視覺測量中多光學靶點亮度自適應控制※*
2012-09-25 03:00:08李鐵林張麗艷楊博文葉南
單片機與嵌入式系統應用 2012年4期
李鐵林,張麗艷,楊博文,葉南
(南京航空航天大學 機電學院,南京 210016)
引 言
紅外LED發光亮度控制的基本原理是通過控制流過紅外LED的平均電流大小來實現,圖1所示為發光強度與平均電流的對應關系曲線。ENRI是紅外LED歸一化發光強度,IF是平均電流,圖中實線部分表示持續電流,虛線表示脈沖電流。目前,在視覺測量領域,作為光學靶點的紅外LED發光亮度調節方式主要可分為兩類。
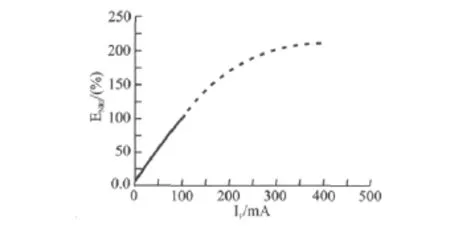
圖1 發光強度與平均電流的對應關系曲線
一類是利用A/D轉換芯片改變驅動電壓的方式調節流過紅外LED電流的大小,該方法具有線性好的優點,但是由于流過LED電流為持續電流,由圖1可見不允許超過100mA,遠距離測量時紅外LED發光亮度不足。同時,單片機通過串口控制一塊A/D轉換芯片,一塊芯片只能控制一個紅外LED,較難實現同時控制多個紅外LED的要求。
另一類是采用多路LED驅動芯片通過PWM(Pulse Width Modulation)方式調節流過紅外LED的平均電流大小,使用PWM方式獨立地調節每一個紅外LED的發光亮度,該方式下紅外LED的驅動電壓恒定,所以LED導通時的電流是一個定值,本文中稱作“原始電流”I。
采用高頻的脈沖信號控制LED的導通和關斷,通過脈沖脈寬調制的方法調節導通和關斷時間的比例來實現平均電流大小調節,該方法的優點是可同時實現控制多路紅外LED的發光亮度、調節精度高,但是受LED驅動芯片負載電流能力的限制,通過每個紅外LED的極限電流值為50mA。
1 控制系統的組成以及工作方式
整個光學靶點亮度自適應控制系統包括計算機、通信電路(包括主副兩個模塊)、光學靶點控制驅動電路3個部分,可工作于有線、無線兩種工作模式,控制系統結構框圖如圖2所示。控制系統的工作可描述為如下4個過程:
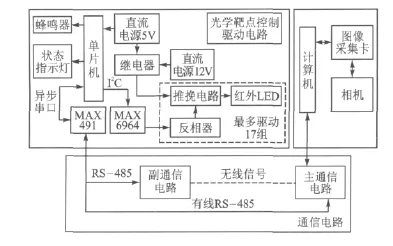
圖2 控制系統結構框圖
①計算機對采集到的圖像進行分析,如果成像光斑不滿足要求,發光亮度調節函數根據紅外LED的成像分析結果并計算出發光亮度調節參數,發光亮度調節參數寫入MAX6964后可以調節各路輸出PWM信號占空比,作用到下一次拍攝時紅外LED的發光亮度控制。
②計算機通過自身串口RS-232將控制信息傳送到主通信電路,控制信息包括硬件電路狀態檢測、錯誤報警、單個紅外LED閃爍、測量(控制信息中包含該次測量時紅外LED的發光亮度調節參數)。主通信電路根據工作模式將信號轉換,在有線模式下將信號轉換為抗干擾能力強、傳輸距離遠的RS-485差分信號,通過雙絞線傳送到紅外LED控制驅動電路;無線模式下則將信號轉換為無線載波,副通信電路接收無線載波后轉換為RS-485差分信號,并通過雙絞線傳送到紅外LED控制驅動電路。
