兆瓦級(jí)風(fēng)電齒輪箱遠(yuǎn)程實(shí)時(shí)在線測(cè)試及評(píng)價(jià)
2012-09-15 10:22:52朱才朝徐向陽(yáng)
振動(dòng)與沖擊 2012年20期
關(guān)鍵詞:振動(dòng)
朱才朝,胥 良,馬 飛,徐向陽(yáng),陳 爽
(1.重慶大學(xué) 機(jī)械傳動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,重慶 400030;2.重慶望江工業(yè)有限公司,重慶 400071)
風(fēng)電齒輪增速箱作為風(fēng)力發(fā)電機(jī)組的關(guān)鍵組件之一,其振動(dòng)特性將直接影響整個(gè)風(fēng)力發(fā)電機(jī)組的各項(xiàng)性能。Kahraman等[1]利用振動(dòng)測(cè)試的方法研究了在間隙、周期時(shí)變參數(shù)和外部激勵(lì)聯(lián)合作用下齒輪副系統(tǒng)的非線性動(dòng)態(tài)響應(yīng),并驗(yàn)證了躍遷現(xiàn)象、亞諧波共振和混頻現(xiàn)象的存在;Luisa等[2]為瞬變風(fēng)速下風(fēng)力發(fā)電機(jī)的振動(dòng)信號(hào)設(shè)計(jì)了一種等角度重采樣算法,結(jié)果表明對(duì)勻變速運(yùn)動(dòng)下的風(fēng)機(jī)主軸振動(dòng)信號(hào)是適用的[2];徐向陽(yáng)等[3]以錘擊法為基礎(chǔ)建立了一套齒輪箱固有特性測(cè)試系統(tǒng),分別研究了小傾角和大功率船用齒輪箱的動(dòng)態(tài)特性。目前,國(guó)內(nèi)外對(duì)風(fēng)電場(chǎng)風(fēng)模型進(jìn)行了相關(guān)研究,并利用異步交流電機(jī)模擬風(fēng)輪建立實(shí)驗(yàn)室環(huán)境下的風(fēng)力機(jī)模擬平臺(tái)和風(fēng)電齒輪箱室內(nèi)臺(tái)架測(cè)試試驗(yàn)臺(tái)[4-7],但是實(shí)驗(yàn)室環(huán)境終究不能完全準(zhǔn)確模擬風(fēng)場(chǎng)隨機(jī)時(shí)變風(fēng)載,故開(kāi)展風(fēng)場(chǎng)中風(fēng)機(jī)振動(dòng)特性的實(shí)時(shí)在線測(cè)試研究顯得十分必要[8-9]。
論文對(duì)風(fēng)電齒輪箱遠(yuǎn)程在線振動(dòng)測(cè)試分析討論,對(duì)某兆瓦級(jí)風(fēng)電齒輪箱進(jìn)行實(shí)時(shí)在線測(cè)試和評(píng)價(jià),為兆瓦級(jí)風(fēng)電齒輪箱設(shè)計(jì)開(kāi)發(fā)和動(dòng)態(tài)性能優(yōu)化提供依據(jù)。
1 兆瓦級(jí)風(fēng)電齒輪箱基本結(jié)構(gòu)及傳動(dòng)原理
