雙機架鋁帶連軋機張力系統的模糊神經PID控制
2012-09-19 02:50:00李聯飛許展望連斌忠梁光正
重型機械 2012年4期
李聯飛,許展望,連斌忠,郭 韡,梁光正
(中國重型機械研究院有限公司,陜西 西安710032)
雙機架鋁帶連軋機張力系統的模糊神經PID控制
李聯飛,許展望,連斌忠,郭 韡,梁光正
(中國重型機械研究院有限公司,陜西 西安710032)
針對1 850 mm雙機架鋁帶冷連軋過程中張力控制系統(ATC)存在參數時變、非線性等問題和傳統PID參數不易整定的局限,建立了速度-張力系統數學模型,在誤差絕對值積分函數(IAE)和最大靈敏度(Ms)的準則約束下,提出了通過離線極點配置訓練模糊神經網絡(FNN),在線FNN可以根據系統參數的變化獲取恰當PID控制器參數的控制策略。Matlab仿真表明,本控制算法具有較好的動態特性和控制精度,對參數時變性的ATC系統具有良好的控制效果。
鋁帶冷連軋機;張力控制系統;極點配置;模糊神經PID控制;Matlab仿真
0 前言
冷連軋機控制系統是復雜的機電液多變量耦合系統,在實際軋制過程中,影響機架間張力的工藝因素很多,使得被控對象參數具有非線性、時變性等特點,常規PID控制器難以獲得滿意的控制效果[1]。
結合某鋁廠1 850 mm雙機架鋁帶冷連軋機AGC系統的實際情況,本文采用基于極點配置的模糊神經PID控制,在給定性能指標(IAE和Ms)下,配置相應的極點,計算出此時PID控制器的參數。構建神經網絡,離線時,根據極點配置所得樣本和導師信號訓練網絡,映射變化參數和PID調節器參數之間的關系;在線時,先用遞推最小二乘辨識系統參數,再利用離線訓練好的網絡實時給出符合指標要求的控制器參數,實現PID參數的在線自整定。
1 1 850鋁帶冷連軋機張力控制系統數學模型
某鋁廠1 850雙機架鋁帶冷連軋機配置如圖1所示,機架間張力主要是通過調節主傳動電機轉速來實現的,維持機架間張力參數在固定范圍內,防止拉斷,控制板厚。鑒于二機架出口為成品帶材,為保持出口良好板形,本系統選取Std#2為標準機架,主要調節Std#1主傳動電機轉速,而維持機架間張力給定恒定。

圖1 1850雙機架鋁帶冷連軋機機架配置Fig.1 Assignment of 1 850 double-stand aluminum strip cold rollingmill
Std#1出口速度v1h與Std#2入口速度v2H不相等時,將產生張力波動,且滿足如下的關系[2]

式中,σ為張應力(單位面積上所受的張力);E為材料的彈性模量;ε為應變系數;v2H為二機架入口帶速;v1h為機架出口帶速,l為機架間的距離。
帶材速度差產生張力,而在張力作用下,速度差也不再是常量,是張力的函數,當張力增加時,金屬向前流動的阻力減小,增加前滑區,使前滑值增加[3]。張力在應用范圍內,前滑與張力的關系可用直線規律表示

式中,v1為Std#1軋輥線速度;fh為自由軋制時的前滑系數;α為張力前滑影響系數。
將式(2)代入式(1)中,并整理可得

對式(3)進行拉氏變換有,則
式中,KT=1/αv1;τT=l/AEαv1,A=Bh;B為鋁帶寬;h為機架間鋁帶厚度,T為張力。
為了保持電樞電流在動態過程不超過允許值,在突加控制量時超調盡可能的小,應把電流環校正為典型I型系統。基于穩態無靜差和較好的抗干擾性考慮,轉速環應當校正為典型Ⅱ型系統[4]。張力環投入使用時,速度調節器輸出為限幅值k,轉速開環,轉速調節器不再起作用,保持恒張力軋制[5]。電動機電樞電流隨張力變化,所以對于張力控制器,電流環為內環。整個張力環動態結構如圖2所示。圖2中,WACR(s)為電流調節器,Toi、Tot為電流、張力檢測濾波常數,β、γ為電流、張力反饋系數;R為電樞電阻回路總電阻;ks為晶閘管裝置放大倍數;Ts為整流裝置滯后時間常數;Tl為電樞回路電磁時間常數,Tm為拖動系統機電時間常數。

