基于ControlLogix和Intouch的無軸傳動實驗平臺設(shè)計
2012-09-25 01:48:58劉興華饒志波蔣其斌李新國
電氣傳動自動化 2012年5期
劉興華,饒志波,蔣其斌,李新國
(1.重慶大學(xué)自動化學(xué)院,重慶 400044;2.中國石油新疆油田,新疆克拉瑪依 834000)
1 引言
在傳統(tǒng)的機(jī)械中為了實現(xiàn)各個運動單元之間的位置同步及速度同步,通常采用機(jī)械軸和齒輪傳動。為了改變各個傳動點之間的速度比和相位關(guān)系還需要安裝無極變速箱和差速箱。這種傳動方式為有軸傳動。
無軸傳動又稱電子軸傳動或者獨立傳動、無機(jī)械傳動。其特點是每個傳動點都有自己獨立的驅(qū)動電機(jī),而不是由一個大電機(jī)拖動多個傳動點,因而只需通過簡單的幾個參數(shù)設(shè)定就可以取代原來無極變速箱及更多更復(fù)雜的齒輪及連桿機(jī)構(gòu)的功能,傳動精度也不會隨著機(jī)械的老化、磨損越來越差。無軸傳動在機(jī)械中的運用簡化了機(jī)械潤滑系統(tǒng),降低了機(jī)器噪音,減少了機(jī)械振動,節(jié)省了空間。目前無軸傳動的應(yīng)用越來越廣泛[1]。
利用羅克韋爾自動化的新一代實時控制網(wǎng)絡(luò)平臺ControlLogix所具有的強(qiáng)大的聯(lián)網(wǎng)通信能力,提出了網(wǎng)絡(luò)分布式多軸同步控制的方法,設(shè)計突破了傳統(tǒng)的機(jī)械剛性連接以及使用PLC/運動控制卡集中控制的多軸同步運動控制方法,實現(xiàn)了對控制多部伺服電機(jī)驅(qū)動器進(jìn)行網(wǎng)絡(luò)化控制的分布式實時同步控制。在此基礎(chǔ)上,Intouch軟件開發(fā)了上位機(jī)監(jiān)控平臺,以實現(xiàn)對現(xiàn)場采集數(shù)據(jù)的處理、保存等操作。
2 伺服平臺的組成架構(gòu)
該伺服系統(tǒng)實驗平臺的設(shè)計主要是基于ControlLogix控制系統(tǒng)搭建的網(wǎng)絡(luò)型伺服系統(tǒng)。選擇Ethernet/IP作為計算機(jī)編程和監(jiān)控的網(wǎng)絡(luò),SERCOS網(wǎng)絡(luò)作為運動控制網(wǎng)絡(luò),ControlLogix系統(tǒng)作為伺服系統(tǒng)的控制平臺;選擇相應(yīng)的伺服驅(qū)動器、伺服電動機(jī)作為伺服驅(qū)動系統(tǒng),且以兩軸精密定位平臺作為伺服系統(tǒng)的被控對象,設(shè)計出能實現(xiàn)高精度實時控制的無軸傳動控制系統(tǒng)。其硬件結(jié)構(gòu)如圖1所示。