某2.0 MW水平軸風(fēng)力發(fā)電機(jī)組主要性能參數(shù)如表1所示,該風(fēng)機(jī)主軸采用單軸承支撐,其配置的風(fēng)電齒輪箱采用一級(jí)行星+兩級(jí)平行軸齒輪傳動(dòng)形式,其傳動(dòng)系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖如圖1(a)所示,傳動(dòng)系統(tǒng)三維實(shí)體裝配模型如圖1(b)所示。圖中太陽(yáng)輪s、行星輪p和內(nèi)齒圈r構(gòu)成行星級(jí)齒輪副,行星級(jí)內(nèi)齒圈固定,行星架與主軸采用鎖緊盤連接構(gòu)成行星級(jí)輸入端;太陽(yáng)輪軸與傳動(dòng)軸Ⅲ通過(guò)內(nèi)花鍵連接構(gòu)成行星級(jí)的輸出端,行星齒輪采用柔性銷軸支撐;齒輪1和齒輪2構(gòu)成中間級(jí)齒輪副,齒輪3和齒輪4組成高速級(jí)齒輪副;行星級(jí)為斜齒輪內(nèi)嚙合傳動(dòng),中間級(jí)和高速級(jí)為斜齒輪外嚙合傳動(dòng)。
風(fēng)能帶動(dòng)葉片軸旋轉(zhuǎn),運(yùn)動(dòng)和動(dòng)力通過(guò)主軸Ⅰ傳遞給齒輪箱行星架,經(jīng)過(guò)齒輪箱行星級(jí)和兩平行級(jí)增速后,由軸Ⅴ輸出高轉(zhuǎn)速小扭矩運(yùn)動(dòng),軸Ⅴ通過(guò)彈性聯(lián)軸器帶動(dòng)發(fā)電機(jī)轉(zhuǎn)子旋轉(zhuǎn),發(fā)電機(jī)將旋轉(zhuǎn)機(jī)械能轉(zhuǎn)換為電能輸出。齒輪箱傳動(dòng)系統(tǒng)主要性能結(jié)構(gòu)參數(shù)如表2所示。?

表1 風(fēng)機(jī)性能參數(shù)Tab.1 Performance parameters of wind turbine

圖1 風(fēng)電齒輪箱出動(dòng)系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖Fig.1 Transmission system of wind turbine gearbox

表2 兆瓦級(jí)風(fēng)電齒輪箱傳動(dòng)系統(tǒng)結(jié)構(gòu)參數(shù)Tab.2 Structural parameters of the megawatt level wind turbine
2 兆瓦級(jí)風(fēng)電齒輪箱遠(yuǎn)程在線實(shí)時(shí)測(cè)試方法
由于風(fēng)電齒輪箱特殊的工作環(huán)境,傳統(tǒng)的近距離在線測(cè)試方法對(duì)其不再適用。目前,國(guó)內(nèi)外正在積極研發(fā)適用于兆瓦級(jí)風(fēng)電齒輪箱遠(yuǎn)程在線監(jiān)測(cè)的測(cè)試系統(tǒng),如瑞典SKF公司的WindCon狀態(tài)監(jiān)測(cè)系統(tǒng)和新疆風(fēng)能有線責(zé)任公司開(kāi)發(fā)的“通用風(fēng)電場(chǎng)遠(yuǎn)程監(jiān)控系統(tǒng)”。論文基于WindCon智能采集單元組建一套風(fēng)機(jī)遠(yuǎn)程在線實(shí)時(shí)監(jiān)測(cè)系統(tǒng)。
2.1 遠(yuǎn)程實(shí)時(shí)在線測(cè)試方法