圖2 機架間張力動態結構圖Fig.2 Tension dynamic structure between stands
2 基于極點配置的模糊神經PID控制設計
基于張力環節傳遞函數參數時變性的特點,在參數的變化范圍內隨機的取n組值(也即有n個參數確定的被控對象),在誤差絕對值積分函數(IAE準則)和最大靈敏度Ms指標的約束下,配置n個被控對象下的主導極點與非主導極點,計算出此時被控對象的n組PID控制器參數,然后構建簡單的FNN網絡,使n組張力環節時變的參數值和n組計算獲得PID的參數(kp、ki、kd)值作為此FNN網絡的樣本和導師信號,離線訓練此網絡,調整網絡的權值和隸屬度函數的參數,在極小的誤差范圍內,使得網絡能夠映射k=F(a,b),其中k=(kp、ki、kd),a、b為變化的參數。然后在線時,通過最小二乘法實時辨識張力環節參數,再利用該訓練好的網絡實時給出符合指標要求的控制器參數,實現PID參數(kp、ki、kd)的在線自整定。
2.1 基于IAE和性能指標的極點配置
在單位反饋閉環控制系統中,設系統的被控對象為

假定,n>m,并且式(5)的特征根具有負實部。
PID控制器的傳遞函數為

整個閉環傳遞函數的特征多項式為

顯然式(7)有n+1個極點,利用極點配置來保證系統的特性。為了保證系統的穩定性,設計控制器的參數(kp、ki、kd)以致使式(7)的所有根在復平面的左半部分。在設計控制器的參數時,對于系統的穩態誤差和魯棒性,考慮誤差絕對值積分函數IAE,和最大靈敏度Ms,其表達式分別如下
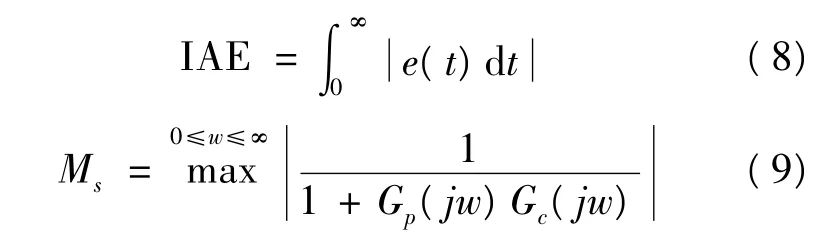
最大靈敏度的典型值一般介于1.3到2之間[6]。
為了利用極點配置控制系統的動態性能,按照IAE、Ms準則,主導極點與非主導極點應該配置在復平面的合適位置,如圖3所示。
考慮控制器可調節的參數(kp、ki、kd)及式(7)有n+1個根,可以設置閉環系統的三個極點,其余極點相應地也已獲得。設期望的極點為

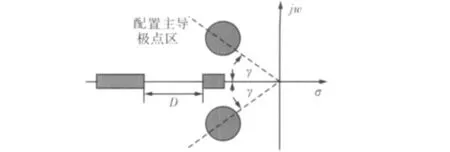
圖3 復平面中配置極點的區域Fig.3 Regions of dominant and insignificant poles in complex plane

