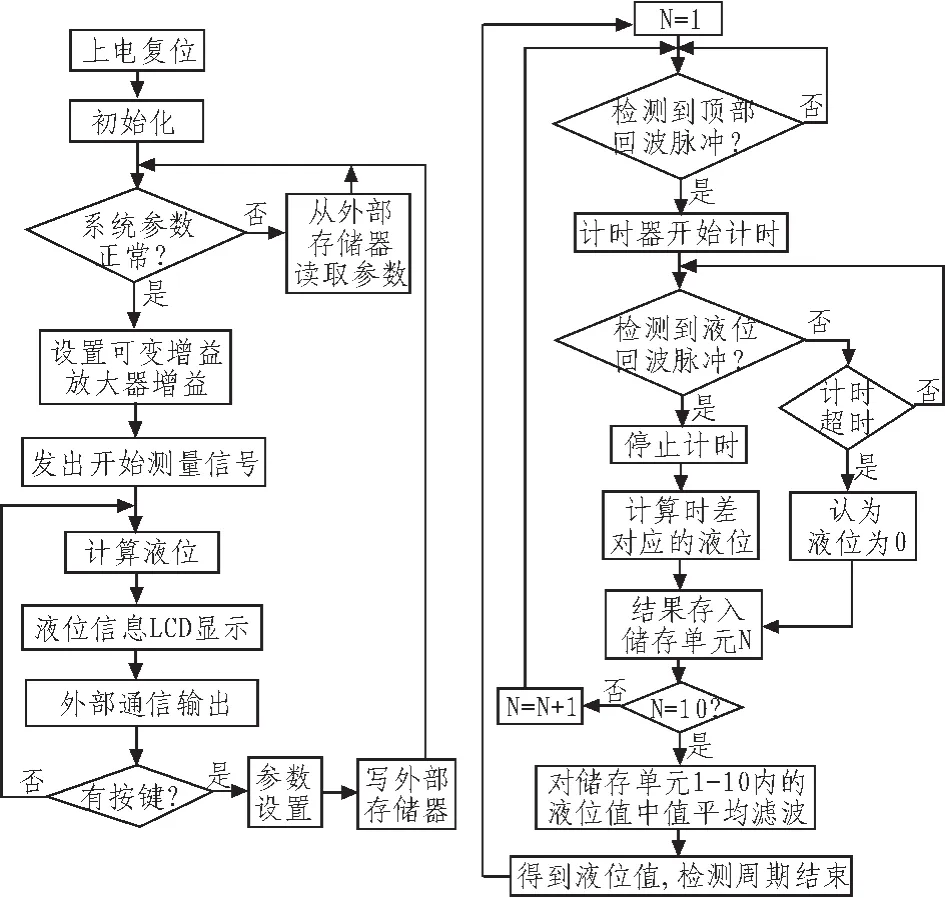
圖7 單片機主程序流程圖(左)和液位測量程序流程圖(右)Fig.7 Main program flow chart of MCU(left) and the program flow chart of level measurement(right)
5 系統測試試驗
為了驗證上述電路設計的可行性,我們對電路進行了制板,并把儀表廠家提供的機械部分和我們的電路部分相連進行了初步的驗證試驗。試驗在常溫下的實驗室環境下進行,被測液體為水(介電常數約為81.5)。
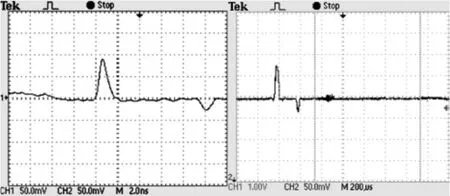
圖8 回波脈沖和等效時間采樣后的回波脈沖Fig.8 Echo pulse and echo pulse after equivalent time sampling
圖左邊中在電路板與同軸電纜SMA接頭處測得回波脈沖,圖中可以清楚的看到頂部回波和物位回波的波峰。兩者的脈寬都約為2 ns,波峰之間的時間差為8.3 ns。考慮到示波器的誤差,8.3 ns的時間差對應的法蘭到液位表面的距離應為1.245±0.15 m和實測的1.26 m相符。 右邊為等效時間采樣后的回波脈沖,兩者波峰之間的時間間隔約為215 μs,在時間軸上放大了2.59×105倍和理論值2.5×105倍相符,這說明等效時間采樣實現了高頻信號在時間軸上的放大。當MSP430單片機設置罐高為6 m時,液晶顯示的液位高在4.730~4.746 m之間,和理論值的4.74 m誤差小于0.01 m。
6 結 論
導波雷達物位計采用了CPLD加MSP430的電路設計方案。因為信號收發部分屬于高速電路,對波形時序的要求較高,所以選用了可編程邏輯器件CPLD。而信號處理部分的計算任務較重,因此選用了處理能力較強的MSP430單片機。兩者協同工作優勢互補,實現了高精度的時差測量系統,和其他方案相比有較高的性價比和可靠性,實現了較高的測量精度。
[1]榮犇,周漢義,劉紅櫻.基于MSP430自動脹管控制器的研制[J].電子設計工程,2010,18(7):125-127.
RONG Ben,ZHOU Han-yi,LIU Hong-ying.Development of automatic electric tube based on MSP430[J].Electronic Design Engineering,2010,18(7):125-127.
[2]屈義萍.沖擊脈沖探地雷達發射與接收電路的設計[D].沈陽:沈陽航空工業學院,2010.
[3]劉偉佳.導波雷達液位計信號處理模塊設計[D].成都:電子科技大學,2010.
[4]張寶東,王省書,戰德軍,等.基于AD9501串聯的順序等效時間采樣設計[J].電子測量技術,2008,31(17):66-67.
ZANG Bao-dong,WANG Sheng-shu,ZHAN De-jun,et al.Design of sequential equivalent time sampling based on double AD9501 in series[J]. Electronic Measurement Technology,2008,31(17):66-67.
[5]周維,王赤,田茂,等.基于等效時間采樣的探地雷達回波信號采樣方法研究[J].雷達科學與技術,2004,2(1):44-47.
ZHOU Wei,WANG Chi,TIAN Mao,et al.Research on a sample-collecting method of echo data of ground penetrating radar based on equivalent time sampling[J].Radar Science and Technology,2004,2(1):44-47.
[6]吳曉宇,裴東興,王成帥,等.基于MSP430的石油井下壓力測試系統的設計[J].電子設計工程,2009,17(9):109-110,113.
WU Xiao-yu,PEIDong-xing,WANG Cheng-shuai,etal.Design of oil-well pressure measurement system based on MSP430 MCU[J].Electronic Design Engineering,2009,17(9):109-110,113.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