③單片機接收到控制信息后進行判斷、決策,執行相應的動作,如果是測量命令,則需要驅動紅外LED,一方面判斷是否需要使用繼電器對“原始電流”I的大小進行切換,需要則進行切換,反之則保持原電流大小。另一方面,控制多路LED驅動芯片MAX6964按照要求輸出多路由發光亮度參數重新確定了占空比大小的脈沖波形,對各個紅外LED的發光亮度進行調節。
④單片機在執行命令中或者執行完命令后,反饋給計算機命令執行信號。每一條控制信息執行后都要反饋執行信號給計算機,使計算機始終掌握紅外LED驅動控制電路的工作狀態以及是否正確執行該命令,測量命令反饋的執行信息同時是計算機圖像采集的觸發信號。
在設計制作集成電路時,將控制驅動電路、主通信電路、副通信電路分別設計成3塊彼此獨立的集成電路。現階段每塊控制驅動電路設計驅動8個紅外LED,根據RS-485通信網絡組成方式,可以使用多個控制驅動電路組成控制驅動網絡,RS-485通信網絡圖如圖3所示,從而實現一臺主機同時控制多數目的紅外LED工作。
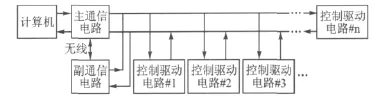
圖3 RS-485通信網絡圖
2 關鍵電路工作原理以及電路設計
2.1 紅外LED驅動電路工作原理
紅外LED驅動電路基本原理圖如圖4所示。驅動電路由一對三極管構成的推挽電路來直接驅動紅外LED,由PWM信號控制紅外LED導通、關斷,達到調節平均電流大小的目的。工作時,A點為高電平時,Q1導通、Q2截止,紅外LED通過正向電流I,即“原始電流”;A點低電平時,Q1截止、Q2導通,紅外LED關斷。三極管Q1型號選用S8050,輸出電流最高可達500mA,完全滿足驅動紅外LED電流大小的要求。
三極管Q1工作在飽和狀態,三極管導通時產生飽和壓降vCE(sat),紅外LED導通時產生正向壓降vF,導通時供電線路也會產生線路耗損壓降vL(vL一般很小,可以忽略)。設供電電壓為VCC,則導通時通過每個紅外LED的I大小為:

關斷時通過每個LED的I為0。
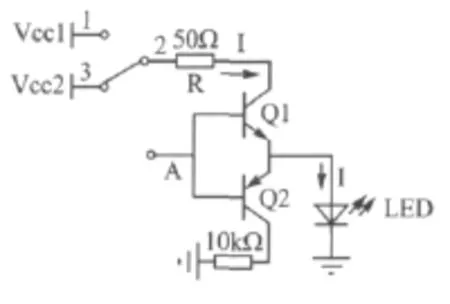
圖4 紅外LED驅動電路基本原理圖

設相機的曝光時間為T,則在這段時間通過紅外LED的平均電流為:假設調節第n個紅外LED的脈沖占空比為αn(0<αn<1),則通過此紅外LED的平均電流IF為:
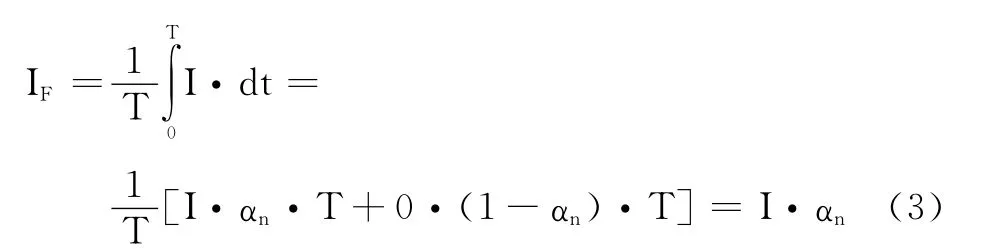
紅外LED的發光強度決定于平均電流IF=Iαn,即決定于“原始電流”I的值和脈沖占空比αn的大小,I的大小主要決定于VCC的大小。設計紅外LED驅動電壓的大小可進行切換,這樣在近距離測量時,切換成小的驅動電壓,則電流I較小,配合脈沖占空比調節可以在近距離測量時獲得高的調節精度;在遠距離測量時,切換成大的驅動電壓,電流I較大,可以滿足發光亮度的需求。
2.2 靶點控制驅動電路設計