圖2所示為風(fēng)電齒輪箱遠(yuǎn)程在線測(cè)試方法,由信號(hào)拾取裝置、信號(hào)遠(yuǎn)程傳送裝置和信號(hào)在線監(jiān)控和儲(chǔ)存裝置。安裝在齒輪箱上的振動(dòng)加速度傳感器與固定在機(jī)艙壁上的WindCon智能采集單元構(gòu)成信號(hào)拾取裝置,完成對(duì)齒輪箱特征信號(hào)的采集;智能采集單元通過(guò)直連網(wǎng)線將采集的數(shù)據(jù)傳送到固定在機(jī)艙外殼上的CDMA無(wú)線路由器,路由器以GPRS(通用分組無(wú)線服務(wù)技術(shù))方式將數(shù)據(jù)發(fā)射到Internet網(wǎng)絡(luò),借助Internet完成數(shù)據(jù)的遠(yuǎn)程傳送。遠(yuǎn)程傳送的通訊方式很大程度上決定了遠(yuǎn)程在線測(cè)試系統(tǒng)的穩(wěn)定性和可靠性,常用的通訊方式有現(xiàn)場(chǎng)總線、光纖通訊等有線通訊方式和GSM,GPRS、3G等無(wú)線通訊方式。

圖2 遠(yuǎn)程測(cè)試系統(tǒng)框圖和測(cè)試現(xiàn)場(chǎng)Fig.2 Diagram of remote experiment system and test site
2.2 振動(dòng)傳感器選擇及布置
兆瓦級(jí)風(fēng)電齒輪傳動(dòng)系統(tǒng)采用滾動(dòng)軸承支撐,齒輪箱中齒輪、軸或者軸承發(fā)生故障時(shí),其振動(dòng)信號(hào)經(jīng)過(guò)軸和軸承最終傳遞至箱體軸承座,所以在軸承座位置布置測(cè)點(diǎn),振動(dòng)信號(hào)的衰減和畸變最小[10-11],并且能夠全面反應(yīng)齒輪箱振動(dòng)性能。齒輪箱為三點(diǎn)(左、右側(cè)扭力臂及主軸軸承)支撐,為反映齒輪箱箱體支撐情況,在齒輪箱左、右側(cè)扭力臂處布置了測(cè)點(diǎn)[12]。此外,安裝齒輪箱的支撐臺(tái)架由偏航軸承支撐,塔筒晃動(dòng)和齒輪箱振動(dòng)均會(huì)導(dǎo)致支撐臺(tái)架的振動(dòng),影響齒輪箱的工作性能,故在支撐臺(tái)架上布置一個(gè)測(cè)點(diǎn)。除振動(dòng)測(cè)點(diǎn)外,在齒輪箱高速軸安裝電渦流傳感器采集高速軸轉(zhuǎn)速信號(hào);風(fēng)場(chǎng)風(fēng)速信號(hào)和發(fā)電機(jī)功率信號(hào)也一并接入采集儀。風(fēng)力發(fā)電機(jī)詳細(xì)測(cè)點(diǎn)布置如圖3所示。
風(fēng)機(jī)傳動(dòng)系統(tǒng)和支撐臺(tái)架采用彈性連接,傳動(dòng)系統(tǒng)高頻振動(dòng)衰減較快,且風(fēng)機(jī)主軸轉(zhuǎn)速較低,因此在測(cè)點(diǎn)7和測(cè)點(diǎn)8選用低頻加速度傳感器,頻響范圍為0.2~1 000 Hz;其余測(cè)點(diǎn)選用普通加速度傳感器,頻響范圍為1~10 000 Hz。
3 兆瓦級(jí)風(fēng)電齒輪箱遠(yuǎn)程實(shí)時(shí)在線測(cè)試
3.1 風(fēng)電齒輪箱實(shí)測(cè)工作工況
利用組建的遠(yuǎn)程在線測(cè)試系統(tǒng)對(duì)實(shí)際運(yùn)行的風(fēng)機(jī)在線連續(xù)監(jiān)測(cè)24小時(shí),測(cè)得風(fēng)場(chǎng)時(shí)變風(fēng)速和齒輪箱高速級(jí)轉(zhuǎn)速的時(shí)間歷程曲線如圖4所示。