即說配置的極點確定后,控制器參數(kp、ki、kd)也就按照式(15~17)確定了,PID控制器也就設計出來了。當確定了期望極點后,其余相應的極點也就確定了,但必須滿足其余極點在復平面的左半部分并遠離主導極點,如圖3所示,主導與非主導極點之間的距離D=5ω0max(α0,ξ0)。
2.2 FNN網絡結構及其算法
用FNN的任意非線性逼近,表述本算法即為:對于給定的映射關系f:Rn→RP,任意的K?Rn,ε>0,總存在一個FNN網絡F(x,w),使得都成立。
2.2.1 FNN模型結構
FNN結構如圖4所示,網絡分為四層。第一層為輸入層,輸入x=[x1,x2,…xn]為被控對象變化參數的個數。在參數的變化范圍內可把其任細分,獲得輸入樣本。

圖4 模糊神經網絡結構Fig.4 FNN structure diagram
第二層為隸屬度函數,本結構選用高斯函數,輸入輸出關系為

向量bi、Ci分別表示高斯函數寬度和中心值。由于這種映射關系總能建立,所以語言變量值可以選取最精簡的個數[7]。
第三層為規則層,每條規則的強度通過神經元的代數積運算得到。對于給定的輸入向量x,可以求得第i條規則的強度為

第四層為輸出層,輸出PID控制器的三個參數。由于是離線訓練,因此每條規則強度都可以被激活。輸出可描述為

式中,S為1×(m×n)的規則強度矩陣;wp為(m×n)×1的權系數矩陣;ki、kd同理可得。
對于位置式數字PID控制器,其控制量為

2.2.2 FNN模型離線訓練算法
本文采用改進的梯度下降法來調整參數,包括規則的連接權值、閾值以及隸屬度函數的中心值和寬度。FNN離線控制框圖如圖5所示。
定義性能指標函數為

式中,yp(k)為導入信號;(k)為估計輸出。
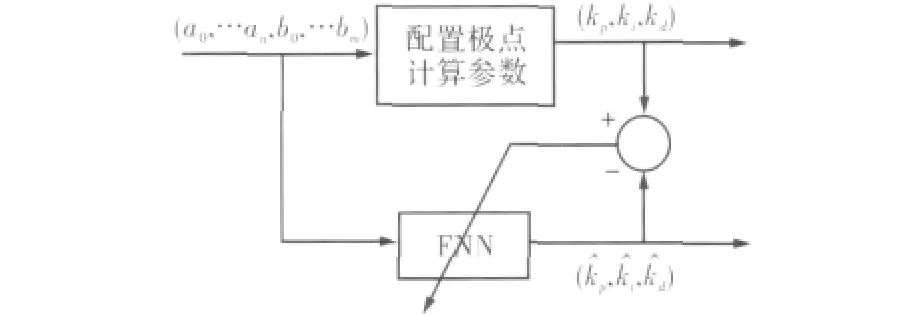
圖5 FNN離線訓練框圖Fig.5 Off-line training architecture of FNN
按照改進梯度下降法修正網絡權系數,即按性能指標函數對加權系數的負梯度方向搜索調整,并附加一使搜索快速收斂的極小慣性項。

式中,Θ(k)=(m,σ,w)為FNN網絡的權系數矩陣。根據誤差反傳算法,規則更新如下:

網絡中具體參數更新規則如下:對于連接權值和閾值有:

輸入語言變量值隸屬度函數中心值和寬度的迭代算法如下:

其中,η(0<η<1)為學習速率;ρ(0<ρ<1)為慣性系數,可加快收斂速度。
2.2.3 FNN在線自適應
極點配置方式得到的樣本和導師信號訓練FNN網絡后,就得了能夠在線自適應的FNN控制器。為了實時得到被控對象參數,首先應該把連續系統離散化,利用最小二乘法實時辨識被控對象的參數,如圖6所示。
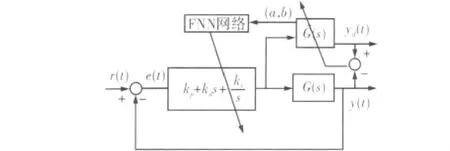
圖6 FNN網絡的在線自適應Fig.6 On-line self-adaption of FNN
4 系統的仿真研究
4.1 仿真模型
根據某鋁廠1 850冷連軋機AGC的實際情況,在投入張力AGC時,速度環開環,張力控制系統只包括電流內環和張力外環。1 850冷連軋機部分技術參數如表1所示。
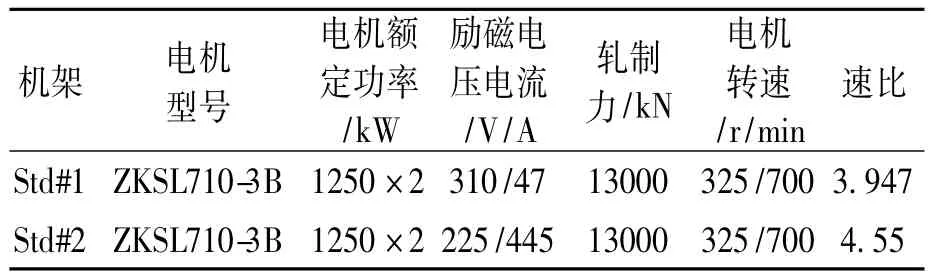
表1 1850冷連軋機部分技術參數Tab.1 Some specificationsof1 850 clod rollingmill
轉速開環,速度調節器輸出限幅,根據圖2的張力動態結構,帶入參數可得整個張力控制系統的傳遞函數為

由式(4)的推導過程可知KT、τT是眾多變量的函數,如在軋制加減速階段摩擦因子導致的速度變化,機架間厚度波動引起的橫截面積變化,鋁合金在不同相對壓下率引起的彈性模量變化。經計算KT=4.15~14.7,τT=0.042~0.147。
4.2 仿真步驟及結果
基于極點配置的模糊神經網絡PID控制器設計的仿真研究可以分為以下4步:
(1)在IAE和Ms性能指標下配置好極點,然后根據推導的公式計算出PID控制器參數(kp、ki、kd)。程序中在張力環節參數的變化范圍內隨機的取出200個值,然后計算合適的PID參數。
運行程序后產生的200組KT、τT、kp、ki、kd,并且輸出了最后一組經計算獲得PID參數對于此時KT、τT所構成的被控對象仿真結果如圖7所示。
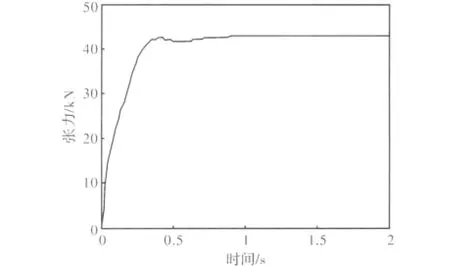
圖7 計算獲得的PID參數控制效果Fig.7 Control effect based on PID parameter calculation
(2)構建FNN網絡。結構為2-5-5-3,以200組KT、τT為網絡輸入樣本,以200組kp、ki、kd為導師信號,訓練FNN網絡,獲取合適的網絡參數。圖8~10比較了FNN網絡輸出的kp、ki、kd與步驟1計算的導師信號kp、ki、kd,結果表明輸出信號能夠跟隨導師信號,網絡訓練比較成功。


