基于FPGA和交流步進控制的永磁同步電機伺服系統
2012-08-28 06:50:04李金松
電機與控制應用 2012年7期
張 坤, 李金松, 張 琳, 董 硯, 鄭 易
(1.河北工業大學控制科學與工程學院,天津 300130;
2.河北工業大學信息工程學院,天津 300401)
基于FPGA和交流步進控制的永磁同步電機伺服系統
張 坤1, 李金松1, 張 琳2, 董 硯1, 鄭 易1
(1.河北工業大學控制科學與工程學院,天津 300130;
2.河北工業大學信息工程學院,天津 300401)
以永磁同步電機(PMSM)為控制對象,以現場可編程門陣列(FPGA)為控制核心器件,對交流步進控制方式應用于伺服系統的場合,進行了理論與仿真研究,最后經實際試驗驗證。仿真與試驗結果表明,應用交流步進控制方式的PMSM伺服系統具有良好的速度與位置可控性,能夠滿足現代工業對伺服系統的高要求。同時,研究結果也為PMSM在高性能控制場合下的應用提供了參考。
現場可編程門陣列;交流步進控制;永磁同步電機;伺服系統
0 引言
永磁同步電機(Permanent Motor Synchronous Motor,PMSM)具有高功率密度、高效率、高功率因數、高轉矩慣量比等優點,特別是具有高剩磁密度、高矯頑力、高磁能積和現行退磁等優異性能的釹鐵硼稀土永磁材料的出現和相應的工藝技術的發展,使得PMSM性能不斷提高。
隨著現代工業的發展,一些領域需要電機與外界進行通信,還有一些領域需要多臺電機協同控制,這就要求核心控制器件具有快速且實時的處理能力。基于現場可編程門陣列(Field Programmable Gate Array,FPGA)的電機控制得到越來越多的關注。FPGA實現軟件與硬件、高速與靈活性的完美結合,此外,其設計周期短,可移植性好,控制器接口靈活,計算速度更快,易于實現電機控制專用數字芯片。
交流步進控制是把位置控制、速度控制和伺服控制等不同的傳動控制方式有機地結合起來,使同步電機的氣隙磁動勢由連續的旋轉磁場變為離散的步進磁場。對離散的步進磁動勢進行控制,可以獲得良好的速度控制,還可進一步取得精確的位置控制,從而形成高性能的交流傳動控制系統。它打破了連續與離散、速度與位置、旋轉與步進的嚴格界限,形成了一種統一的交流步進控制理論[1]。
1 交流步進控制與定位控制
1.1 交流步進控制理論
同步電機的步進控制中心思想是將電機的定子電流離散為bH步。每一步對應一個大小固定和位置步進的定子磁動勢,與轉子磁動勢構成步進角,從而產生步進的復位轉矩,進而將轉子鎖定在一個特定的位置上[2]。
如果將同步電機的定子磁勢由旋轉磁勢離散為步進磁勢。則定子氣隙中所停靠的位置也就是這種電機步進運動時能夠提供的定位點數,即電機的每步數。
當PMSM定子繞組通以三相對稱正弦電流ia、ib、ic時:
式中:Im——通入的三相電流峰值。
將PMSM三相磁動勢進行合成可知,三相繞組產生的氣隙磁動勢是一個旋轉磁動勢,其幅值是相脈振磁動勢幅值的1.5倍:

式中:Fa——相脈振磁動勢的幅值。
若按電角度計算,旋轉磁動勢在空間運行的電角度θ和繞組中電流在時間上經歷的電角度永遠相等,即旋轉磁動勢每秒的轉速為


式中:f——定子電流的頻率;
pm——電機的磁極對數。
假設對于三相定子繞組,如果不通入連續正弦電流,而是輸入下列對稱離散電流:

為了形象說明磁動勢的步進作用,取環形分配器的循環拍數bH=12,并繪出步進磁動勢在復數平面中的12個位置,以A相繞組的軸線為實軸,如圖1所示。當k=0時,∑F和Re軸同相,因為ia=Im,ib=ic=-0.5Im,∑F(0)=1.5Fa。在圖1中,記作∑F(0)。同樣可以得出另外11個磁動勢矢量,如k=6時,ia=-Im,ib=ic=0.5Im,∑F(6)=1.5Fa·eiπ,其他可依次求出。
式中:im——通入相電流的峰值;
bH——環形分配器的循環拍數;
k——主令脈沖的拍數。
將輸入電流的一個周期分為bH份(bH為正整數),對于三相繞組,為保證三相電流互差2π/3和各相正負半周對稱,最好取bH是6的整數倍。k為主令脈沖拍數,它等于任意正整數。由此得到的氣隙磁動勢將是一個步進磁動勢:
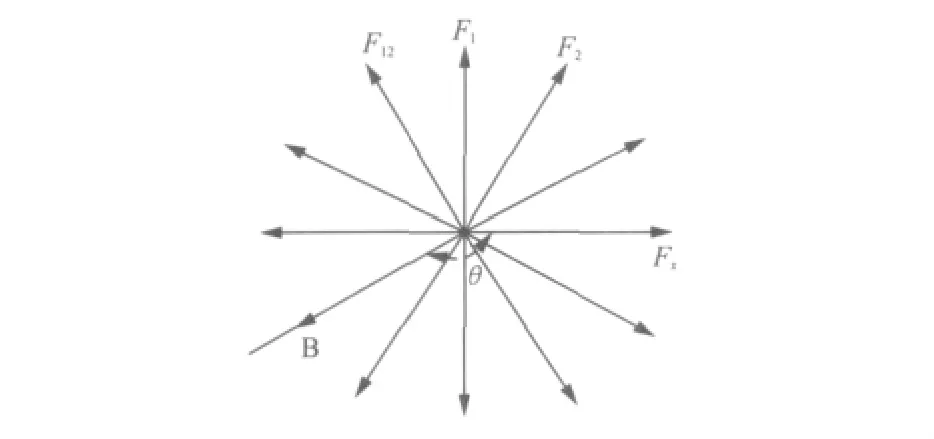
圖1 三相繞組的步進磁動勢
1.2 定位控制方法
本伺服控制系統為了實現高精度的定位控制,將速度變化分為三段,即起動、穩速、降速及制動,如圖2所示。
第一階段(0~t1)是升速過程,在本階段,給定子超前轉子3步的電流矢量,并通以大的電流矢量,這樣電機將以最大的加速度加速,使電機在最短的時間內達到恒定的轉速。當電機轉速到達恒定的轉速之后將進入第二階段。
第二階段(t1~t2)為恒轉速運行階段,本階段需要把電機的速度控制在一個恒定值,當轉速低于設定轉速時,給定子加超前的電流矢量,當速度高于設定轉速時給定子滯后的電流矢量,這樣就能盡量使電機速度控制在恒定的轉速。
第三階段(t2~t3)為減速階段,在本階段中,電機定子的給定電流滯后3步轉子的電流矢量,這樣電機就可以以最大減加速度進行降速,當電機運行到設定的脈沖數后,電機將進入低速運行階段。
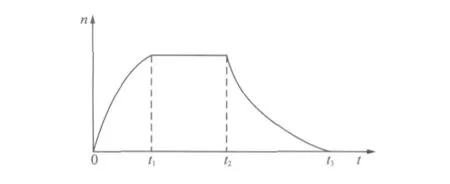
圖2 三段速度定位示意圖
2 仿真模型與試驗平臺搭建
2.1 仿真模型搭建
本伺服系統的MATLAB/Simulink仿真模型主要包括以下幾部分:電流滯環PWM逆變器模塊、PMSM模塊、電機測量模塊、MATLAB功能函數模塊等幾部分組成。其工作原理為通過電機測量模塊獲得電機轉子的位置和速度參數,并將其反饋到MATLAB功能函數模塊,經過MATLAB函數模塊和逆變模塊將連續正弦電流離散化,形成步進電流。反饋部分通過測量電機的實際電流值與給定電流相比較,用電流滯環模塊實現電機的自動控制,從而獲得良好的動態特性和定位特性。
2.2 試驗平臺搭建