3.2 風(fēng)電齒輪箱變風(fēng)載振動(dòng)測(cè)試

圖4 實(shí)測(cè)兆瓦級(jí)風(fēng)電齒輪箱工作工況曲線Fig.4 The measured curves of working conditions
測(cè)試現(xiàn)場(chǎng)圖如圖5所示,選取轉(zhuǎn)速較為穩(wěn)定且接近額定轉(zhuǎn)速的工作工況進(jìn)行分析,此時(shí)齒輪箱運(yùn)行工況為:高速軸轉(zhuǎn)速為1 725 r/min,發(fā)電機(jī)功率為1 015 Kw。該工況下風(fēng)電齒輪箱低速級(jí)行星架上風(fēng)向軸承座測(cè)點(diǎn)(測(cè)點(diǎn)1)及高速級(jí)輸出軸下風(fēng)向軸承座測(cè)點(diǎn)(測(cè)點(diǎn)5)的振動(dòng)加速度時(shí)域曲線和頻譜如圖6、圖7所示[13-14]。圖6、圖7 是在風(fēng)速相對(duì)穩(wěn)定,工況下測(cè)得,采樣幀時(shí)間較短(約為0.64 s),頻率分辨率約為1.5 Hz,無(wú)明顯的“譜涂抹”現(xiàn)象。此轉(zhuǎn)速下風(fēng)電齒輪箱各傳動(dòng)軸的轉(zhuǎn)頻和各級(jí)齒輪副的嚙合頻率如表3所示。

圖5 機(jī)艙內(nèi)信號(hào)拾取裝置測(cè)試現(xiàn)場(chǎng)圖Fig.5 Signal pick-up device in engine room
從圖6可以看出該工況下測(cè)點(diǎn)1(低速軸軸承座)的振動(dòng)加速度幅值整體上較小,如圖6和圖7所示。測(cè)點(diǎn)1的X、Y、Z方向的振動(dòng)頻率主要有134.375 Hz、603.125 Hz、1 206.25 Hz、1 810.938 Hz。這些頻率主要是由齒輪箱中間級(jí)嚙合頻率(134.82 Hz)、高速級(jí)嚙合頻率(603.75 Hz)及其倍頻引起。

圖6 測(cè)點(diǎn)1振動(dòng)加速度時(shí)域曲線及其頻譜Fig.6 Vibration acceleration domain curves and spectral of measuring point 1

表3 風(fēng)電齒輪箱轉(zhuǎn)頻和嚙合頻率Tab.3 Rotational frequency and meshing frequency of the wind turbine gearbox
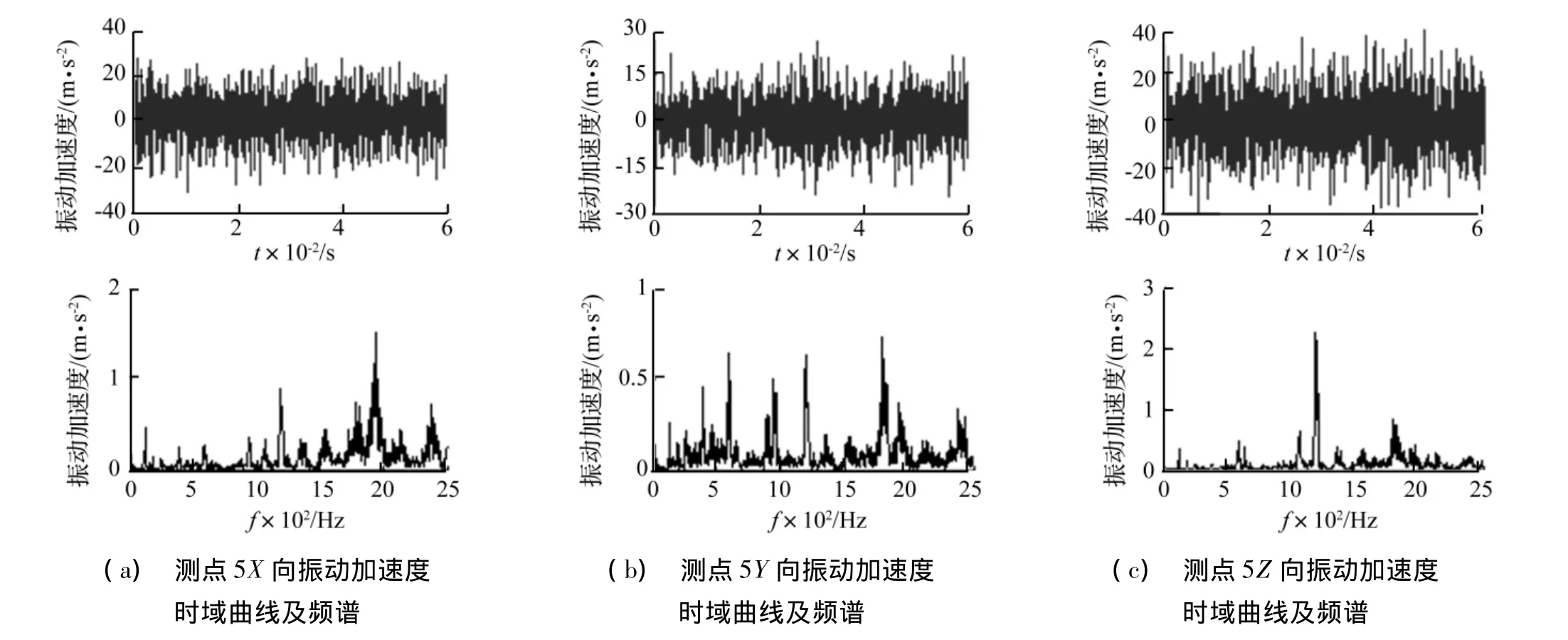
圖7 測(cè)點(diǎn)5振動(dòng)加速度時(shí)域波形及頻譜Fig.7 Vibration acceleration domain curves and spectral of measuring point 5
從圖7可以看出,該工況下測(cè)點(diǎn)5(高速軸軸承座)在Z(軸向)向的振動(dòng)加速度最大,X(水平方向)向的振動(dòng)加速度次之,Y(豎直方向)向的振動(dòng)加速度最小,測(cè)點(diǎn)5在X方向上的振動(dòng)頻率主要有1 206.25 Hz、1 810.938 Hz;在Y方向上的振動(dòng)頻率主要有134.375 Hz、603.125 Hz、1 206.25 Hz、1 810.938 Hz;在 Z 方向上的振動(dòng)頻率主要有 1 206.25 Hz、1 810.938 Hz。這些頻率主要是由齒輪箱中間級(jí)嚙合頻率(134.82 Hz)及其倍頻、高速級(jí)嚙合頻率(603.75 Hz)及其倍頻引起。
