基于CAN總線技術的汽車智能儀表設計
2012-09-01 02:10:18白月飛楊斌蘭州城市學院甘肅蘭州730070
中國建材科技 2012年5期
白月飛 楊斌(蘭州城市學院,甘肅 蘭州730070)
1 引言
電子制造業和微型計算機技術的不斷發展,這給車載智能儀表的研制和實現帶來了可能和機會。在現代汽車中越來越多的高科技技術運用在電子設備中,例如紅外探測防撞設備、剎車防抱死系統、倒車雷達、黑匣子等。這些設備使得汽車的安全性能越來越高,防護系統越來越完善。但是即使有了這些高科技電子設備,面對駕駛員的非正常操作以及外界的突發事故,這些高科技系統顯得捉襟見肘。因為沒有一個綜合的系統對汽車運行狀況進行監測,以及對數據進行處理和判斷,在隱患面前做出報警和糾正不正確駕駛。為了使汽車變得更加安全、可靠、節能,需要駕駛員對汽車各部分運行的狀況的信息全面的掌握,傳統的機械儀表對汽車各部分的信息已不能全面的簡潔的做出顯示,因此汽車智能儀表是當今汽車儀表行業發展的趨勢。
2 汽車智能儀表總體結構設計
系統總體方案設計是對系統的整體結構、功能、可靠性、抗干擾性以及可實現性等信息進行分析整合,最后綜合的評估后得出的一套該系統最合理的方案。因此,該部分對整個后續的設計工作起著決定性的作用,決定了設計的周期,難度,費用,以及成敗都是至關重要的。該章節的內容包括系統可實現功能的探討,硬件電路各器件的選擇分析和電路的設計方案,以及軟件的功能實現的分析等組成。
2.1 智能儀表的功能分析
1)運用智能車載數字儀表來對信息綜合的顯示,包括車速、發動機轉速、蓄電池電壓、燃油量、里程數等信息。
2)對汽車各個部分運行狀況參數和車載設備的工作情況實行監測,發現異常情況控制器會采取報警措施和強制性采取動作。實施自我防范的功能,避免了事故的進一步發生。報警提示一般是已報警圖標伴隨著不同燈光顏色的閃爍,以及配合著語音報警等。
3)用戶可以根據自己需要和習慣,選擇適合自己的風格的儀表界面,不管是顏色,圖形的大小,盤面的信息排列順序以及還可以對盤面信息進行刪減,使車載儀表更具個性化。
4)系統還具備外設和擴展接口,可進行數據下載和根據用戶的需求擴展相應的電子設備,例如電子地圖,倒車雷達等等。 在智能儀表的實現中,要遵循系統設計的準則。各個模塊都有著自己的準則,在遵循這些基本準則時又要求功能全部實現,因此該智能儀表顯示系統就必須劃分如下幾個方面:傳感器、總線傳輸、中央處理器、數據存儲、終端顯示以及可以用于外圍設備擴展的和數據下載的端口的幾個方面。為了實現這樣一個擁有信號采集、數據傳輸、數據處理、數據存儲、液晶顯示等多種功能的綜合系統,只有利用嵌入式實時操作系統,C/OS-II并且結合微控制器(MCU),使系統結構得以簡化,資源分配合理,操作簡潔,系統的工作穩定可靠且效率高。實時操作系統,C/OS-II還可以在汽車有突發事故或者安全故障時,及時的做出反應,并向駕駛員發出報警和及時的做出安全保護的動作。
2.2 智能儀表系統總體框架結構
智能儀表系統總體框架結構如圖1所示:中央控制器硬件共分為10個模塊:
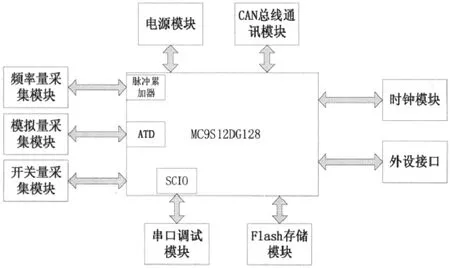
圖1 智能儀表系統總體框架結構
(1)中央處理器(MCU)(2)電源模塊(3)CAN通訊模塊(4)頻率量采集模塊(5)模擬量采集模塊(6)開關量采集模塊(7)時鐘模塊(8)外設接口擴展模塊(9)串口調試模塊(10)Flash存儲模塊。
3 系統硬件的分析
3.1 硬件總體方案的選擇
隨著科技的飛速發展和人民生活水平的逐步提高,人們對汽車性能的可靠性和駕駛舒適性的要求變得越來越高,為了滿足用戶的需求,越來越多的電子設備運用在汽車上。龐大的電子設備之間的信息交換,指令的傳遞,以及數據的采集處理和判斷都變得異常的復雜,隨之而來的車內空間的緊缺,眾多電子設備帶來的運行時故障率越來越高,維修的難度越來越大。為了能使信號在車內各個部分間傳遞,實現車內信息共享,對采集到的信息能夠及時的傳遞給處理器,并且能發出正確的指令,傳統控制器模塊和線束通訊模式己經遠遠不能滿足人們的需求,因此,高性能的處理器和CAN總線通訊應運而生。
本系統的中央處理器選用的是Motorola公司生產的MC9S12DG128這款16位的單片機。該處理器利用CAN總線通訊控制對各點的信息進行接收和發送。對接收到的數據進行格式轉換,然后進行分析和處理然后做出判斷,最后發出指令。在圖像顯示方面,完成對數據格式的轉換以及圖像的生成、處理和存儲,最終能綜合全面的在液晶顯示器上顯示車輛運行時的駕駛員所需要的各種車況信息。因此,對處理器的選擇至關重要,關系到車載電子系統的性能,當處理器的功能是夠強大時,單片機外圍電路以及軟件的設計會變得更加簡便,這樣系統的穩定性也越好。
