基于AMESim的直升機液壓助力器建模與仿真
2012-09-16 11:35:22陳宇金萬興云
直升機技術 2012年4期
陳宇金,李 磊,萬興云
(中航工業直升機設計研究所,江西景德鎮 333001)
0 引言
當代直升機大多數采用不可逆液壓助力飛行操縱系統,操縱裝置并不直接操縱旋翼槳葉變距,而是操縱液壓助力器的伺服閥,由液壓助力器驅動旋翼槳葉變距。旋翼槳葉產生的鉸鏈力矩全部由液壓助力器承擔,因此液壓助力器的性能很大程度決定了飛行操縱系統的性能,影響到直升機的飛行穩定性、操縱性和機動性。
液壓助力器作為直升機飛行操縱系統的大型關鍵部件之一,設計、制造和試驗的周期長、成本高,因此在液壓助力器的方案設計和詳細設計之中,針對液壓助力器的構型組成、工作原理和關鍵參數進行設計分析,以判斷其能否滿足設計要求是很重要的。助力器的性能包括靜態和動態兩個方面,不同的任務和使用條件,對液壓助力器性能的要求也不同。助力器的靜態性能要求包括最大輸出力、最大輸出速度、最大行程、工作行程及工作壓力、伺服閥位移及不靈敏區、伺服閥操縱力和結構重量等。助力器的動態性能包括穩定性、跟隨性和快速性[1]。因此本文將以直升機飛行操縱系統液壓助力器為研究對象進行建模與仿真分析。
AMESim(Advanced Modeling Environment for performing Simulations of engineering systems)是法國IMAGINE公司開發的一種專門用于液壓/機械系統的建模、仿真及動力學分析的軟件,它為流體(氣體)動力、機械、熱力和控制等提供較為完善的、簡單易用的綜合仿真平臺,簡化多領域系統的集成。工程師只需簡單地將各個經過驗證的元件模型連接起來,就可以精確地仿真多領域復雜系統的性能,并且可以通過面向應用的仿真功能,評估多物理領域的各個子系統。這使設計者和工程化團隊可以仔細地平衡各個子系統的產品性能,并在昂貴而耗時的物理樣機測試之前獲得最佳的設計方案。AMESim在產品開發周期方案和詳細設計階段的智能系統仿真中發揮的作用,從而真正實現了通過關鍵參數功能設計來驅動新產品開發。
