激光跟蹤儀在攝像機標定中的應用**1
2012-09-26 09:32:12陳杰春趙麗萍
制造技術與機床 2012年9期
關鍵詞:測量
陳杰春 張 恒 趙麗萍
(①東北電力大學自動化工程學院,吉林吉林 132012;②東北電力大學理學院,吉林吉林 132012)
由于立體視覺測量技術具有成本低、效率高和系統(tǒng)組成靈活等特點,因此它在幾何量測量、在線檢測和反求工程等方面得到了廣泛的應用。攝像機標定是實現(xiàn)立體視覺測量技術的關鍵,其標定結果的準確程度直接決定了視覺測量結果的準確程度。現(xiàn)有的攝像機標定方法主要有兩種:傳統(tǒng)標定方法和自標定方法。相比較而言,傳統(tǒng)標定方法可以獲得較高的精度[1]。在使用傳統(tǒng)標定方法時,通常在攝像機的視場中放置一個標定設備,而且在標定設備的表面,往往要人為印制特定的圖案(如棋盤格圖案)。在標定過程中,首先使用三坐標測量機精確測量出標定設備表面上的每個控制點的三維世界坐標,然后用攝像機拍攝標定設備的圖像,并使用某種圖像特征檢測算子提取每個控制點成像的二維圖像坐標,最后再利用這些控制點的三維世界坐標和二維圖像坐標求解攝像機模型公式中的未知參數(shù)[1-3]。
在攝像機視場較大的情況下,如何制作標定設備以及如何精確測量控制點的三維坐標,是應用傳統(tǒng)標定法標定攝像機的關鍵問題。激光跟蹤儀是一種便攜式的三坐標測量機。與傳統(tǒng)的三坐標測量機相比,激光跟蹤儀具有以下特點:(1)既能實現(xiàn)動態(tài)測量也能實現(xiàn)靜態(tài)測量;(2)具有較大的測量范圍;(3)可獲得較高的測量精度[4-5]。比如FARO公司生產(chǎn)的Laser Tracker Xi激光跟蹤儀,其最大測量半徑為35 m、三坐標的測量精度可達0.025 mm。由于激光跟蹤儀具有以上特點,因此文中將探討使用激光跟蹤儀標定攝像機的方法,該方法試圖解決2個問題:(1)如何使用激光跟蹤儀生成控制點;(2)如何使用激光跟蹤儀測量控制點的三維坐標。
1 激光跟蹤儀的工作原理