圖8為測(cè)點(diǎn)5振動(dòng)加速度信號(hào)的細(xì)化譜、自功率譜、倒頻譜以及測(cè)點(diǎn)1與測(cè)點(diǎn)5的相干系數(shù)[15-17]。從細(xì)化譜圖8(a)可以看出在高速級(jí)嚙合頻率處存在邊頻帶,調(diào)制頻率約為6Hz,正好為此轉(zhuǎn)速下的中間軸轉(zhuǎn)頻5.86 Hz(細(xì)化譜頻率分辨率約為0.25 Hz),倒頻譜圖8(c)也反映了此調(diào)制現(xiàn)象;圖8(b)所示自功率譜可以看出測(cè)點(diǎn)五的振動(dòng)峰值較大頻率主要是在高速級(jí)嚙合頻率603.75 Hz及其倍頻處;圖8(d)所示測(cè)點(diǎn)1Z向和測(cè)點(diǎn)5Z向振動(dòng)加速度信號(hào)相干系數(shù),可以看出兩信號(hào)在高速級(jí)嚙合頻率外的相干最大,約為0.87,因此高速級(jí)齒輪副的嚙合振動(dòng)對(duì)低速端的振動(dòng)有一定影響。

圖8 測(cè)點(diǎn)5振動(dòng)加速度信號(hào)分析Fig.8 The analyze for vibration acceleration of measuring point 5

表4 各測(cè)點(diǎn)振動(dòng)速度均方根值及振動(dòng)烈度Tab.4 The RMS of vibration of each measuring point and vibration strength of wind turbine gearbox
4 兆瓦級(jí)風(fēng)電齒輪箱實(shí)時(shí)在線振動(dòng)強(qiáng)度評(píng)價(jià)
振動(dòng)強(qiáng)弱程度用當(dāng)量振動(dòng)烈度參數(shù)Vs來(lái)表示,其意義為所有測(cè)點(diǎn)三個(gè)正交方向上振動(dòng)速度有效值的向量和的模。其定義公式為:

式中:Vs為當(dāng)量振動(dòng)烈度,mm/s;Vxi、Vyi、Vzi為各測(cè)點(diǎn)在水平、豎直和軸向的振動(dòng)速度有效值,mm/s;Nx、Ny、Nz為同一工況下水平、豎直和軸向的測(cè)點(diǎn)數(shù)。
按公式(1)計(jì)算得到各轉(zhuǎn)速下風(fēng)電齒輪箱的振動(dòng)強(qiáng)度值如表4所示。由于該風(fēng)電齒輪箱扭力臂采用彈性支撐,選取標(biāo)準(zhǔn)“在非旋轉(zhuǎn)部件上測(cè)量和評(píng)價(jià)機(jī)器的機(jī)械振動(dòng)”中撓性支撐A級(jí)和B級(jí)的分界線2.3 mm/s作為評(píng)價(jià)標(biāo)準(zhǔn)值。從表4可以看出,風(fēng)電齒輪箱在不同轉(zhuǎn)速下的當(dāng)量振動(dòng)烈度均小于2.3 mm/s,達(dá)到A級(jí)水平。
