基于自適應(yīng)擴展卡爾曼濾波器的永磁同步電機超低速控制*
2012-08-28 06:50:22丁信忠張承瑞李虎修于樂華胡天亮
電機與控制應(yīng)用 2012年9期
關(guān)鍵詞:系統(tǒng)
丁信忠, 張承瑞,2, 李虎修, 于樂華, 胡天亮,2
(1.山東大學機械工程學院,山東濟南 250061;
2.山東大學高效潔凈機械制造教育部重點實驗室,山東濟南 250061;
3.山東大學控制科學與工程學院,山東濟南 250061)
0 引言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)精確的速度及位置反饋是實現(xiàn)高性能低速控制的重要保證。通常,借助軸向編碼器的采樣計數(shù)估算出電機的平均速度。但是,受到編碼器分辨率的限制,在超低速范圍,速度反饋信息容易丟失,如果通過延長采樣周期以保證速度分辨率,將降低速度環(huán)的帶寬,且過長的反饋延時將使伺服系統(tǒng)變得不穩(wěn)定。
目前,瞬時觀測器理論[1]和人工神經(jīng)網(wǎng)絡(luò)[2]被深入研究,并應(yīng)用于伺服系統(tǒng)狀態(tài)估計。基于瞬時觀測器理論的狀態(tài)估計方法能夠估計電機的瞬時狀態(tài),具有較好的實時性,但抗干擾能力不佳,在噪聲環(huán)境中,位置和速度檢測可能失效[3]。人工神經(jīng)網(wǎng)絡(luò)方法擺脫了對電機模型的依賴,具有良好的魯棒性,但需要大量樣本對神經(jīng)元的權(quán)值和偏置進行訓練,學習時間過長,而且網(wǎng)絡(luò)的穩(wěn)定性和收斂性的證明也比較困難[4]。擴展卡爾曼濾波器(Extended Kalman Filter,EKF)是一種最優(yōu)隨機狀態(tài)估計器,可對非線性時變系統(tǒng)的狀態(tài)進行在線估計,并具有較強的抗干擾和平滑噪聲能力,因而適用于非線性、強耦合且高噪聲的伺服驅(qū)動系統(tǒng)。隨著嵌入式計算技術(shù)的發(fā)展,EKF計算量大的問題已被良好解決。
本文提出了一種使用低精度編碼器條件下獲得PMSM良好低速性能的控制方法。其中,EKF用于對電機轉(zhuǎn)速、角位移和負載轉(zhuǎn)矩進行瞬時估計,并在估計過程中利用辨識出的敏感參數(shù)對估計器的狀態(tài)矩陣進行迭代修正,以保證估計器在多種工況下均可獲得滿意的估計結(jié)果。估計出的電機瞬時轉(zhuǎn)速和位置值替代編碼器檢測值進行伺服閉環(huán)控制,由此保證電機低速運行下的轉(zhuǎn)速和位置反饋精度。為驗證該方法的有效性,本文設(shè)計仿真和試驗與使用改進型M/T速度檢測方法[5]下的低速控制性能進行了對比。
1 EKF瞬時狀態(tài)估計器
1.1 估計器建模
在未飽和狀態(tài)下,PMSM的電壓方程為
式中:iα、iβ、uα和uβ——分別為定子電流、電壓在Clarke坐標系下α、β軸的分量;
Rs——定子相電阻;
Ls——等效同步電感;
ψf——永磁體基波磁鏈;
ωe——轉(zhuǎn)子電角速度;
θe——電角位移。
轉(zhuǎn)子和所帶負載組成機械子系統(tǒng),根據(jù)牛頓定律,可得PMSM的轉(zhuǎn)矩平衡方程為

式中:np——電機極對數(shù);
J——系統(tǒng)轉(zhuǎn)動慣量,其中包括電機轉(zhuǎn)子及負載折算到電機軸上的轉(zhuǎn)動慣量;
B——黏滯摩擦系數(shù);
Te——電機輸出的電磁轉(zhuǎn)矩;
Tl——等效負載轉(zhuǎn)矩,其中包括負載轉(zhuǎn)矩以及由于黏滯摩擦系數(shù)非線性變化、電流給定偏差等因素造成的轉(zhuǎn)矩波動。
由于電流環(huán)的采樣頻率遠高于等效負載轉(zhuǎn)矩變化的頻率,故可認為負載轉(zhuǎn)矩在一個采樣周期內(nèi)保持不變,即