本文首先介紹了一種用于直升機飛行操縱系統的液壓助力器的系統組成和工作原理,對助力器靜動態分析的方法進行研究,然后基于AMESim高級建模和仿真平臺對該類型助力器進行建模,利用該模型對樣例助力器進行仿真分析。
1 助力器系統組成及工作原理
目前我國直升機使用數量最多的飛行操縱系統液壓助力器如圖1所示。該助力器為串聯式作動筒機構,作動筒分隔為上下兩腔,并由兩個復式旋轉分配閥來分別控制。其中活塞桿固定在主減速器殼體上,活塞桿不動而由作動筒殼體位移來驅動自動傾斜器,活塞桿和作動筒殼體共同構成雙向的液壓助力器。助力器主要由輸入搖臂、上復式旋轉分配閥、下復式旋轉分配閥,活塞桿、上作動筒、下作動筒和中間支座等組成。
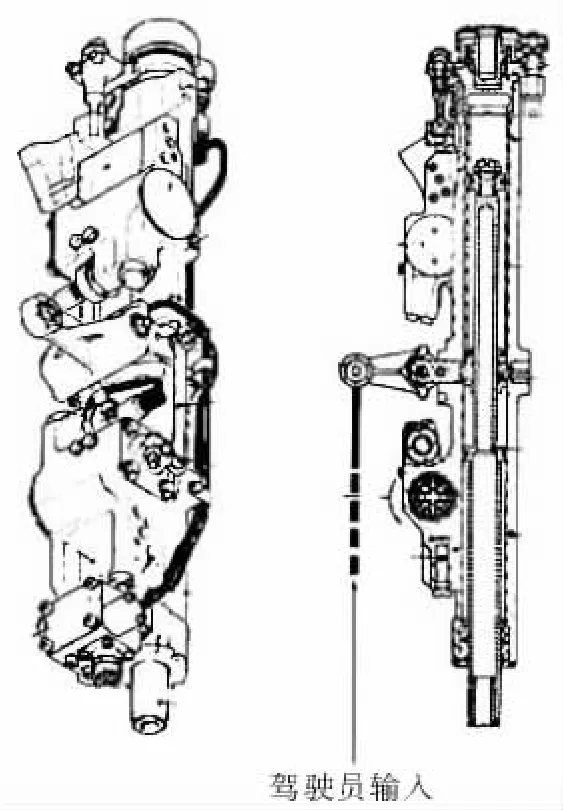
圖1 飛行操縱液壓助力器
圖2所示為主槳助力器處在收縮狀態,當座艙內操縱桿的移動使輸入搖臂向下偏轉一個-α角,則引起助力器分配閥門以相同的方向旋轉-α角。每個作動筒的A腔與壓力油路相通,B腔與回油路相通。主槳助力器縮回,只要駕駛員連續操縱主槳助力器的輸入搖臂,則主槳助力器就可以連續地縮回。
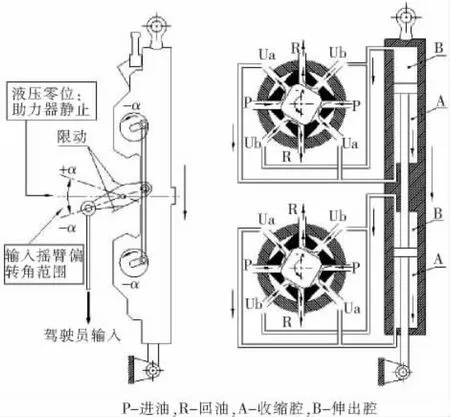
圖2 助力器工作原理
主槳助力器的輸出動作是直接由駕駛員的輸入動作控制的,它的原理是:
只要輸入搖臂在運動,主槳助力器便隨著運動,當搖臂停止運動時,主槳助力器“趕上”搖臂,并使搖臂回到中立位置,這樣助力器分配閥就回到液壓零位,主槳助力器停止運動。
同理,若輸入搖臂向上偏轉一個+α角,則引起主槳助力器伸出。
助力器分配閥的開度角±α角,取決于駕駛員操縱總槳距操縱桿或周期變距桿的速度,從而確定了主槳助力器的移動速度。
2 助力器靜動態分析方法
分析助力器的靜動態性能所采用的方法有經典的控制理論法、物理模擬法、試驗研究法和數字仿真法等。
經典控制理論法一般是對助力器進行簡化,建立物理微分方程數學模型,經拉式變換后畫出方塊圖,得出傳遞函數。在復域里研究助力器傳遞函數的特性,通過相頻特性曲線和幅頻特性曲線分析助力器的響應特性和穩定性。但是由于傳遞函數只適用于描述單一輸入、單一輸出、線性的、低階動態系統,因此經典控制理論方法有一定的局限性。