從表4可以看出,主軸軸承(測(cè)點(diǎn)7)和行星架上風(fēng)向軸承(測(cè)點(diǎn)1)軸向的振動(dòng)能量大于徑向振動(dòng)能量;齒輪箱扭力臂(測(cè)點(diǎn)2)以及支撐臺(tái)架系統(tǒng)(測(cè)點(diǎn)8)豎直方向的振動(dòng)能量大于水平方向的振動(dòng)能量;齒輪箱高速端(測(cè)點(diǎn)5)三個(gè)方向振動(dòng)能量相差不大。

圖9 不同轉(zhuǎn)速下風(fēng)電齒輪箱各測(cè)點(diǎn)振動(dòng)速度有效值Fig.9 The RMS of vibration of each measuring point in different speed
在不同轉(zhuǎn)速下兆瓦級(jí)風(fēng)電齒輪箱測(cè)點(diǎn)1(低速軸軸承座)、測(cè)點(diǎn)2(右側(cè)扭力臂)和測(cè)點(diǎn)5(高速軸軸承座)的振動(dòng)速度有效值如圖9所示。從圖9可以看出,齒輪箱扭力臂的振動(dòng)能量最大,振動(dòng)速度有效值達(dá)到1.79(mm·s-1),高速端振動(dòng)能量次之,低速端振動(dòng)能量最小,由于扭力臂幾乎承受齒輪箱的全部質(zhì)量,運(yùn)行過(guò)程中各方面的慣性力和反作用力對(duì)扭力臂的影響較為明顯。
5 結(jié)論
對(duì)某兆瓦級(jí)風(fēng)電齒輪箱的基本結(jié)構(gòu)和傳動(dòng)原理進(jìn)行分析,建立風(fēng)電齒輪箱實(shí)際時(shí)變風(fēng)載下振動(dòng)特性遠(yuǎn)程在線測(cè)試系統(tǒng),詳細(xì)分析風(fēng)機(jī)遠(yuǎn)程在線測(cè)試方法。測(cè)試得到風(fēng)電齒輪箱時(shí)變風(fēng)載下的振動(dòng)特性數(shù)據(jù)對(duì)其振動(dòng)強(qiáng)度進(jìn)行分析。表明該齒輪箱振動(dòng)的主要振動(dòng)頻率為中間級(jí)嚙合頻率、高速級(jí)嚙合頻率及其倍頻;高速級(jí)嚙合頻率及其倍頻受中間軸轉(zhuǎn)頻調(diào)制;齒輪箱各測(cè)點(diǎn)所受軸向方向的沖擊力大于徑向沖擊力;就各測(cè)點(diǎn)振動(dòng)強(qiáng)度而言,兆瓦級(jí)風(fēng)電齒輪箱扭力臂的振動(dòng)強(qiáng)度最大,振動(dòng)速度有效值達(dá)到1.79(mm·s-1)、高速軸軸承座的振動(dòng)強(qiáng)度次之、低速軸軸承座的振動(dòng)強(qiáng)度最小;就整個(gè)齒輪箱而言,兆瓦級(jí)風(fēng)電齒輪箱實(shí)際運(yùn)行工況下的當(dāng)量振動(dòng)烈度(綜合振動(dòng)強(qiáng)度)為1.49(mm·s-1),小于2.3(mm·s-1),振動(dòng)達(dá)到 A 級(jí)水平。
[1]Kahraman A,Blankenship G W.Experiments on nonlinear dynamicbehaviorofan oscillatorwith clearance and periodically time-varying parameters[J].Journal of Applied Mechanics,Transactions ASME,1997,64(1):217 -226.