圖1給出了典型激光跟蹤儀的原理示意圖[6-7]。如圖1所示,激光器發(fā)出的光束首先由分束鏡1分成兩部分:一部分射向角錐反射棱鏡3形成參考光束;另一部分射向光束導向平面鏡4形成測量光束。在兩臺裝有高精度光電碼盤的電動機的驅動下,光束導向平面鏡可分別繞水平軸和垂直軸旋轉。測量光束入射到光束導向平面鏡的回轉中心,經(jīng)反射后射向位于被測點的靶標。靶標通常采用貓眼或角錐棱鏡的結構形式,這兩種靶標都可以使入射到靶標中心的光束沿原路返回,未入射到靶標中心的光束則平行返回。若測量光束沿原路返回,它將與參考光束匯合并生成亮暗相間的干涉條紋,由光電計數(shù)器5累計亮暗條紋變化的次數(shù),可測量出靶標的相對位移量。如果測量光束未能沿著原路返回,它就不能與參考光束匯合,進而不能測量出靶標的相對位移量。為了保證測量光束沿著原路返回,用分束鏡2從返回的測量光束中分一部分光束,并讓它射向二維位置敏感探測器6的感光面。二維位置敏感探測器能夠檢測出返回的測量光束與原測量光束之間的偏差量,伺服控制器根據(jù)此偏差量的大小輸出相應的控制信號給電動機7和8,電動機7和8帶動光束導向平面鏡同時繞水平軸和垂直軸旋轉,直至測量光束入射到靶標中心并沿著原路返回。上述調節(jié)過程,也能保證激光跟蹤儀實時跟蹤靶標的位置變化,使測量光束始終入射到靶標的中心。
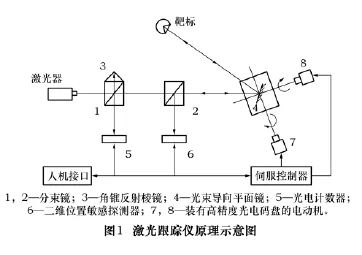
在跟蹤靶標過程中,激光跟蹤儀也實時測量靶標中心的三維坐標。激光跟蹤儀是一個球坐標測量系統(tǒng),其坐標系原點與光束導向平面鏡的回轉中心相固連。假設點P是靶標中心點,點P至坐標原點的距離L由干涉系統(tǒng)測量,點P的方位角α和俯仰角β由高精度光電碼盤測量。由于干涉系統(tǒng)和光電碼盤均為增量碼測量系統(tǒng),因此測量前必須預設L、α和β的初值。通常在激光跟蹤儀的殼體上設置一個初始點,測量開始時,首先將靶標置于該初始點上,該點與光束導向平面鏡回轉中心的距離和方位角是固定且已知的,然后在此基礎上分別測量L、α和β的絕對值。點P的極坐標(L,α,β)和直角坐標(x,y,z)可相互轉換[8]:
2 控制點的生成及其坐標的測量
2.1 控制點的生成過程
如圖2所示,用激光跟蹤儀生成控制點的過程為:
(1)在激光跟蹤儀的測量范圍內安放1個表面平整的標定板,然后將靶標放在標定板的表面上,同時記錄靶標中心點的三維坐標(X,Y,Z)。
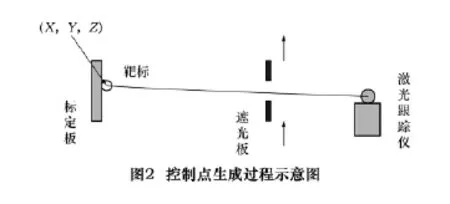
(2)在測量光束的光路上放置1個不透光的遮光板。根據(jù)激光跟蹤儀的工作原理可知,此時激光跟蹤儀的跟蹤系統(tǒng)將失去作用,也就是說,若此時移動靶標,測量光束不會跟著改變方向。
(3)將靶標從標定板的表面上拿走,接著再移開遮光板。這樣,激光跟蹤儀的測量光束就會直接投射在標定板的表面上并形成一個指示光斑,此指示光斑就被用作標定攝像機的控制點。
2.2 標定板平面方程的確定
將靶標隨機放在標定板的表面上,同時記錄靶標中心點的三維直角坐標 Pi(xi,yi,zi)(i=1,2,…,n;n>3)。靶標中心點Pi分布在同一平面內,該平面與標定板平面互相平行,而且兩者之間距離等于靶標半徑R。
假設:標定板平面為Πb;靶標中心點所在的平面為Πc;平面Πc的方程為

將點Pi(i=1,2,…,n;n>3)的坐標值代入式(2),可構造一個超定線性方程組:
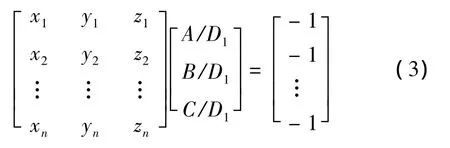
使用最小二乘法求解式(3),可以確定 A/D1、B/D1和C/D1的數(shù)值。
平面Πb和Πc的相對位置關系如圖3所示,假設點Pc(xc,yc,zc)是平面 Πc內的任意一點,直線l過點Pc而且垂直于平面Πc,則直線l的參數(shù)方程可寫成:
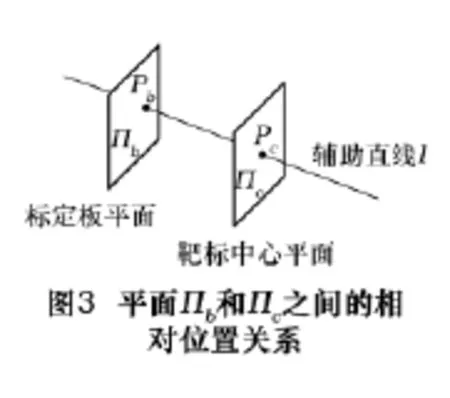
點 Pb(xb,yb,zb)是直線 l和平面 Πb的交點,由于平面Πb和Πc之間的距離等于靶標半徑R,由式(4)可求得點Pb的坐標為
由于平面Πb和Πc互相平行,因此可假設平面Πb的方程為

將點Pb的坐標值代入式(6)得:

至此,確定了標定板平面方程式(6)中的所有未知參數(shù)值,即確定了標定板平面的平面方程。
2.3 控制點坐標的確定
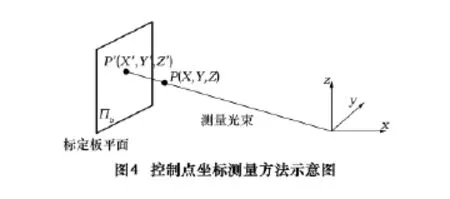
標定板平面和激光跟蹤儀測量光束之間的關系如圖4所示,將測量光束看作一條經(jīng)過坐標原點的直線,則靶標中心點P是該直線上的一點,直線OP的參數(shù)方程為:
式中X、Y和Z是點P的坐標分量。
結合式(6)和(8),得標定板平面Πb和直線OP的交點P′(即控制點)的坐標為
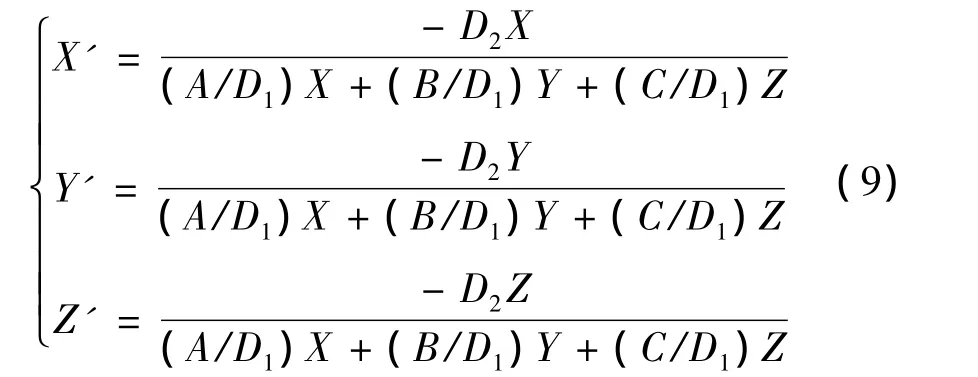
由于在生成控制點的過程中已測量出點P的三維世界坐標(X,Y,Z),因此由式(9)可求解出控制點P′的三維世界坐標(X′,Y′,Z′)。
3 實驗結果
通過實驗對文中提出的方法做了驗證。使用FARO公司的Laser Tracker Xi激光跟蹤儀在空間中生成15個控制點,同時測量出這些控制點的三維世界坐標(xi,yi,zi)。用攝像機拍攝每個控制點的圖像,然后在圖像中識別出控制點并計算其質心坐標(ui,vi)。表1給出了這些控制點的三維世界坐標及其成像點的二維圖像坐標。
采用Tsai攝像機模型公式描述攝像機的成像過程。Tsai攝像機模型是一種被廣泛采用的非線性攝像機模型,因為它不但能滿足多數(shù)應用的精度要求,而且表達式也比較簡單。實驗中采用兩步法求解Tsai攝像機模型公式中的未知參數(shù),即首先根據(jù)攝像機成像過程的特點確定攝像機模型參數(shù)的初值,然后再利用最小二乘法確定模型參數(shù)的最優(yōu)解[3]。使用表1中的數(shù)據(jù)求解Tsai攝像機模型公式中的未知參數(shù),其結果如表2所示。
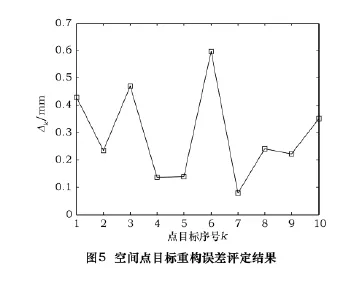
為了驗證攝像機標定結果的準確性,首先使用2.1節(jié)中給出的方法生成10個指示光斑,同時測量出它們的三維世界坐標(xk,yk,zk)(k=1,2,…,10)。接著使用標定過的Tsai攝像機模型公式重構這些點目
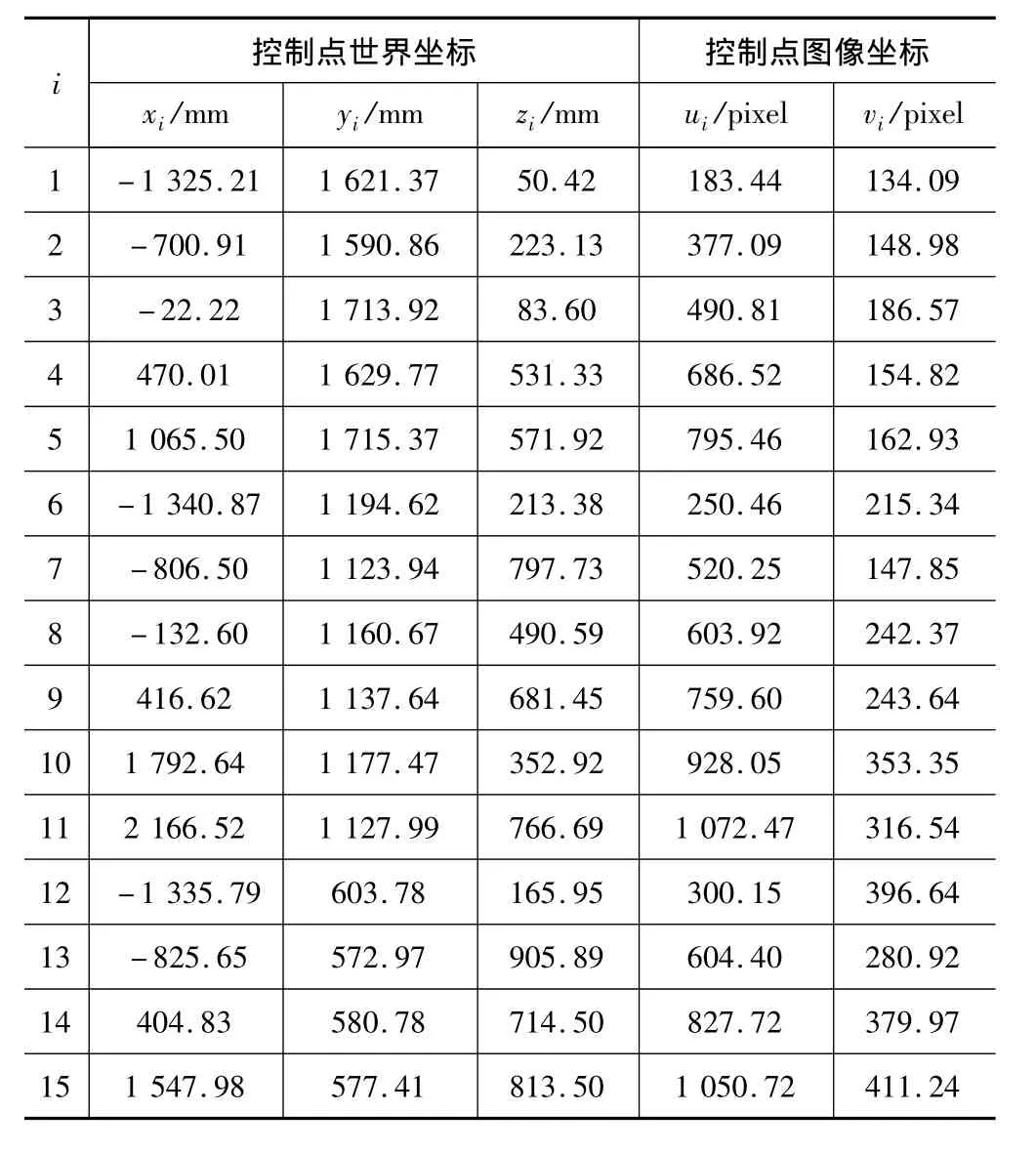
表1 標定攝像機模型的數(shù)據(jù)
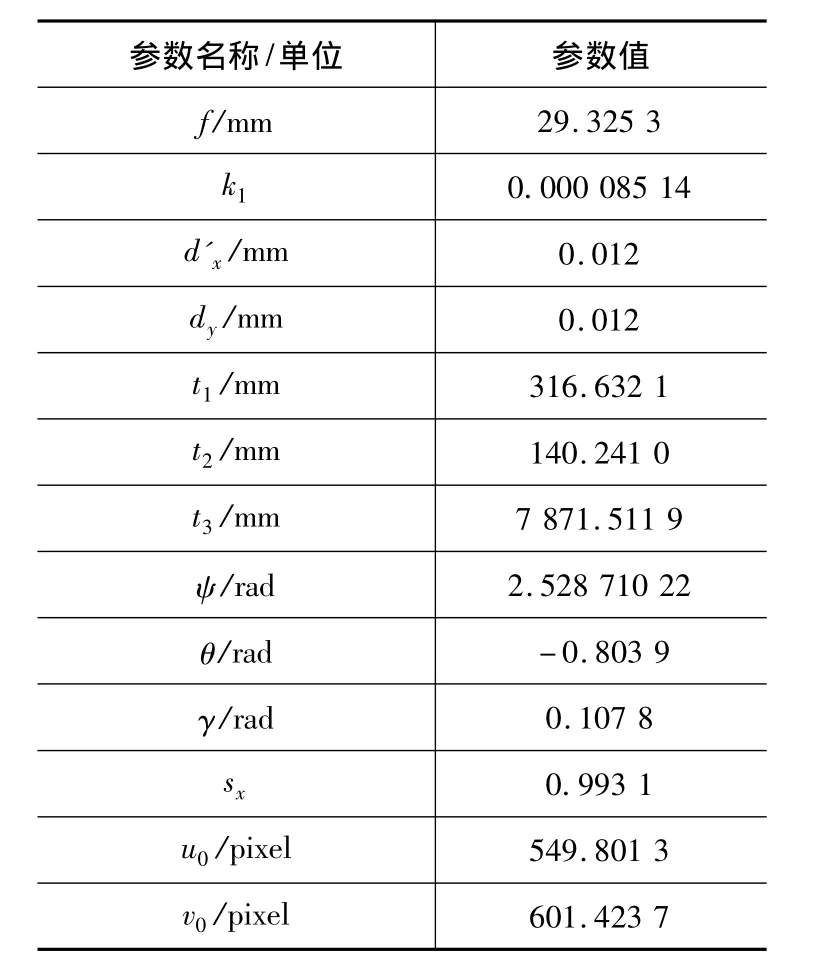
表2 攝像機標定結果

4 結語
文中探討了使用激光跟蹤儀標定攝像機的方法,該方法主要解決了2個問題:如何生成控制點;如何準確測量這些控制點的三維坐標。通過實驗對該方法做了驗證,實驗中生成的控制點分布范圍較大,由實驗結果可見,該方法適合用于標定視場范圍較大的攝像機,并且能夠取得令人滿意的測量精度。
[1]David Forcyth,Jean Ponce.計算機視覺:一種現(xiàn)代的方法[M].北京:清華大學出版社,2005.
[2]Salvi J,Armangué X,Batlle J.A comparative review of camera calibrating methods with accuracy evaluation[J].Pattern Recognition,2002,35(7):1617-1635.
[3]Tsai R Y.Versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation,1987,RA -3(4):323-344.
[4]郭潔瑛,劉笑,王偉.激光跟蹤儀水平與垂直角對測量精度影響的試驗研究[J].航天器環(huán)境工程,2010,27(5):643-646.
[5]王衛(wèi)軍,李曉星,方程,等.激光跟蹤儀在風機葉片外形測量中的應用[J].航天制造技術,2009(6):26-29.
[6]Greef G P.A study for the development of a laser tracking system utilizing multilateration for high accuracy dimensional metrology[D].Stellenbosch:University of Stellenbosch,2010.
[7]Gallagher B B.Optical shop applications for laser tracker metrology systems[D].Arizona:University of Arizona,2003.
[8]張春富,張軍,唐文彥,等.激光跟蹤儀在大尺寸工件幾何參數(shù)測量中的應用[J].工具技術,2002,36(5):26 -28.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