物理模擬法和試驗研究法需要工程師自身的知識和經驗,利用真實部件構建助力器,在此基礎上進行試驗,研究結構參數對助力器靜動態性能的影響。雖然該辦法的分析結果真實性、準確性比較高,但用這種辦法調節參數比較困難,一次成功的把握性比較小,而且需要投入大量的人力、物力和時間。這種辦法一般用于生產制造完成后,驗證產品的相關性能。
數字仿真方法即計算機仿真,該方法首先建立描述助力器系統狀態的數字模型,然后通過計算機對助力器進行數字仿真,求出其靜、動態特性。這種分析和設計方法的數學模型的建立依據是元件及其組成的系統中力和運動方程、流體力學和熱力學方程,同時還要考慮到油液的黏性變化、壓縮性、摩擦特性和非定常黏性阻力等因素,盡管也有一些不確定因素和一定程度的近似,但比起經典的控制理論,更能全面地反映系統的真實情況,完整地描述系統整個工作過程的狀態變化。
利用計算機對助力器靜動態特性進行數字仿真和分析的步驟如下[2]:
1)建立描述助力器靜動態特性的數學模型;
2)將數學模型轉化為適合計算機仿真的仿真模型(一階微分方程組或差分方程);
3)選用適當的算法編制仿真程序或采用他人現有的程序;
4)通過計算機仿真,獲得系統動態過程參數變化和響應特性的數據或曲線;
5)通過分析系統靜動態性能的仿真結果或進行變參數仿真,得到提高助力器靜動態性能的改進設計。
上述步驟可以用圖3所示框圖來表示[2]。
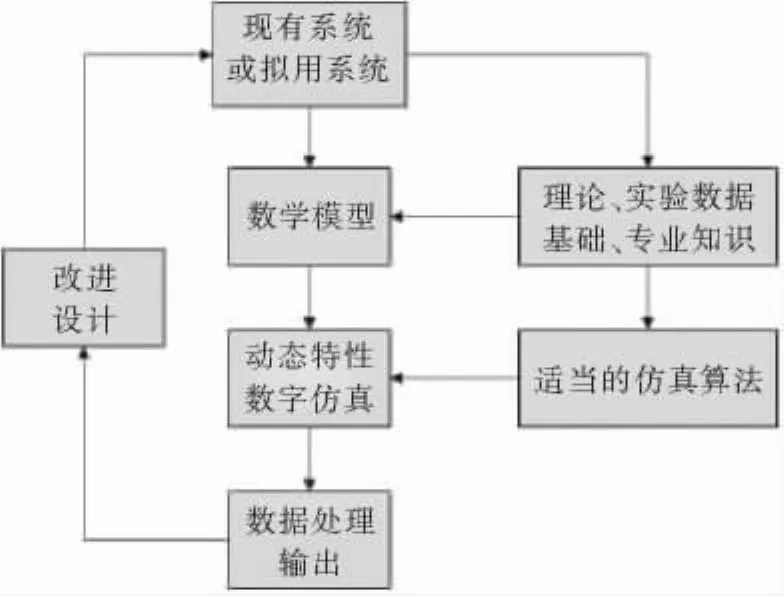
圖3 助力器靜動態特性計算機仿真過程框圖
利用計算機仿真研究助力器靜動態性能的重點和難點有兩個:一是建立描述助力器靜動態性能的數學模型;二是選擇合適的算法編制仿真程序。其中建立一個準確、適用、便于仿真的數學模型又是保證數字仿真周期短、結果準確可信的前提和關鍵。常用的建模方法有解析法、狀態空間法和功率鍵合圖法等方法。