系統電路主要包括:控制電路部分和功率放大部分,其中控制電路部分包括FPGA及其外圍電路,電流信號的電壓提升電路,位置檢測電路,顯示按鍵驅動電路;功率放大部分的核心模塊為三菱公司的智能功率模塊PM15RSH120,主要包括:多組獨立電源,觸發信號驅動電路,電壓、電流采樣電路,保護電路。
2.2.1 控制部分電路設計
全數字驅動控制器的核心芯片采用Xilinx公司生產的Spartan-3E芯片XC3S500E。其主要功能是快速實時地進行信號處理,包括接受鍵盤輸入信號、電流采樣信號、位置反饋信號及電路保護信號,綜合以上信號的結果在適當時候輸出適當的IPM驅動信號,從而實現對PMSM的精確控制。控制部分結構圖如圖3所示。
2.2.2 功率部分主電路設計
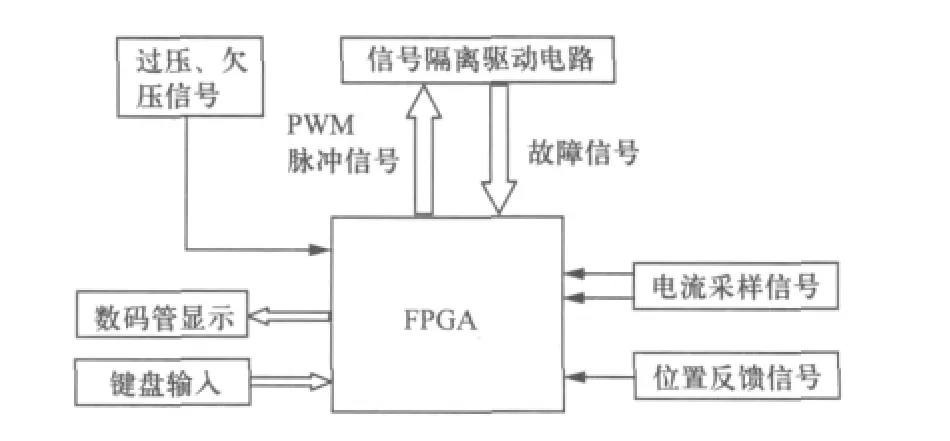
圖3 控制部分結構圖
驅動控制器的主電路由整流電路、直流中間電路和逆變電路三部分以及有關的輔助電路組成。主電路原理圖如圖4所示。
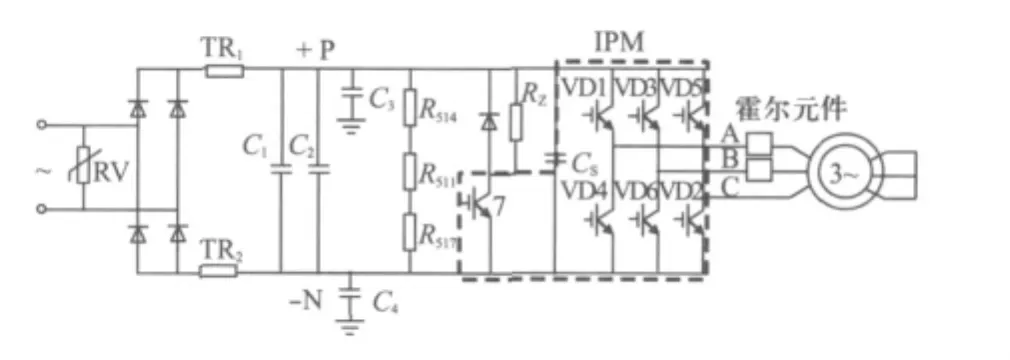
圖4 功率放大主電路
本系統選用的“智能功率模塊”(IPM),即三菱電子的集成IPM PM15RSH120智能功率模塊,不同于一般功率器件,是一種新型的電力電子模塊,將功率變換、柵極驅動和保護電路集成一體作為逆變器。其功率模塊的主要特點如下:采用低飽和壓降、高開關速度、內設低損耗電流傳感器的IGBT功率器件;采用單電源、邏輯電平輸入、優化的柵極驅動;提供系統故障輸出,向系統控制器提供報警信號。
3 仿真與試驗
3.1 仿真結果
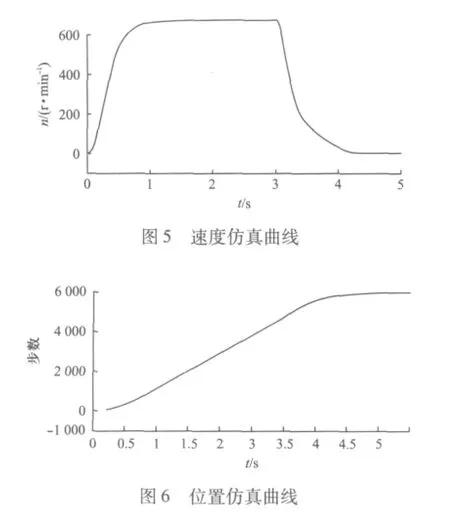
電機在高速運行時,由于轉動部分具有相當大的動能,起動和制動階段都需要有一定的加速和減速時間,以便用有限的最大電磁轉矩去起動和制動。步進傳動的突跳過程就需要一定的升速時間,在這段時間內轉矩角逐漸增大,轉子轉速逐漸升高,只要在轉子轉速升高到等于步進磁動勢的平均轉速時,電機的動態角誤差還沒有達到允許的最大值,電機就不會失步。
速度及位置仿真曲線分別如圖5、圖6所示。
3.2 試驗結果
本文以美國KOLLMONGEN公司生產的1.6 kW的M205B型永磁同步伺服電機為研究和控制對象。
在上面提到的三段速度運行曲線中,為獲得較大的起動、制動轉矩,給電機通以不同大小的電流矢量。在第一和第三階段,即升速和降速定位階段通以兩倍額定電流,這樣電機就會在這段時間內具有很大的加速度,使電機在盡量短的時間內達到規定要求,在第二階段給電機通以額定電流的電流矢量。
A相定子電流跟隨曲線如圖7所示。
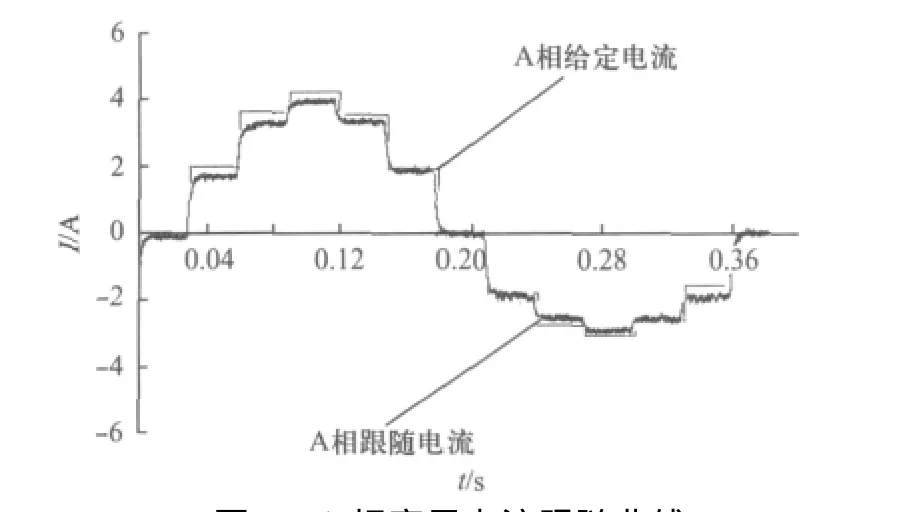
圖7 A相定子電流跟隨曲線
三段速度試驗曲線如圖8所示,當t=2.5 s時,開始第一階段即升速階段;第二段是恒速階段;第三段為降速定位階段。
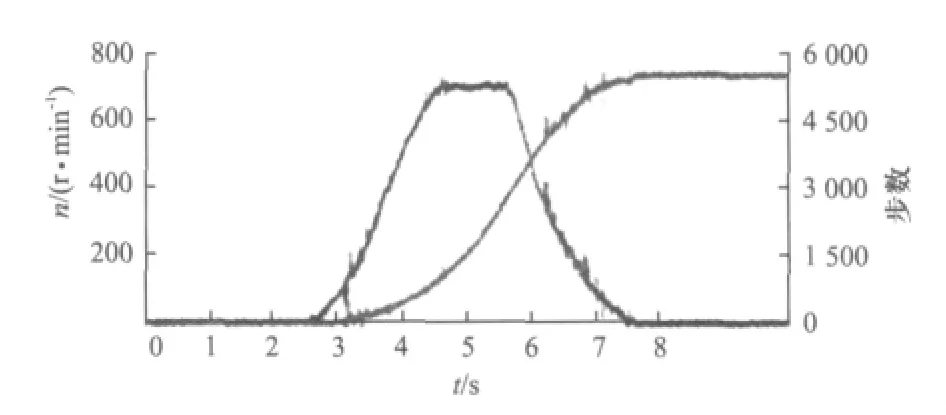
圖8 三段速度位置試驗曲線
4 結語