[2]Villa L F,Renone A,Peran J R,et al.Angular resampling for vibration analysis in wind turbines under non-linear speed fluctuation[J].Mechanical Systems and Signal Processing,2011,25:2157-2168.
[3]徐向陽(yáng),朱才朝,張曉蓉,等.大功率船用齒輪箱試驗(yàn)?zāi)B(tài)分析[J].振動(dòng)與沖擊,2011,30(7):266 -270.XU Xiang-yang,ZHU Cai-chao,ZHANG Xiao-rong,et al.Experimental modal analysis of heavy duty marine gearbox[J].Journal of Vibration and Shock,2011,30(7):266-270.
[4]Landber L.Short-term prediction of local wind conditions[J].Journal of Wind Engineering and Industrial Aerodynamics,2001,22(89):235 -245.
[5]Farret F A,Gules R,Marian J.Micro turbine simulator based on speed and torque of a DC motor to drive actually loaded generators[J].IEEE Iccdcs,1995,21(11):89 -93.
[6]Slootweg J G,Kling W L,Polinder H.Dynamic modeling of a wind turbine with double-fed generator[J].IEEE Trans.Energy Conversion,2001,56(11):644 -649.
[7]苗 宏.風(fēng)機(jī)整機(jī)試驗(yàn)臺(tái)測(cè)控系統(tǒng)的研制[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[8]Murai M.Nishimura R.A study on an experiment of behavior of a SPAR type offshore wind turbine considering rotation of wind turbine blades.OCEANS'10 IEEE Sydney [J].IEEE Computer Society,2010.
[9]Krouse J.Wind turbine gearbox vibration [J].Power Engineering,2009,113(10):16 -17.
[10]Aprpecido C G,Rodrigo C C,Daniel F L.Vibration and wear particles analysis in test stand[J].Industrial Lubrication and Tribology,2007,59(5):209 -216.
[11]李 輝,鄭海起,楊紹普.基于幅值和相位解調(diào)分析的齒輪箱啟動(dòng)過(guò)程故障診斷[J].振動(dòng)與沖擊,2008,27(2):8 -11.LI Hui, ZHENG Hai-qi, YANG Shao-pu. Gearfault diagnosis based on amplitude and demodulation during run-up[J].Journal of Vibration and Shock,2008,27(2):8 -11.
[12]Ebersbach S,Peng Z,Kessissoglou N J.The investigation of the condition and faults of a spur gearbox using vibration and wear debris analysis techniques[J].Wear,2006(1/2):19 - 24.
[13]Kia S H,Henao H,Caploino G A.Analytical and experimental study of gearbox mechanical effect on the induction machine stator current signature[J].IEEE Transactions on Industry Applications,2009,45(4):1405 -1415.
[14]Varkonyi-Koczy A R.Fast anytime fuzzy fourier estimation of multiline signals[J].IEEE Transactions on Instrumentation and Measurement,2009,58(5):1763 - 1770.
[15]Shen Y Y.The comprehensive experimental design of digital signal processing based on matlab[J].Research and Exploration in Laboratory,2009,28(8):60 -73.
[16]Zeng H,Pang Y,F(xiàn)eng W J.Array signal processing model and simulation based on matlab[J].Computer Engineering and Applications,2008,44(9):68 -71.
[17]李 輝,鄭海起,唐力偉.齒輪箱升降速過(guò)程階次倒譜故障診斷方法研究[J].湖南科技大學(xué)學(xué)報(bào),2007,22(1):30 -33.LI Hui, ZHENG Hai-qi, TANG Li-wei. Study on order cepstrum diagnostic methods for gearbox during speed-up process[J]. Journal of Hunan University of Science&Technology:Natural Science Editon,2007,22(1):30-33.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00