圖1 無軸運動控制實驗平臺架構(gòu)
ControlLogix系統(tǒng)是一款功能強(qiáng)大的可編程控制器系統(tǒng),在ControlLogix控制系統(tǒng)平臺上,可以實現(xiàn)順序控制、過程控制以及運動控制,可以實現(xiàn)網(wǎng)絡(luò)通信、數(shù)據(jù)采集和監(jiān)視控制,同時可以實現(xiàn)伺服系統(tǒng)的轉(zhuǎn)矩/電流、轉(zhuǎn)速和位置的控制等功能。SERCOS網(wǎng)絡(luò)接口采用1756-M08SE運動控制模塊,它提供ControlLogix控制系統(tǒng)與伺服驅(qū)動器(Ultra3000-SE數(shù)字型數(shù)字驅(qū)動器)之間的光纖連接通道。模塊與驅(qū)動器之間的通信通過SERCOS光纖網(wǎng)絡(luò)環(huán)實現(xiàn)。由于光纖介質(zhì)具有良好抗干擾性和高速數(shù)據(jù)傳送的性能,因此光纖環(huán)網(wǎng)的使用極大地提高了通信速率以及驅(qū)動器和運動模塊之間的互連性。
伺服驅(qū)動器和伺服電機(jī)是整個伺服系統(tǒng)的核心,數(shù)據(jù)的主要處理就是在這里進(jìn)行的,該伺服系統(tǒng)實驗平臺選用的是帶SERCOS接口的Ultra3000-SE型的數(shù)字伺服驅(qū)動器和Y系列的伺服電機(jī)。
上位機(jī)監(jiān)控采用的是Intouch9.5組態(tài)軟件開發(fā)平臺,它是整個伺服上位機(jī)平臺的數(shù)據(jù)分析、處理和監(jiān)控平臺。
3 平臺的設(shè)計內(nèi)容及總流程
ControlLogix5555控制器是最新一代的集成化控制系統(tǒng),它將多種控制方式集成在單一的控制器中,其中包括順序控制、過程控制和驅(qū)動控制等。該實驗平臺應(yīng)用ControlLogix控制系統(tǒng)的編程軟件RSLogix5000編寫控制程序,通過SERCOS網(wǎng)絡(luò)通信實現(xiàn)兩軸伺服系統(tǒng)在無軸傳動下的速度和位置的精確實時控制。在此基礎(chǔ)上,系統(tǒng)采用Intouch組態(tài)軟件實現(xiàn)上位機(jī)的數(shù)據(jù)采集和監(jiān)控。設(shè)計的主要內(nèi)容如下:
(1)建立ControlLogix網(wǎng)絡(luò)通信平臺:在熟悉ControlLogix網(wǎng)絡(luò)結(jié)構(gòu)和相關(guān)通信協(xié)議基礎(chǔ)上,選擇搭建平臺所需的硬件(ControlLogix5555控制器、1756-M08SE模塊、Ultra3000-SE伺服驅(qū)動器、Y系列伺服電機(jī)、PC機(jī)等)組態(tài)兩軸交流伺服運動控制平臺。
(2)實現(xiàn)伺服電機(jī)的同步控制:利用1756-M08SE運動模塊對Ultra3000-SE伺服驅(qū)動器進(jìn)行控制,ControlLogix5555控制器通過運動控制模塊對伺服驅(qū)動器發(fā)出運動控制命令,使兩臺伺服電機(jī)速度同步。
目前信息化技術(shù)主要應(yīng)用在工程施工前的招標(biāo)、投標(biāo)、預(yù)算、設(shè)計等,在工程施工建設(shè)以及安全管理方面并沒有得到有效應(yīng)用。項目工程管理人主要還是依靠管理者的經(jīng)驗以及能力進(jìn)行現(xiàn)場管理,缺少科學(xué)性、系統(tǒng)性、規(guī)范性。
(3)通過RSLogix5000編寫運動控制應(yīng)用程序:包括添加伺服模塊、創(chuàng)建和組態(tài)運動軸、建立運動控制應(yīng)用程序等。
(4)編寫人機(jī)監(jiān)控界面:基于RSLinx通信服務(wù)器,建立Intouch組態(tài)監(jiān)控界面,實現(xiàn)上位機(jī)對數(shù)據(jù)的采集、分析和保存。
其設(shè)計的總體流程如圖2所示。
4 軟件平臺的實現(xiàn)
該實驗平臺系統(tǒng)的軟件總體設(shè)計流程如圖3所示。
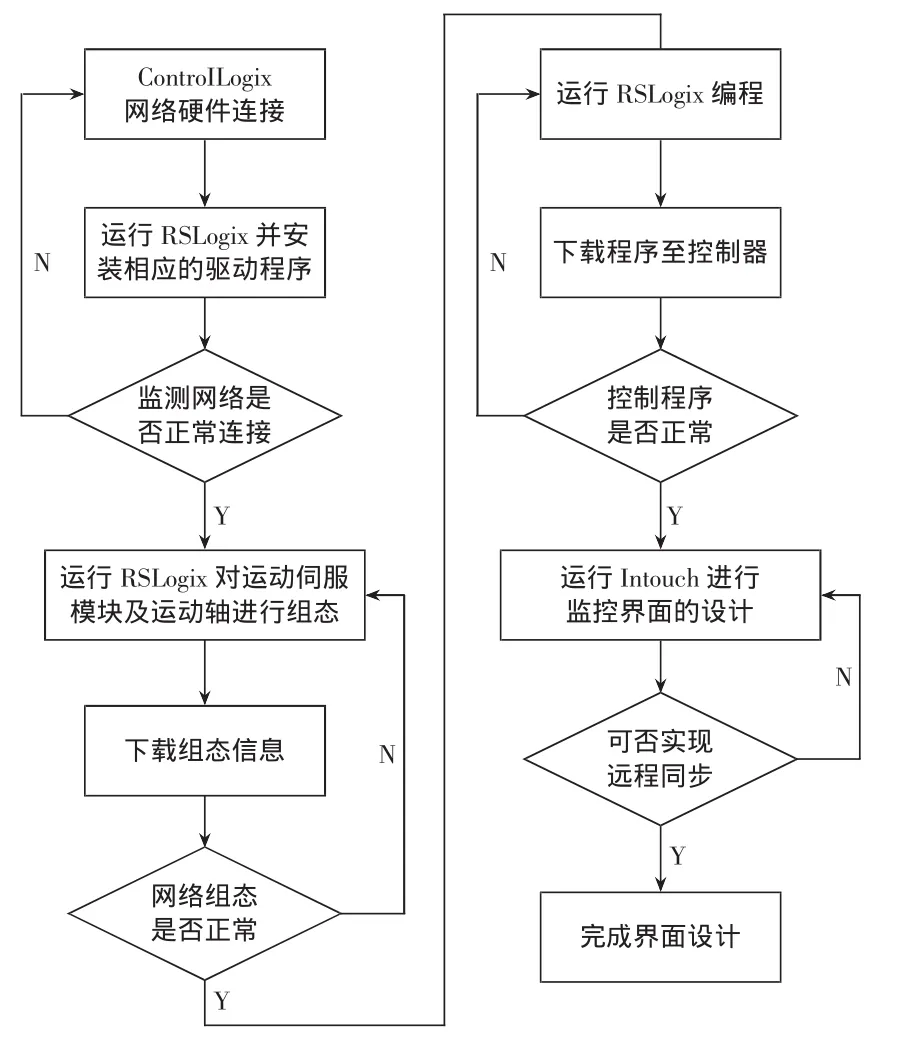
圖2 總體設(shè)計流程
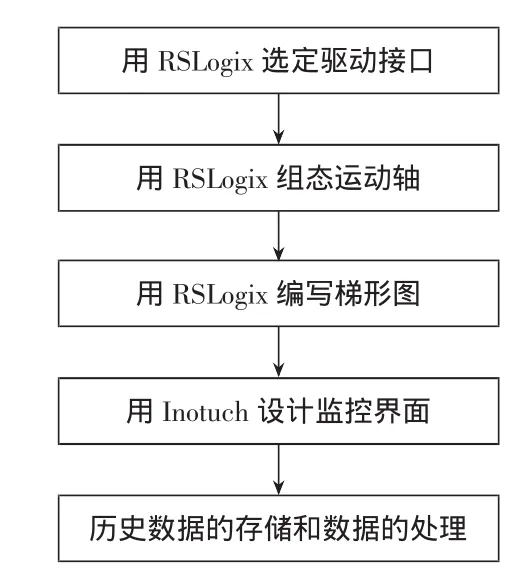
圖3 軟件設(shè)計流程
可以看到,運動控制平臺主要是基于RSLogix5000平臺開發(fā)的,上位機(jī)監(jiān)控平臺主要是基于Intouch9.5開發(fā)的。對于關(guān)鍵的幾個模塊我們的設(shè)計如下:
4.1 RSLogix5000運動控制平臺程序設(shè)計
運動控制平臺應(yīng)用ControlLogix控制系統(tǒng)的相應(yīng)編程軟件RSLogix5000編寫控制程序。該軟件支持運動控制功能和SERCOS網(wǎng)絡(luò)通信,可以實現(xiàn)網(wǎng)絡(luò)型伺服系統(tǒng)的轉(zhuǎn)矩/電流控制、位置控制、速度控制、多軸同步控制和多軸插補(bǔ)控制。
在編寫運動控制程序前,應(yīng)先進(jìn)行系統(tǒng)的通訊配置、通訊模塊組態(tài)、位置坐標(biāo)系的組態(tài)、標(biāo)簽變量的創(chuàng)建等工作。