解析法首先需要建立微分方程模型。當微分方程的階數大于3時,響應分析會比較困難,往往需要轉換為傳遞函數模型。但它們的階數比較高時,用解析法建模和進行動態響應分析就會遇到困難,即存在求解高階微分方程的難題。同時傳遞函數只適用于描述單一輸入、單一輸出、初始條件為0的動態系統。而基于現代控制理論狀態空間法的狀態變量模型,完全克服了上述缺點和局限性,從理論上解決了多輸入、多輸出和非線性時變系統的動態分析問題,適應了研究高速、高精度復雜系統動態特性的需要。
鍵合圖是由美國H.M.Paynter于60年代初發明的,它以圖形方式來表達系統中各元件間的互相關系,能反映元件之間的負載效應及系統中的功率流動情況。助力器作為一種小液壓系統,從實質上看是功率的傳輸和轉換,系統的動態響應必然取決于系統間的動態功率交換。由功率鍵合圖可以直接寫出適于仿真的狀態方程,且與基于現代控制理論的狀態變量數學模型之間存在嚴密對應的內在邏輯關系,用這種方法為系統動態過程的分析和建模提供了很大的方便。
對助力器進行仿真分析,首要任務就是建立數學模型,最困難的也是建模,然后才可能進行計算機仿真研究,而建模是相當復雜的工作。模型的好壞直接關系到仿真的結果,不恰當的模型有可能得出相反的結論,從而造成巨大損失。
鑒于建模過程的復雜性以及給仿真研究帶來的不便,近幾年來國外陸續研制出一些更為實用的液壓機械仿真軟件,并獲得了成功的應用。AMESim就是其中杰出的代表。AMESim軟件采用的建模方法類似于功率鍵合圖法,但要更先進一些。相似之處在于二者都采用圖形方式來描述系統中各元件的相互關系,能夠反映元件間的負載效應及系統中功率流動情況,元件間均可反向傳遞數據。規定的變量一般都是具有物理意義的變量,都遵從因果關系;不同之處在于AMESim更能直觀地反映系統的工作原理。
AMESim為用戶提供了一個圖形化的時域仿真建模環境,用于工程系統建模、仿真和性能分析。該軟件不僅可以令使用者迅速達到建模仿真的最終目標,而且還可以分析和優化設計,降低開發的成本并縮短開發的周期,使工程設計人員從繁瑣的數學建模中解放出來,從而專注于物理系統本身的設計,不需要書寫程序代碼[3]。
因此,我們主要研究飛行操縱系統液壓助力器基于AMESim軟件建模與仿真分析的方法,即可解決助力器靜動態參數數字化分析的問題。