聯(lián)合式(1)~式(4),得到狀態(tài)估計器的狀態(tài)方程和輸出方程,即

式中:x——狀態(tài)矢量,即預估計量;
u——輸入矢量;
y——輸出矢量。
狀態(tài)函數(shù)f(x)是狀態(tài)矢量和輸入矩陣的耦合項。
實際系統(tǒng)中,需要考慮由于估計模型不準確和外界干擾等不利因素造成的影響,因此在EKF的狀態(tài)方程和輸出方程中分別引入系統(tǒng)噪聲矩陣V和測量噪聲矩陣W,并將估計方程離散化以便用于數(shù)字控制系統(tǒng),可得

式中:x(k)、u(k)、y(k)和f[x(k)]——分別為狀態(tài)矢量、輸入矢量、輸出矢量和狀態(tài)函數(shù)的離散形式;
V(k)和W(k)——分別為離散化的系統(tǒng)噪聲矢量和測量噪聲矢量。
通常,系統(tǒng)噪聲和測量噪聲為零均值高斯白噪聲,由此可得到EKF算法中需要的噪聲協(xié)方差對角矩陣Q和R,即

式中:Qi——定子電流系統(tǒng)噪聲協(xié)方差值;
Qω、Qθ和QT——分別為轉(zhuǎn)子電角速度、電角位移和負載轉(zhuǎn)矩的系統(tǒng)噪聲協(xié)方差值;
Ri——定子電流測量噪聲協(xié)方差值;
Rθ——轉(zhuǎn)子電角位移測量噪聲協(xié)方差值。綜合以上各式,即得到用于EKF伺服系統(tǒng)狀態(tài)估計的狀態(tài)模型。
1.2 EKF狀態(tài)估計與魯棒性分析
基于EKF的伺服系統(tǒng)狀態(tài)估計是由第k次的估計結(jié)果(k)來獲得第k+1次的估計結(jié)果,即由當前的系統(tǒng)狀態(tài)來估計下一周期的狀態(tài),從而解決了M/T速度檢測方法速度反饋滯后一個周期的問題,加之算法中綜合考慮了系統(tǒng)噪聲和測量噪聲的影響,因此可以為伺服閉環(huán)控制系統(tǒng)提供實時、準確的狀態(tài)反饋,有助于提高伺服系統(tǒng)的動、靜態(tài)性能。
估計過程分為預測和校正兩大階段,通過以下遞推過程[6]逼近系統(tǒng)真實狀態(tài):
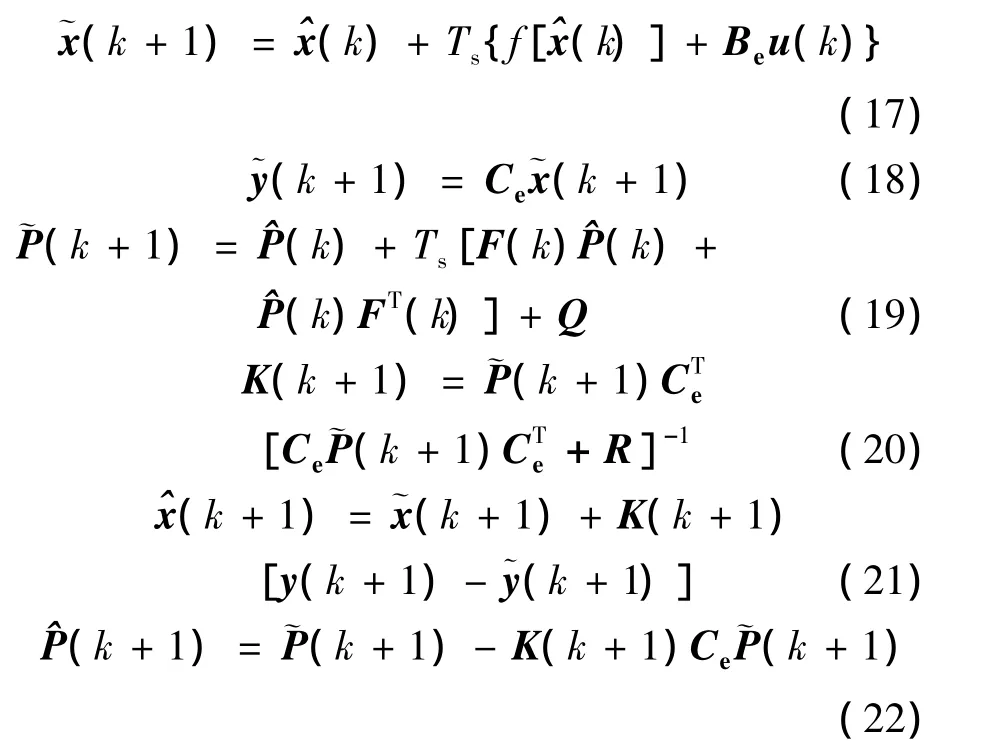