圖5為多路LED驅動芯片MAX6964的設計工作電路原理圖,MAX6964共有17個用于驅動LED的開路輸出端口,MCU使用I2C串行接口和MAX6964相連,通過串行接口將發光亮度調節參數寫入MAX6964內部相應的控制寄存器,實現對芯片工作的控制。芯片輸出端口為開路輸出,存在兩種狀態:“高阻態”、“低電平”。當輸出端口狀態為“高阻 態”時,LED 關 斷;為 “低 電 平”時,LED 導 通。MAX6964輸出端口的PWM調節正是基于以上實現的。但是由于其芯片設計每個輸出口最大允許通過電流值為50mA,最大輸入電壓為7V,芯片接地電流最大允許350 mA,這些電流限制使得驅動紅外LED時發光亮度不能滿足需求,但是其多路輸出PWM調節功能是本文所需要的。
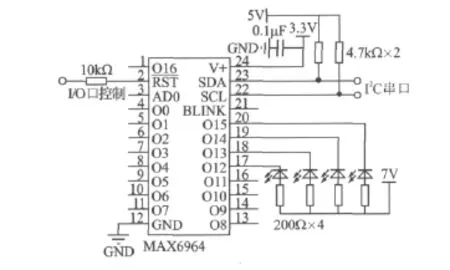
圖5 多路LED驅動芯片MAX6964的設計工作電路原理圖
根據其輸出口特性,結合紅外LED驅動電路原理,設計了如圖6所示的紅外LED控制驅動電路。利用MAX6964輸出端口為開路輸出的特性,通過在端口加上拉電阻構成新的輸出端口。芯片輸出端口為“高阻態”狀態時,上拉電阻使C點為高電平,直接用其驅動推挽電路則使紅外LED導通,與芯片本身設計“高阻態”狀態時紅外LED關斷相矛盾,給控制程序設計帶來不必要的困難。所以,使用反相器對輸出電平進行反向,經過反向后輸出到A點得到低電平,驅動推挽電路使紅外LED關斷;同理,芯片輸出端口狀態為“低電平”時,紅外LED導通。通過MCU的I/O口控制繼電器,切換紅外LED驅動電路的驅動電壓,實現了調節“原始電流”I大小的功能。
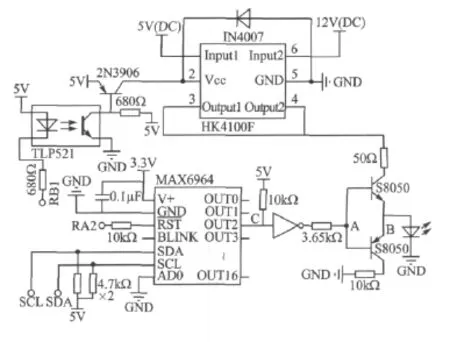
圖6 紅外LED控制驅動電路原理圖
圖7為單片機控制系統電路圖,此設計中選用的單片機型號為PIC16F873A。首先,I2C串行接口RA2用來連接MAX6964控制端口,配合串行接口進行控制;異步串行接口用來和計算機進行通信,I/O口RA5控制數據信號電平轉換芯片 MAX491的發送、接收使能;I/O口RB1控制繼電器切換;I/O口RA0、RA1控制一紅一綠兩個彩色LED燈的發光或熄滅,同時此LED還可作為狀態指示燈;RA3控制蜂鳴器開關實現報錯提醒功能;利用I/O口RB4~RB7輸入電平變化可產生中斷的特點,使用RA4、RA5設計兩個按鍵,作為功能擴展備用。
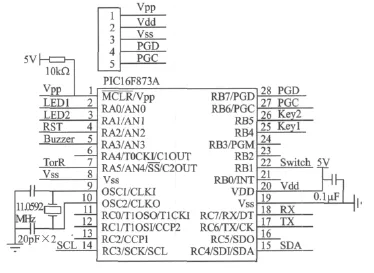
圖7 單片機控制系統電路圖
2.3 通信電路設計
主通信電路原理圖如圖8所示,可使用有線和無線兩種數據傳遞方式。數據發送時,首先使用MAX232芯片將計算機通過自身RS-232接口傳遞的數據轉換為兩路TTL電平信號,一路信號經過光電隔離后,通過MAX490芯片轉換為差分信號,由RS-485接口將數據傳遞到紅外LED控制驅動電路;另一路經過反相器提升負載能力后接入無線收發接口,在該接口連接上,無線收發器可以無線方式將數據傳遞到副通信電路。
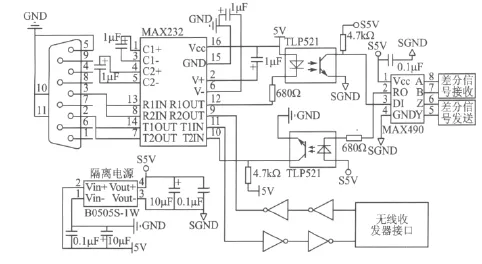
圖8 主通信電路原理圖
副通信電路原理圖如圖9所示。其工作在無線模式下,使用無線收發器和MAX490芯片實現TTL電平信號與差分信號的相互轉換,同時使用光電耦合器進行光電隔離,配合在無線模式下工作主控電路實現無線模式通信功能。
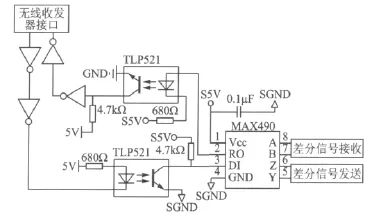