3 AMESim環境下的助力器建模
3.1 AMESim軟件使用方法
在AMESim環境下進行建模可以直接從在AMESim元件庫中調用現有的模型,也可以利用已有模型搭建自己所需要的超級元件模型。利用AMESim對系統進行建模仿真一般需要以下4個步驟:草圖模式、子模型模式、參數模式、運行模式。
1)草圖模式(Sketech mode)
從模型庫中選取需要的模塊來建立系統;在構建系統元件模型時,應當有一個整體的、概括性的思路,對系統各部分的功能有清晰的認識,就可以使用模型庫中相應的元件數學模型進行構建。
2)子模型模式(Submodels mode)
草圖模式完成后,進入子模型模式。在此模式中根據實際需要為每個元件選擇一個數學模型(給定合適的建模假設)。如果所搭建的系統不合理,不能按照AMESim的要求組成一個正常的循環,就不能進入子模型模式,一般可直接按默認情況,AMESim即為系統元件選擇默認的最簡子模型。
3)參數模式(Parameters mode)
直接點擊想要設置參數的元件圖標,即出現參數設置對話框,為每個元件子模型設置參數;在此模式下,AMESim可對系統進行編譯,編譯器產生包含系統參數的可執行文件,就可以對系統進行仿真。
4)運行模式(Run mode)
點擊運行模式圖標,即出現添加文字、運行參數、開始運行、停止運行模式,可以對仿真結果進行分析。
3.2 助力器模型建立
根據圖1和圖2所示的直升機飛行操縱系統液壓助力器的組成和原理,在AMESim中建立助力器整個系統的模型如圖4所示。其中控制閥元件使用超級元件進行了封裝。
首先在AMESim的草圖模式下建立液壓助力器的仿真模型。該系統主要由液壓缸、殼體、支撐剛度、不靈敏區、控制閥、信號源及增益等構成,其液壓機械部份是一個開關型閥控缸系統,從系統來看又是一個典型的閉環控制系統。如圖4所示,其工作原理為:用位移傳感器x將執行機構的位移轉換為信號并與給定的位移信號進行比較后形成閉環控制系統的誤差信號,所得到的差值通過比例放大后驅動控制閥動作,來控制液壓油供應的通、斷與方向,這樣就實現了對執行機構位移的大小和方向的控制。只要執行機構的輸出位移與給定的位移之間存在偏差,系統就可以自動調節輸出位移,直到誤差為0。