經(jīng)過以上6個步驟的遞推計算,即可得到本周期內(nèi)的狀態(tài)矢量中的預估計變量值,基于EKF的伺服系統(tǒng)狀態(tài)估計過程如圖1所示。
式中:Ts——電流環(huán)采樣周期;
?
P?(k)和P^(k)——分別為預測協(xié)方差矩陣和估計協(xié)方差矩陣。
F(k)為梯度矩陣,定義如下:

圖1 離散擴展卡爾曼濾波器結(jié)構(gòu)圖
當電動機在零速附近運行時,繞組電壓將降到很低,此時電機定子電阻、等效電感及系統(tǒng)轉(zhuǎn)動慣量J等因素將對系統(tǒng)動態(tài)模型產(chǎn)生主要影響,從而影響EKF的估計效果。但是,EKF的系統(tǒng)模型中綜合了定子電流采樣這一因素,在超低速區(qū)域,霍爾電流傳感器依舊可以提供準確的電流反饋,從而彌補了繞組電壓過低產(chǎn)生的影響。當負載轉(zhuǎn)動慣量變化時,EKF的動態(tài)性能將相對降低,文獻[7]中指出,無法將轉(zhuǎn)動慣量變化引起的轉(zhuǎn)矩脈動等價到等效負載轉(zhuǎn)矩Tl中,通過轉(zhuǎn)矩前饋加以改善,且無法通過調(diào)整系統(tǒng)噪聲矩陣中轉(zhuǎn)矩協(xié)方差值QT來減小轉(zhuǎn)動慣量變化對估計精度的影響。
為解決上述問題,在伺服系統(tǒng)狀態(tài)估計中,需要對系統(tǒng)的轉(zhuǎn)動慣量進行在線辨識,并根據(jù)辨識結(jié)果對EKF的狀態(tài)方程系數(shù)矩陣進行在線參數(shù)自整定。
2 轉(zhuǎn)動慣量在線辨識
對于表貼型永磁同步電機,將式(3)所示的轉(zhuǎn)矩平衡方程改寫為

式中:ωm——轉(zhuǎn)子機械角速度;
Kt——轉(zhuǎn)矩常數(shù);
iq——交軸電流。
令J'=1/J,T'=Ktiq-Tl,式(24)可簡化為

式(25)中包含待辨識參數(shù)J的信息,且與PMSM具有相同的外部激勵輸入iq以及相同的機械轉(zhuǎn)速ωm輸出。將ωm和J'分別以其估計值^ωm和J^'表示,可得模型參考自適應(yīng)系統(tǒng)(Model Reference Adaptive System,MRAS)可調(diào)模型的微分方程:
選擇PMSM本身作為參考模型,式(25)為表征參考模型動態(tài)特征的差分方程,當方程(26)中的估計值與實際值相等時,差分方程(26)就轉(zhuǎn)變?yōu)楸硎綪MSM本身的真實方程,兩個模型將等價。待辨識參數(shù)J^'為MRAS狀態(tài)變量,將參考模型的差分方程(25)減去可調(diào)模型(26),可得

式中,e為廣義誤差,定義如下:

對于數(shù)字控制系統(tǒng),伺服電機的電氣時間常數(shù)遠小于其機械時間常數(shù),故在一個速度環(huán)控制周期內(nèi),假定轉(zhuǎn)子機械轉(zhuǎn)速ωm和系統(tǒng)轉(zhuǎn)動慣量J不變。根據(jù)式(27),MRAS辨識系統(tǒng)可等價為一個標準反饋系統(tǒng),其中包含一個線性時不變前饋子系統(tǒng)和一個非線性時變反饋子系統(tǒng)。
MRAS的關(guān)鍵問題之一是自適應(yīng)機構(gòu)中所執(zhí)行的自適應(yīng)規(guī)律的確定。自適應(yīng)規(guī)律保證廣義誤差漸近穩(wěn)定且待辨識參數(shù)收斂到真實值[8]。根據(jù)Popov超穩(wěn)定理論,若保證自適應(yīng)系統(tǒng)穩(wěn)定,其中的非線性時變反饋環(huán)節(jié)需要滿足