該系統(tǒng)主要使用梯形圖語言來編寫運動控制程序。MainRoutine為系統(tǒng)默認(rèn)的主程序,用于完成循環(huán)掃描、調(diào)用子程序和返回原點的操作。它包含三個子程序,如圖4所示。
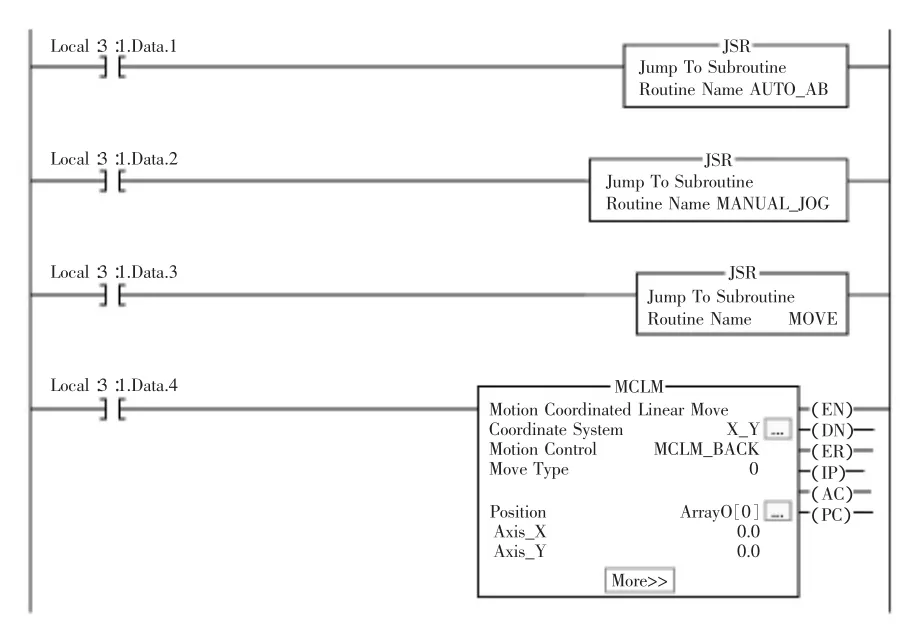
圖4 運動控制主程序
(1)AUTO_AB用于運行在給定的編寫的伺服程序下的自動控制程序;
(2)MANUAL_JOG子程序?qū)崿F(xiàn)兩個軸的點動、移動定長和停止等控制;
(3)MOVE用于定原點、實現(xiàn)兩軸同步控制功能等操作。
4.2 Intouch上位機(jī)監(jiān)控平臺實現(xiàn)
系統(tǒng)使用Intouch9.5軟件中的各種控件,設(shè)計伺服系統(tǒng)監(jiān)控界面,其監(jiān)控界面總體的功能架構(gòu)如圖5所示。
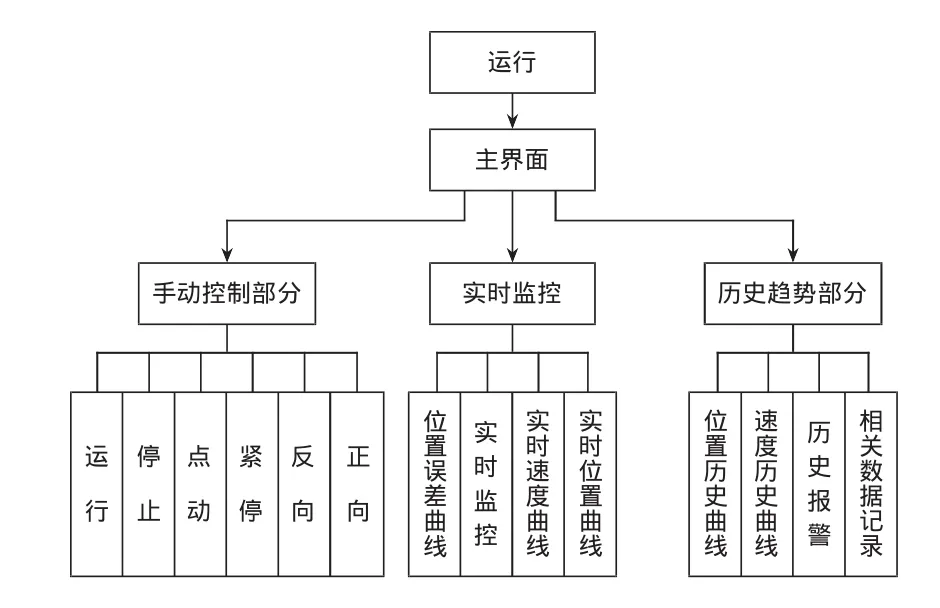
圖5 監(jiān)控界面總體功能圖
由架構(gòu)圖可知,控制界面主要包括主界面下的手動部分、實時監(jiān)控部分、歷史趨勢部分等部分,其各個部分又由各個不同的子動作部組成,用于實現(xiàn)各個驅(qū)動器的使能、關(guān)斷和重置控制;實現(xiàn)各個軸的零點定位、點動、定長移動、急停等控制;檢測各軸的狀態(tài)信息,如實際位置、實際速度等信息。監(jiān)控系統(tǒng)的主界面如圖6所示。
監(jiān)控界面主要包括主界面、登錄界面(EXIT)、使用說明、位置歷史趨勢及相關(guān)數(shù)據(jù)記錄、速度歷史趨勢及相關(guān)數(shù)據(jù)記錄和報警清除及報警記錄等界面。
主界面用于兩軸伺服運行的實時監(jiān)控;登錄界面用于用戶的登錄和操作權(quán)限的設(shè)置;位置歷史趨勢和速度歷史趨勢界面分別用于其相應(yīng)變量的歷史趨勢;報警消除及報警記錄用于消除一些非硬件問題的報警和報警的記錄。
4.3 Intouch與Microsoft Access數(shù)據(jù)庫的連接
系統(tǒng)中由于要實現(xiàn)對相關(guān)的數(shù)據(jù)(報警數(shù)據(jù)及位置數(shù)據(jù))的處理和存儲,因此要將一些指定數(shù)據(jù)寫入數(shù)據(jù)庫,這里采用的是寫入事先建好的Microsoft Access數(shù)據(jù)庫。要實現(xiàn)與Microsoft Access通訊,可以通過在Intouch QuickSript中執(zhí)行SQLConnect()函數(shù)來實現(xiàn)。