通過對基于FPGA和矩角控制下的PMSM伺服控制系統的仿真與試驗可知,運用FPGA技術與矩角控制理論的PMSM伺服系統,相對于傳統控制方法下的系統,具有良好的動態特性與定位特性,可以滿足現實中對于速度及定位精度雙高要求的場合,同時為PMSM在高性能控制場合下的應用提供了參考。
[1]孫鶴旭.交流步進傳動系統[M].北京:機械工業出版社,1996.
[2]鄭澤東,李永東.永磁同步電機伺服控制系統的研究現狀及發展[J].伺服控制,2008(12):20-22.
[3]薛小剛,葛毅敏.Xilinx ISE 9.X FPGA/CPLD設計指南[M].北京:人民郵電出版社,2008.
[4]林飛,杜欣.電力電子應用技術的MATLAB仿真[M].北京:中國電力出版社,2009.
[5]陳伯時,謝鴻鳴.交流傳動系統的控制策略[J].電工技術學報,2002,15(5):11-15.
Design of Servo-System with Permanent Magnet Synchronous Motor Based on FPGA and AC Stepper Control
ZHANG Kun1,LI Jinsong1,ZHANG Lin2,DONG Yan1,ZHENG Yi1
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;
2.School of Information Engineering,Hebei University of Technology,Tianjin 300401,China)
The simulation and theoretical study on the servo-system based on permanent magnet synchronous motor and FPGA in the mode of AC stepper control were conducted.The simulation and the experiment results showed that PMSM with application of AC stepper control has a good ability of speed and position control,it can satisfy the high requires in modern industry.Mean while,the study results also provided the reference for the application of PMSM in high-performance occasions.
field programmable gata array(FPGA);AC stepper control;permanent magnet synchronous motor(PMSM);servo-system
TM 351
A
1673-6540(2012)07-0041-04
2012-03-08