圖9 副通信電路原理圖
3 軟件編程
計算機和單片機之間制定了每條命令(控制信息)的數據傳遞格式、數據量以及校驗方式。程序設置串口打開中斷,串口接收到數據并轉入中斷程序,在中斷程序中,將接收的數據存儲下來并對命令接收計數值加“1”,然后判斷是否整條命令接收完成。如果傳遞的數據量達到了規定命令,則清零接收計數值,等待接收下一組命令,同時置“1”命令標志位;主程序運行時不斷查詢命令標志位,如果發現其被置“1”,說明接收到一條完整的命令,先進行校驗,判斷接收到的命令數據是否正確,然后根據數據中包含的控制信息執行相應的操作。單片機程序流程圖和調節函數流程圖略——編者注。
4 實 驗
MAX6964可產生占空比從1/240到240/240的脈沖信號。選擇5V、12V直流電壓作為驅動電壓,限流電阻為50Ω。繼電器切換到供電電壓5V時,通過示波器觀察到限流電阻兩端電壓差為3.5V時,則通過紅外LED的“原始電流”I的值為70mA;切換到12V工作時,通過示波器觀察到限流電阻兩端電壓差為10.2V。同理,此時驅動紅外LED的I值為204mA。根據不同的占空比,計算出平均電流IF。
占空比與電流對應關系表略——編者注。
跟蹤測量時,保證10次/s測量,曝光時間最大設為30ms,此時平均電流超過140.25mA時,相機距離紅外LED約10.5m可以拍攝得到符合要求的靶點成像,所以本文將占空比最高定為196/240。經過實驗,使用5V電壓驅動紅外LED,可以在2.5~6.5 m范圍內獲得良好的調節效果;使用12V電壓驅動紅外LED,可以在4~10m范圍內取得良好的調節效果。
結 語
通過實驗數據可以看出,通過PWM方式配合驅動電壓大小切換可大范圍的調節通過紅外LED的平均電流大小,切換到小電壓驅動可滿足靶點和相機距離較近時調節精度的要求,而切換到大電壓驅動可滿足靶點和相機距離較遠時發光強度的要求。
編者注:本文為期刊縮略版,全文見本刊網站www.mesnet.com.cn。
[1]黃鳳山.光筆式單攝像機三維坐標視覺測量系統關鍵技術的研究[D].天津:天津大學,2005.
[2]李云飛,司國良,郭永飛.科學級CCD相機的噪聲分析及處理技術[J].光學精密工程,2005(13):159-163.
[3]郝云彩,楊秉新,張國瑞.線陣CCD相機細分采樣成像的像質研究[J].光學學報,2000,20(10):1407-1411.
[4]劉長英,車仁生,黃慶成,等.視覺測量中光學特征點亮度控制方法研究[J].光學精密工程,2004,12(3):93-96.
[5]唐巍.基于紅外LED的光學測棒優化控制技術[D].哈爾濱:哈爾濱工業大學,2006.
[6]程安寧,王晉,尚相榮.白光LED的PWM驅動方式分析[J].電子設計工程,2010,18(2):109-111.
[7]L Svilainis.LED PWM dimming linearity investigation[J].Displays,2008,29(3):243-249.
[8]盧亞普,陳強,張世福.RS485總線調試設備的接口設計[J].信息科技,2011(1):58-60.