SQLConnect()函數(shù)用于將Intouch連接到Microsoft Access數(shù)據(jù)庫。通過運行包含SQLConnect()函數(shù)的腳本,就可以登錄到數(shù)據(jù)庫服務(wù)器,并打開一個連接,以便運行其它SQL函數(shù)。SQLConnect()使用的連接字符串的格式如下:
SQLConnect(ConnectionId,"<attribute>=<value> ;<attribute>=<value> ;..");DSN 是 Microsoft Access使用的一個獨特屬性,用于確定在“Microsoft ODBC管理器”中配置的數(shù)據(jù)源的名稱。本系統(tǒng)中采用ODBC數(shù)據(jù)接口連接為:
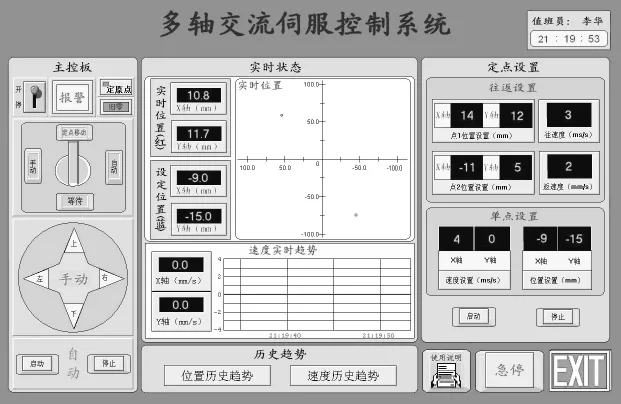
圖6 監(jiān)控主界面
ResultCode = SQLConnect(ConnectionId,"DSN=SQLAM_Access");必須注意的是“SQL訪問管理器”支持的有效數(shù)據(jù)類型取決于所使用的ODBC驅(qū)動程序的版本。
5 結(jié)論
設(shè)計的無軸伺服系統(tǒng)實驗平臺采用先進(jìn)的ControlLogix控制系統(tǒng)以及先進(jìn)的控制技術(shù)實現(xiàn)了對兩軸運動的精確定位和運動軌跡的控制,先進(jìn)的SERCOS網(wǎng)絡(luò)通信保證了系統(tǒng)的快速性和實時性。實驗結(jié)果表明:該系統(tǒng)能確保在較小誤差的情況下按照所設(shè)定的參數(shù),實現(xiàn)位置控制和軌跡運動控制,系統(tǒng)運行穩(wěn)定、可靠。系統(tǒng)監(jiān)控的界面能夠?qū)崟r地反映實時的運動軌跡和趨勢,為操作員提供了一個直觀、方便的操作界面。該實驗平臺的成功設(shè)計也為許多工業(yè)現(xiàn)場無軸傳動控制系統(tǒng)的設(shè)計提供了很好的借鑒。
[1]爾桂花,等.運動控制系統(tǒng)[M].北京:清華大學(xué)出版社,2002:365-371.
[2]吳乃優(yōu),等.SERCOS協(xié)議和同步控制方法[J].電氣傳動,1999,(6):31-33.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
金秋(2017年4期)2017-06-07 08:22:16
中國材料進(jìn)展(2016年10期)2016-12-26 06:50:20