圖10 FNN網絡對的跟蹤情況Fig.10 Curve of parameter got by FNN tracking
(3)檢驗訓練好的網絡。隨機地取出步驟(1)中一組輸入樣本(第117組輸入),經過訓練好的網絡輸出的kp、ki、kd作用于第117組輸入樣本所構成的被控對象,控制效果如圖11所示。
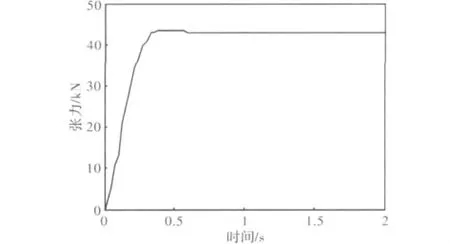
圖11 FNN任意組輸出的控制效果Fig.11 Control effect for any group outputs by FNN
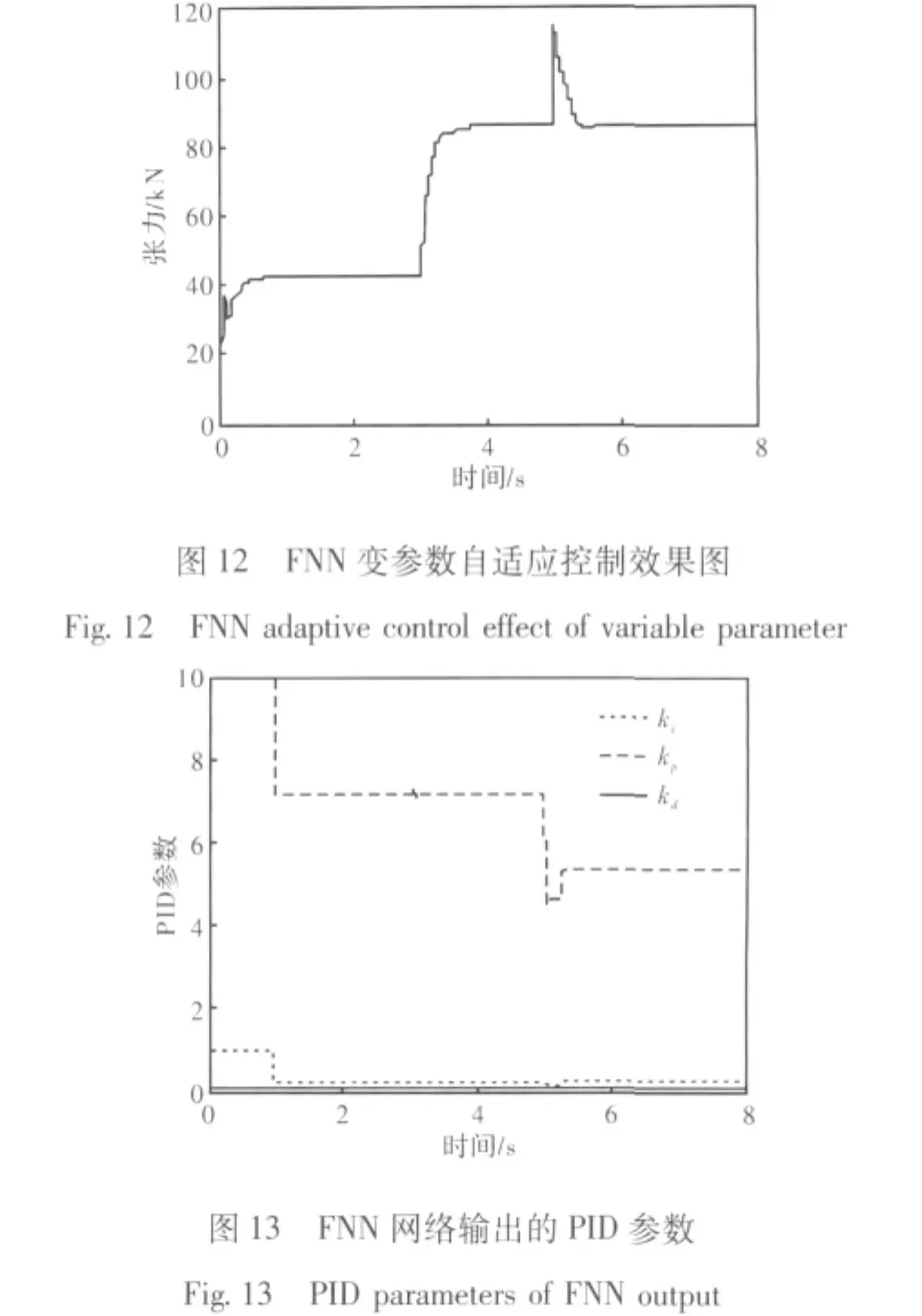
(4)利用遞推漸進消去最小二乘法辨識被控對象的參數,然后利用校正好的FNN網絡進行優化此時的PID參數,用于在線控制。開始時對象參數為τT=0.12,KT=10(開始時刻被控對象受給定參數控制,程序中設定kp=10,ki=0.97,kd=0.0167),然后在第3秒張力設定之增加至84 kN,并在第5秒被控對象的參數變化為τT=0.05,KT=7.5。圖12為控制效果,圖13為FNN網絡輸出的PID參數。
5 結論
本文提出的FNN-PID控制器不但可以在系統參數變化的情況下得到指定的控制效果,更重要的是利用離線訓練好的網絡在線應用保證了軋制過程對實時性的要求。
(1)基于極點配置的模糊神經網絡PID控制器對被控對象的模型精度要求不高,能夠適應現場的復雜環境。
(2)由于在極點配置時對系統的目標性能指標做了約束,因而此種控制器的控制效果優越性較為明顯。
(3)當確定了期望的樣本和導師信號,離線訓練FNN網絡之后,在線應用時能夠快速準確的給出不同控制對象下的控制量,應用較為快速、簡便。
基于極點配置的模糊神經PID控制效果優勢明顯,使得張力控制更加智能化,對于生產高性能、高精度、高表面質量的鋁及其合金帶材提供了有力保障,具有廣闊的發展前景。
[1]鄭申白.軋制過程自動化技術 [M].北京:化學工業出版社,2009.
[2]DANDIL Besir.Fuzzy neural network IP controller for robust position control of induction motor drive[J].Expert Systems with Applications,2009,36(3):4528-4534.
[3]PITTNER John,SIMAAN M A.Contrlo of a continuous tandem cold metal rolling process[C]//2008 American Control Conference.Seattle,WA:ACC,2008:2834-2839.
[4]陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2000.
[5]JANABI-SHARIFI F,LIU J.Neuro-fuzzy tension controller for tandem rolling[C]//Proceedings of the 2002 IEEE International Symposium on Intelligent Control.[S.l.]:IEEE,2002:309-314.