圖4中,用分段線性信號源和正弦信號源2來模擬執行機構(液壓缸)的負載阻力,期望位移信號由左端的分段線性信號源1來給定。
系統模型搭建完成后,在子模型模式(Submodels mode)中根據實際需要為每個模型選擇一個數學模型即子模型,在這里選擇最簡子模型。
我們以某型助力器為例,接下來在參數模式(Parameters mode)中為每個子模型設置參數。將誤差信號增益K3設為100;將5油液不靈敏區設為1cm3;液壓缸6a活塞直徑設為41mm,活塞桿直徑設為29mm;液壓缸6b活塞直徑設為41mm,活塞桿直徑設為20.5mm;液壓缸6c活塞直徑設為36mm,活塞桿直徑設為20.5mm;液壓缸6d活塞直徑設為36mm,活塞桿直徑設為0mm;設置助力器下腔殼體7a、上腔殼體7b的質量為0.3Kg,殼體和活塞之間的靜摩擦力為100N,滑動摩擦力為80N,響應死區為0.2mm,極限位移為±0.074m;將8a的連接剛度設為109N/m,衰減等級設為109N·s/m;將8b的連接剛度設為3.2×107N/m,衰減等級設為9.5×105N·s/m;將位移傳感器9的增益設為1。其余參數按默認值。
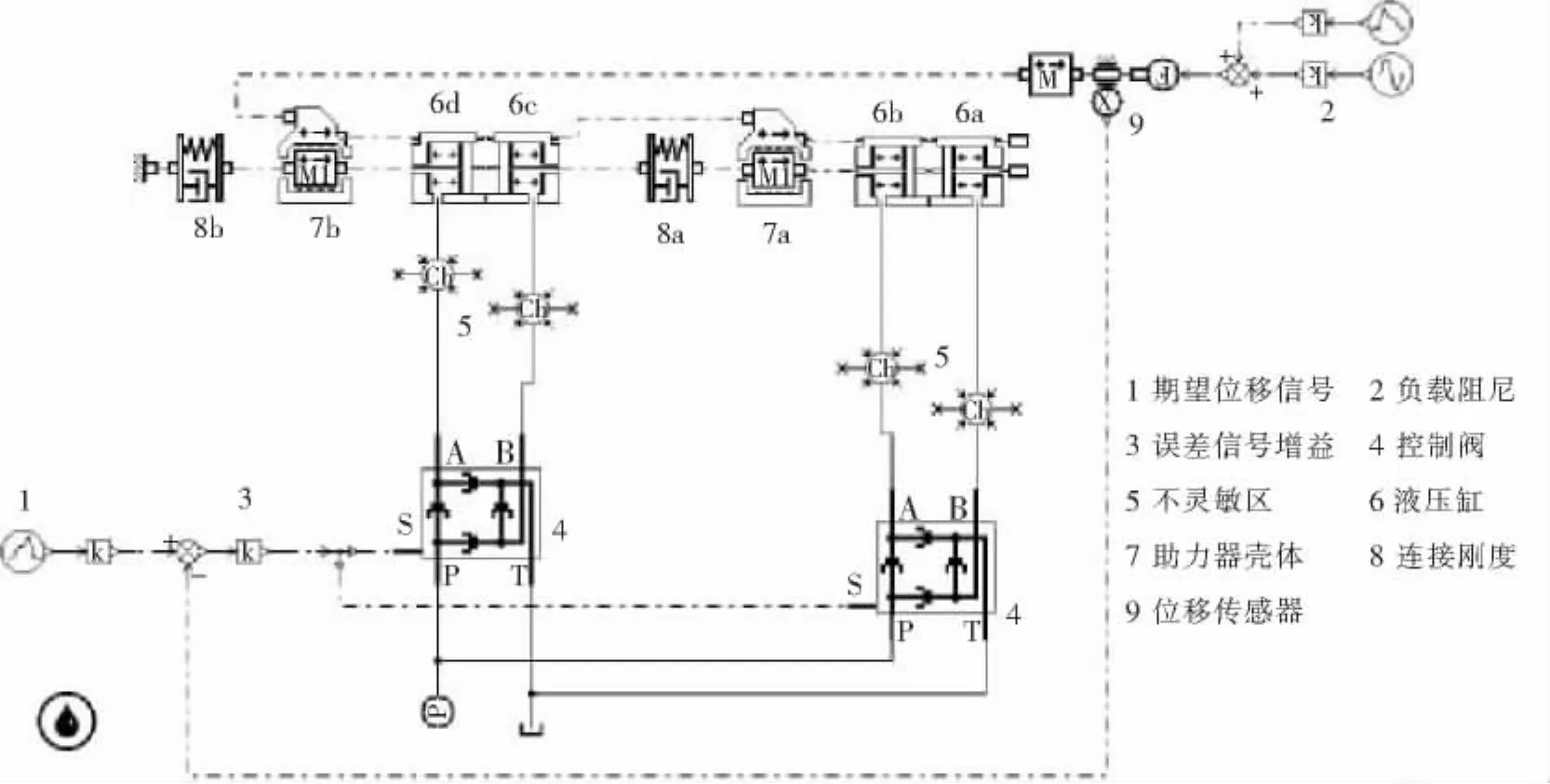
圖4 AMESim中的助力器系統模型
3.3 助力器數字仿真分析
助力器性能仿真分析分階躍響應分析和頻率響應分析,以判定其快速性、穩定性和跟隨性。
1)階躍響應分析
將給定的期望信號設置在0~0.074m之間,執行機構的位移也應在0~0.074m之間。將分段信號源設為在 0~0.1秒時為 0,0.1~1.0秒時為0.0028m的階躍信號,
系統所要求達到的性能評價指標為:輸出穩態誤差為0,超調量小于5%,調節時間小于70ms。由自控原理可知,前置放大器的放大倍數對系統的動態特性有較大的影響。調節前置放大器即增益3的大小,觀察質量塊M的實際輸出位移與所給定的期望值之差,找到滿足性能指標的范圍,最后在運行模式(Run mode)中的運行參數(Set the run parameters)中設置運行時間為 0.4s,采樣周期為 0.001s,點擊開始仿真(Star a simulation),得到仿真結果。