在傳統的以單片機為控制器的系統中,傳感器檢測到信號后,經過多路開關和采樣保持器,最后用A/D轉換器模塊將模擬信號轉換成數字信號傳遞給單片機,經單片機邏輯計算、判斷、處理后,控制器對其它部分發出指令,該數字形式的控制量同樣經過D/A轉換器,轉換成模擬信號后傳遞給保持器,再發送給各個執行器件,一般主控單元電路中還附帶有簡單的數據顯示和報警功能的模塊。
3.2 現場總線控制模塊
現場總線主要是進行分布式控制,它主要運用在生產車間和各種電子設備之間,采用多節點串行數字化通訊系統,是以全數字化、開放式、多節點間通信為特點的底層控制網絡。它結合了當今三大高科技技術:現代計算機網絡技術、自動控制技術和通信技術。自從上世紀80年代以來,CAN逐步在加工制造業、交通管理、大型機械、汽車等擁有自動化控制系統中廣泛的運用。在眾多總線類型中,CAN(ControllerAreaNetwork)總線在局域網重工控制性能最好,協議最為規范,設計獨特,受到越來越多的關注,己經被規定為國際上總線的標準,被公認為運用最廣泛的現場總線之一。
1)現場總線的結構特點
現場總線突破了傳統的控制模式,以集散控制系統為基礎發展而來的。傳統的控制系統都是一對一進行連接,每一個控制點都必須要與主控器對接,現場的傳感器、控制器、測量變送器、開關、執行器都需要與控制室的主控器進行單獨連接。現場總線控制系統不拘于傳統的控制模式,設立了下位機,把控制室中的控制模塊以及輸入輸出模塊下放到現場,便于現場測量變送裝置更直接的與執行模塊進行數據傳輸,使控制功能在現場完成,實現現場分布式。
2)現場總線方式的優勢
1)設備維護簡便:在現場出現故障時,現場控制設備對故障具有處理和診斷能力,同時控制室也會收到診斷結果及信息。維護人員可以通過這些信息了解設備運行的情況以及故障診斷的信息,以便對設備進行維護,更快的排除故障,提高了成產效率,最主要是大大減少了維護人員對設備檢修時的工作量。
2)結構簡便,節省空間:很多生產車間的流水線,其周圍都分布著很多相關的輔助設備,走線更是凌亂無章,數量繁多,這就大大的占用了車間有限的空間,而運用了分布式控制后,總線的出現就很好的解決了這些問題,使輔助設備大大減少,最關鍵的是連線更簡便,節省空間,便于維護。
3)節約成本:一般的生產線距離都比較長,分布廣,傳統控制模式需要大量的連線將控制接口與執行設備一一連接。現在有了現場總線系統連線變得更加簡單,一條連線上可接多個設備,節省了電纜線和端口設備的數量,當需要擴展或者對流水線進行改進時,秩序從原來的連線上重新接一根控制線即可,而不需要重設端口和增加電子設備和電纜線,使生產變得更加靈活,壓低了成本和生產投入。
4 結 語
隨著汽車工業的發展,人們對汽車性能的可靠性和駕駛舒適性的要求變得越來越高,汽車電子智能化成為當前廣受關注的焦點。越來越多的電子設備裝載在汽車上,使得各模塊之間通訊變得復雜,系統運行的可靠性隨之降低。從不同單元傳輸過來的數據要處理,為了使系統達到具有儀表智能信息化、信息利用總線調度和共享、車載監控系統對故障進行顯示和診斷等功能,不僅要有強大的中央處理器作為基礎,而且還需要方便快捷的操作系統作為系統運行的平臺。
[1]鮑官軍,CAN總線技術、系統實現及發展趨勢,論文期刊,2003年1期,浙江工業大學學報。
[2]王建國,控制器局域網的協議分析及應用,2007年10期,情報科學
[3]王春燕,現場總線技術在智能家庭控制網絡中的應用,2006年5期,電氣自動化出處。
[4]黃彩虹,淺談現場總線技術在4L5線灌裝線上的應用,學位論文,2005年,中國科技信息。
[5」高杰,現場總線的現狀和發展出處,學術期刊,2006年6期,煤礦機械
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
電子制作(2018年11期)2018-08-04 03:26:08
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中華手工(2017年2期)2017-06-06 23:00:31
作文大王·低年級(2016年4期)2016-04-18 00:24:37
工業設計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
決策探索(2014年21期)2014-11-25 12:29:50
消費者報道(2014年7期)2014-07-31 11:23:57
祝您健康(1987年3期)1987-12-30 09:52:32