其中,F(xiàn)=()();是當t1>0時不隨時間變化的有限正數(shù)。
為了避免廣義誤差趨近于零時算法失效,自適應(yīng)規(guī)律通常設(shè)計為比例積分(PI)結(jié)構(gòu)。因此,將預估計量J^'的自適應(yīng)規(guī)律取為PI形式,即

式中,(0)為初始值。將F和式(30)代入式(29),經(jīng)推導可得自適應(yīng)規(guī)律:

結(jié)合式(27),MRAS轉(zhuǎn)動慣量辨識系統(tǒng)的等效非線性結(jié)構(gòu)如圖2所示。依據(jù)自適應(yīng)規(guī)律,狀態(tài)變量驅(qū)動可調(diào)模型趨向于參考模型。因此,在廣義誤差趨近于零的過程中待辨識的轉(zhuǎn)動慣量將逐漸趨近于真實值。

圖2 MRAS參數(shù)辨識等效非線性反饋系統(tǒng)
MRAS辨識出的轉(zhuǎn)動慣量用于在線更新EKF狀態(tài)估計器的系統(tǒng)矩陣,從而實現(xiàn)轉(zhuǎn)動慣量的魯棒控制。EKF估計出的狀態(tài)變量中,角速度^ωm和角位移θ^m分別用于速度環(huán)和位置環(huán)的反饋值,等效負載轉(zhuǎn)矩T^l用于前饋控制以消除電機轉(zhuǎn)矩脈動。將轉(zhuǎn)動慣量自適應(yīng)EKF狀態(tài)估計用于PMSM伺服驅(qū)動系統(tǒng),構(gòu)成帶有速度估計和轉(zhuǎn)矩前饋的速度伺服系統(tǒng),如圖3所示。

圖3 EKF狀態(tài)估計速度伺服系統(tǒng)
3 仿真及試驗分析
仿真和試驗中所用PMSM及所帶負載的參數(shù)如表1所示。圖4顯示了不同轉(zhuǎn)動慣量初始值下的轉(zhuǎn)動慣量辨識結(jié)果,其間速度指令和轉(zhuǎn)矩指令分別在0.15 s和0.3 s時刻階躍變化。可以看出,慣量辨識值快速收斂于真實值,且在轉(zhuǎn)速和轉(zhuǎn)矩突變時沒有發(fā)生振蕩。
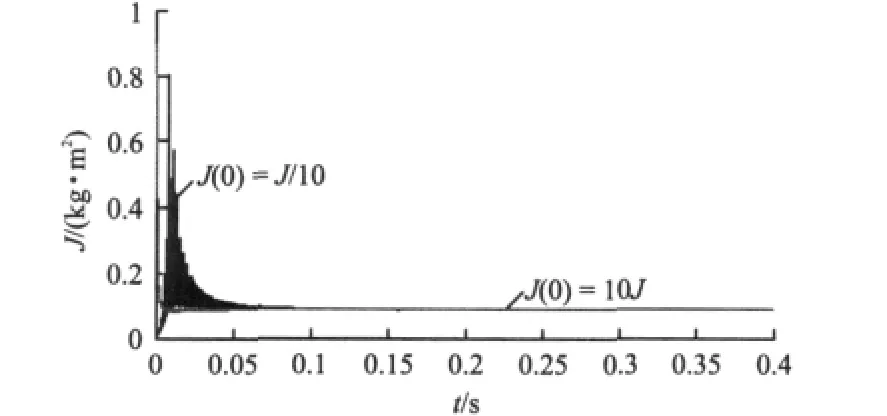
圖4 階躍指令下不同初始值的慣量辨識效果
圖5所示的仿真試驗中,設(shè)定速度指令為±100 r/min,負載轉(zhuǎn)矩恒定在8 N·m。在0.5 s時刻將EKF輸入矩陣中定子電阻修改為準確值的2倍,而同步電感為準確值的1/2,并在1 s和2 s時刻分別將轉(zhuǎn)動慣量設(shè)定為真實值的2倍和1/3。從仿真結(jié)果可以看出,當定子電阻和等效電感取值不準確時,估計器并未受到影響。相比之下,從仿真結(jié)果可以看出,當EKF系數(shù)矩陣中轉(zhuǎn)動慣量的取值偏離準確值時,電機轉(zhuǎn)速和轉(zhuǎn)矩的瞬態(tài)估計結(jié)果將出現(xiàn)較大的超調(diào)和波動。由此可見,EKF估計器對轉(zhuǎn)動慣量較為敏感,而對電阻和電感具有較好的魯棒性。在實際系統(tǒng)中,需要利用轉(zhuǎn)動慣量辨識結(jié)果對EKF的系數(shù)矩陣進行在線整定。