①負載為0時,將質量塊設為0.001Kg,信號源2設為0,以實現無負載仿真。給定的位移信號與質量塊實際位移的關系曲線如圖5、圖6和圖7所示。
由圖5~圖7可知:
系統的超調量為:P.O.=0;
調節時間為:tr<0.104s-0.1s=4ms;
系統的穩態誤差為:ess=0。
②帶負載模式,將質量塊設為100Kg,信號源2設為37000N,仿真。給定的位移信號與質量塊實際位移的關系曲線如圖8和圖9所示。
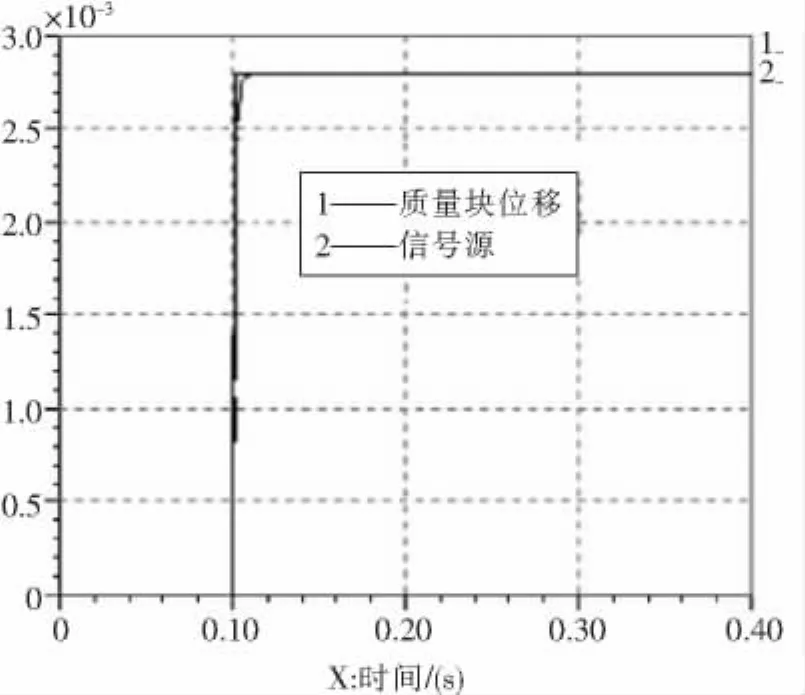
圖5 無負載輸入輸出階躍響應曲線
由圖8、圖9可知:
系統的超調量為:P.O.=0;
調節時間為:0.0028×95%=0.00266<0.00266221,tr<0.147s-0.1s=47 ms;
系統的穩態誤差為:ess=0。
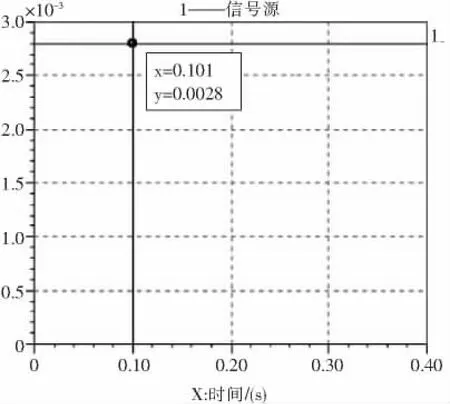
圖6 輸入階躍信號曲線
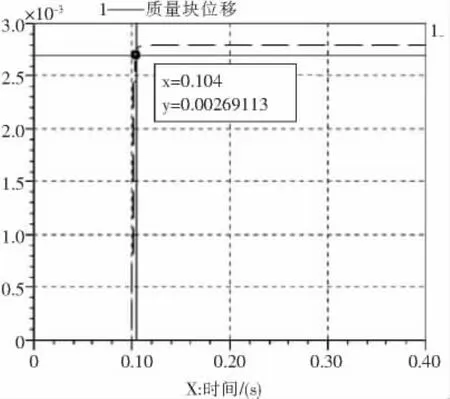
圖7 輸出階躍響應曲線

圖8 帶負載輸入輸出階躍響應曲線
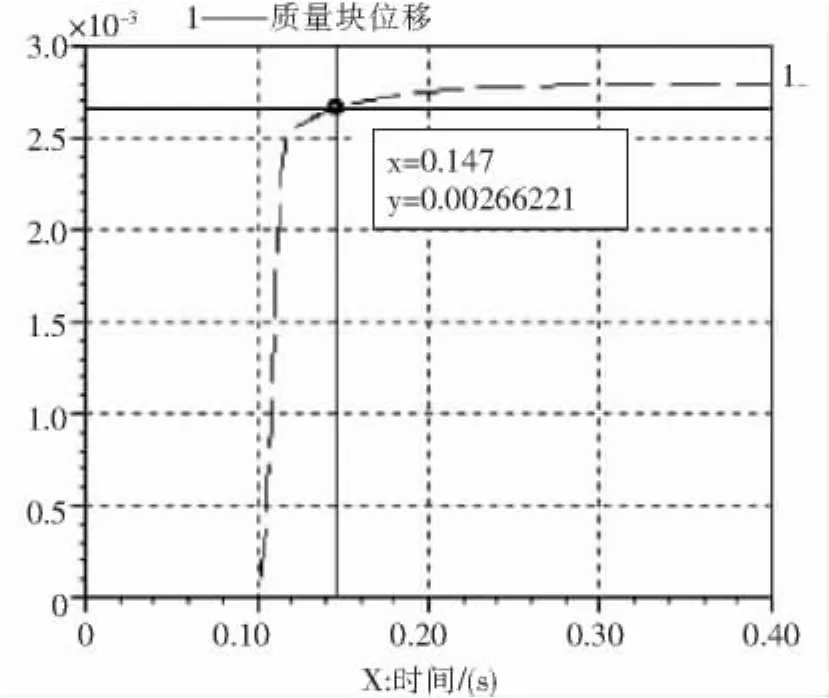
圖9 輸出階躍響應曲線
2)頻率特性分析
保持參數不變,將給定的期望信號設置為幅值±3(±0.2)mm,頻率為3Hz,負載信號源2設為0。
系統所要求達到的性能評價指標為:輸出相位差小于25°,輸出幅值比大于-2db。仿真結果如圖10、圖11和圖12所示:
由圖10~圖12可知:
輸入幅值:A1=2.99994mm;
輸出幅值:A2=2.99343mm;
頻率:f=3Hz,T==0.333s;
輸出相位差:Δt=0.087 -0.083=4ms,θ =Δt×360°/T=4ms×360°×3Hz=4.32°;