[6]LEE C H,TENG C C.Identification and control of nonlinear dynamic systems using recurrent fuzzy neural networks[J].IEEE Trans.on Fuzzy Syst.2000,8(4):349-366.
[7]劉文軍,牛昱光.基于模糊神經網絡的參數自整定PID控制系統設計 [J].太原理工大學學報,2006,37(3):298-301.
Fuzzy neural PID control of tension system in alum inum strip cold rolling m ill w ith double-stand
LILian-fei,XU Zhan-wang,LIAN Bin-zhong,GUOWei,LIANG Guang-zheng
(China National Heavy Machinery Research Institute Co.,Ltd.,Xi'an 710032,China)
Aiming at the parameter time-varying,nonlinear problems and the limitations of traditional PID parameter tuning existing in the tension control system during aluminum strip cold tandem rolling,a mathematic model of speed-tension system was built.Under the criteria constraints ofminimum integrated absolute error(IAE)and maximum sensitivity(Ms),a new control strategy is proposed,which train fuzzy neural network(FNN)by off-line dominant pole assignment,and gain appropriate PID controller parameter according to the change of system parameters.The Matlab simulation shows that the control algorithm has good dynamic characteristic and the control accuracy,and possesses perfect control effect upon time-varying parameter of tension control system.
aluminum strip cold rolling mill;tension control system;pole assignment;fuzzy neural network PID control;Matlab simulation
TG334.9
A
1001-196X(2012)04-0027-07
2012-01-18;
2012-02-21
李聯飛(1985-),男,中國重型機械研究院有限公司助理工程師。