圖5 被控對象電氣參數(shù)對估計結(jié)果的影響
本文所用試驗系統(tǒng)如圖6所示。電機同軸安裝一個SICK公司生產(chǎn)的32 768線高精度光電編碼器,并連接至專用控制器捕捉倍頻后的編碼器脈沖,測量電機的實時轉(zhuǎn)速,作為比對參考。其中,速度環(huán)和電流環(huán)的控制周期分別設(shè)定為400 μs和 80 μs,得益于 STM32F4 處理器的強勁性能,轉(zhuǎn)動慣量辨識、EKF狀態(tài)估計以及PI電流控制器的總計算時間約為30 μs,加上約20 μs FOC算法執(zhí)行時間,所有的電機控制算法可在一個電流環(huán)周期內(nèi)執(zhí)行完畢。

表1 仿真和試驗中所用電機參數(shù)

圖6 試驗平臺配置
圖7所示試驗結(jié)果對比了超低速下使用轉(zhuǎn)動慣量自適應(yīng)狀態(tài)估計器ωest和M/T速度檢測ωenc方法時的電機速度響應(yīng)。試驗結(jié)果表明,在超低速度下,由于編碼器反饋信息的缺失,使用M/T方法時的速度響應(yīng)趨于不穩(wěn)定。相比之下,本文提出的方法仍舊能夠提供準確的速度反饋,獲得良好的低速控制性能。
圖8所示為動態(tài)轉(zhuǎn)速響應(yīng)的對比波形。試驗中,速度給定ωref為頻率70 Hz,幅值20 r/min的正弦指令。使用編碼器檢測轉(zhuǎn)速作為速度反饋時,速度響應(yīng)ωenc存在約30°的相位滯后,而使用自適應(yīng)EKF速度估計作為速度反饋值時,速度響應(yīng)ωest沒有明顯的相位滯后,動態(tài)跟隨特性良好。

4 結(jié)語
本文提出了一種使用常規(guī)編碼器條件下獲得PMSM良好速度特性的控制方法。仿真和試驗結(jié)果表明,當PMSM運行于低速或超低速區(qū)域時,本文提出的EKF狀態(tài)估計策略依舊可以提供準確、實時的速度反饋,從而在寬調(diào)速范圍內(nèi)實現(xiàn)良好速度控制性能,有效改善了系統(tǒng)的動態(tài)性能并增大了調(diào)速范圍。此外,通過MRAS在線辨識出的轉(zhuǎn)動慣量對EKF系數(shù)矩陣實施自整定后,自適應(yīng)EKF估計算法對系統(tǒng)轉(zhuǎn)動慣量、定子電阻、等效電感的變化以及環(huán)境噪聲均有很好的魯棒性,與使用M/T速度檢測方法相比具有調(diào)速范圍寬、實時性好及抗干擾能力強等優(yōu)勢。
[1]WANG M S,KUNG Y S,THI H,et al.Superior low-speed control of a permanent magnet synchronous motor with digital encoder[C]∥Proceedings of the Institution of Mechanical Engineers,PartⅠ:Journal of Systems and Control Engineering,2011,225(2):281.
[2]KARANAYIL B,RAHMAN M F,GRANTHAM C.On-line stator and rotor resistance estimation scheme for vector-controlled induction motordriveusing artificial neural networks[C]∥Industry Applications Conference,2003,38th IAS Annual Meeting,2003:132-139.
[3]HEUI W K,SEUNG K S.A new motor speed estimator using Kalman filter in low-speed range[J].Industrial Electronics,IEEE Transactions on,1996,43(4):498-504.
[4]楊曉帆,陳廷槐.人工神經(jīng)網(wǎng)絡(luò)固有的優(yōu)點和缺點[J].計算機科學,1994(2):23-26.
[5]楊松濤,和麗清,安成斌.DSP在高精度數(shù)字式電機測速中的應(yīng)用[J].紅外與激光工程,2006(S4):543-548.
[6]王成元,孫宜標,夏加寬,等.電機現(xiàn)代控制技術(shù)[M].北京:機械工業(yè)出版社,2006.
[7]TAEG J K,DONG S H.High-performance speed control of electric machine using low-precision shaft encoder[J].Power Electronics,IEEE Transactions on,1999,14(5):838-849.
[8]ATTAIANESE C,DAMIANO A,GATTO G,et al.Induction motor drive parameters identification[J].Power Electronics,IEEE Transactions on,1998,13(6):1112-1122.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