輸出幅值比:20×lg(A2/A1)= -0.01887 db。
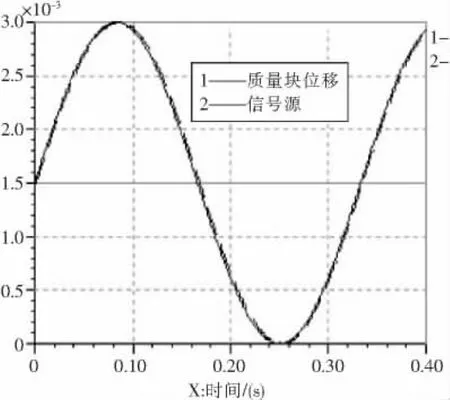
圖10 輸入輸出信號對比
3.4 助力器試驗結果
仿真的某型助力器地面測試試驗結果如下:
1)階躍響應
階躍信號發生時間:t1=0.012s。
①無負載:
系統的超調量為:P.O.=0;
調節時間為:tr=0.069s-t1=57ms。
②帶負載:
系統的超調量為:P.O.=0;
調節時間為:tr=0.182s-t1=170ms。
2)頻率特性
輸入幅值:A1=3.04mm;
輸出幅值:A2=2.6mm;
頻率:f=3Hz,T==0.333s;
輸出相位差:Δt=18ms,θ=Δt×360°/T=18ms×360°×3Hz=19.5°;
輸出幅值比:20×lg(A2/A1)= -1.358db。

圖11 輸出信號幅值測定

圖12 輸入信號幅值測定
3.5 結果對比
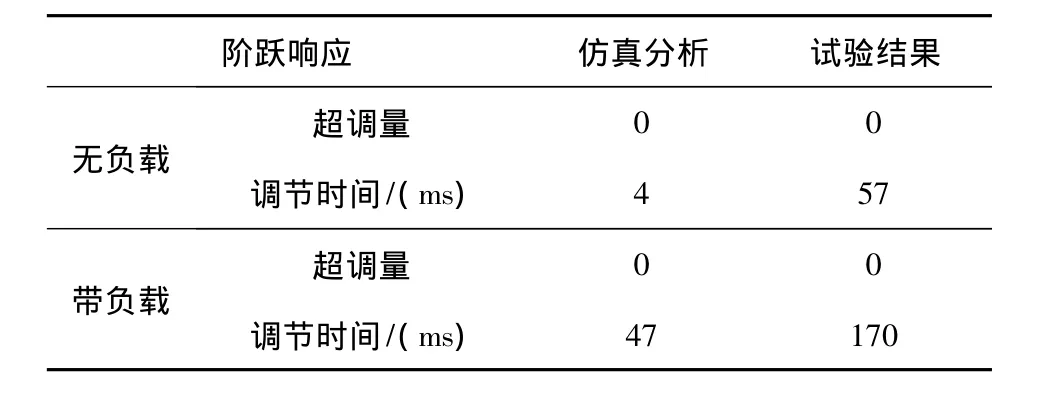
表1 階躍響應對比
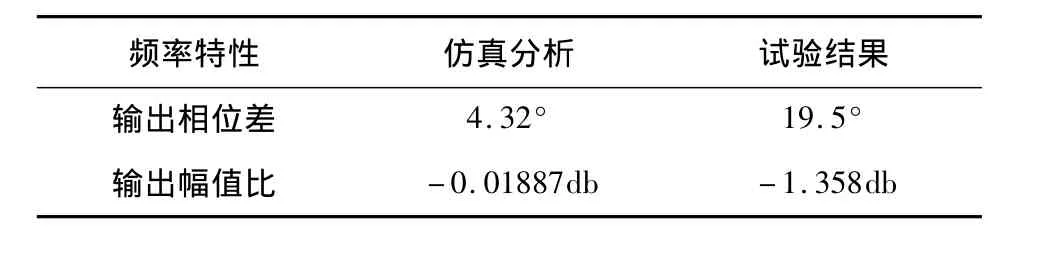
表2 頻率特性對比
4 結論
將仿真結果與試驗結果對比(表1、表2)分析表明仿真結果與試驗結果趨勢一致,差別在于助力器模型的分配閥的特性、油液性質、溫度、死區和內部摩擦沒有實測數據,用的是教材經典數據。因此所建立的基于AMESim的建模仿真分析方法比較準確地反映了助力器系統本身的性能,能夠滿足直升機液壓助力器數字化仿真分析的需求,仿真結果可以為直升機飛行操縱系統液壓助力器打樣設計和結構優化提供理論分析依據,具有很好的應用前景。
[1]張呈林,張曉谷,郭士龍.直升機部件設計[M].航空專業教材審查組,1986.
[2]李永堂,雷步芳.液壓系統建模與仿真[M].北京:北京冶金工業出版社,2003.
[3]劉海麗.基于AMESim的液壓系統建模與仿真技術研究[D].西北大學碩士學位論文,2006.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19