無人作戰飛機空戰自主戰術決策方法研究
2012-08-27 13:13:24張立鵬魏瑞軒
電光與控制 2012年2期
關鍵詞:動作
張立鵬, 魏瑞軒, 李 霞
(空軍工程大學工程學院,西安 710038)
0 引言
具有空中打擊能力的無人作戰飛機(UCAV),作為一種可執行殲擊機戰場任務的新概念武器,已經引起了各軍事強國的廣泛關注。UCAV的出現,標志著無人機將從過去一直執行空中偵察、戰場監視和戰斗毀傷評估等任務的作戰支援裝備,上升為能執行壓制敵防空系統、對地攻擊、攔截戰術導彈和巡航導彈,甚至可執行空對空作戰任務的真正的作戰裝備。要實現壓制、攻擊、攔截甚至空對空作戰,就必須要求UCAV具有自主戰術決策的能力。自主戰術決策是指無人機自主地評估戰場態勢,根據一定的空戰規則和推理機制生成機動控制指令,控制UCAV的戰術動作,從而達到自主戰術決策進行作戰的目的。未來戰場將更加智能化和信息化,而對于無人機來說,提高其智能化水平,使其能夠自主地進行戰術決策顯得尤為重要[1],因此,研究UCAV自主決策控制技術意義深遠。
目前對于空戰決策的研究,一般分為傳統方法和智能方法兩類。對于傳統的方法,多采用微分對策的方法進行雙機追逃問題的研究[2],或是進行基于飛行員經驗的專家系統的設計[3]等;對于智能方法,有影響圖方法[4]、試探性機動方法[5]等。
本文著重研究UCAV在空戰中如何利用已知的目標機和UCAV的相對態勢,進行有效的在線解算,不斷實時地進行評估,確定應當采用何種戰術動作,即如何進行自主戰術決策的問題。首先建立了基于航跡坐標系下的UCAV運動方程,提出了考慮動態延遲的機動控制指令,并對美國NASA提出的7種基本操作動作進行了定量描述;其次,按照模糊空戰規則,在每個周期都進行機動決策選擇動作,并不斷進行威脅評估;最后,設計了自主戰術決策系統。
1 UCAV機動控制指令及基本操縱動作庫
1.1 機動控制指令
本文主要研究的是側重于UCAV航跡特性的自主戰術決策,這樣,可以忽略短時間的力矩不平衡引起的飛機姿態變化過渡過程,假定飛機總是處于力矩平衡狀態,因此飛機的運動主要取決于飛機的受力情況。本文根據UCAV的力方程和質心運動方程,忽略側滑角的影響,在飛機航跡坐標系下建立的飛機的3DOF質點模型。
1)力的方程。
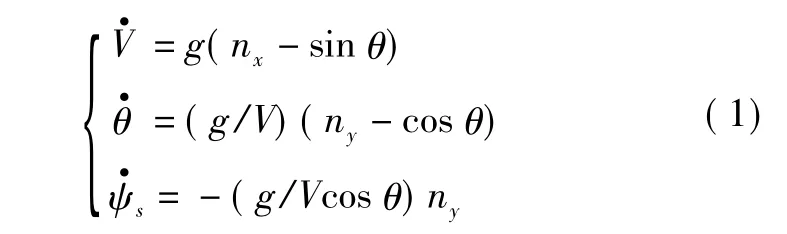
式中:nx,ny,γs分別為飛機的切向過載、法向過載和繞速度軸的滾轉角;V,θ,ψs分別為UCAV速度大小、航跡傾斜角、航向角;g為重力加速度。值得說明的一點是,在考慮飛機3DOF模型時,滾轉角γs是沒有實際意義的,此時的γs是指繞速度軸的滾轉角。
由于nx和ny都是在氣流坐標系下定義的,而在以上建立力的方程時,采用的是航跡坐標系,所以,必須把nx和ny從氣流坐標系轉化到航跡坐標系,其變換矩陣為
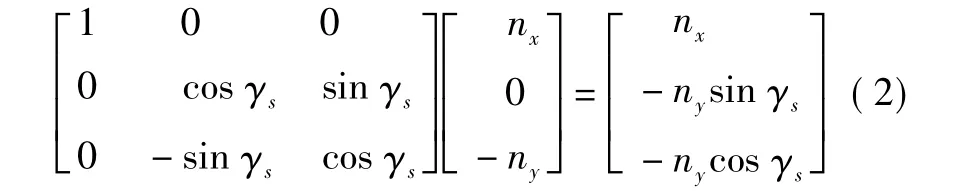
將式(2)代入式(1),得到飛機在航跡坐標系下的飛機力方程為
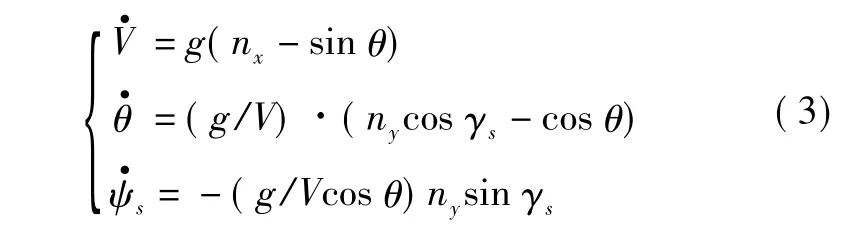
2)質心運動方程。
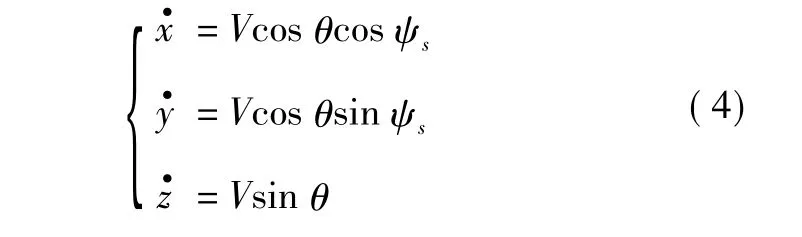
對于航跡特性的描述,可以采用飛機上某點的速度矢量V特性(包括速度的大小和方向),因此對飛機航跡特性的控制,也就是對飛機速度矢量V=(V,θ,ψs)的控制。其中:V為速度的大小;θ為航跡傾斜角;ψs為對應速度矢量的航向角。
從式(1)和式(4)可以看出,只要已知 nx,ny,γs三個量,通過數值積分能求出UCAV的位置和速度,根據解算出的UCAV的位置速度信息,以及其探測到的敵機的位置速度信息,可以確定UCAV與敵機的相對位置和速度信息,從而評估敵機對UCAV的威脅指數。因此,本文采用nx,ny,γs作為UCAV的機動控制指令。因為UCAV機動控制存在動態延遲,在機動控制指令生成環節中加入延遲環節,如下
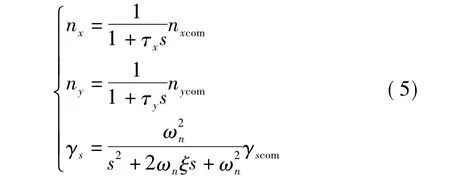
式中:τx,τy分別為 nx和 ny的延遲時間常數;nxcom,nycom,γscom為期望機動控制指令;ωn為自然震蕩頻率;ξ為阻尼系數。
1.2 基本操縱動作庫
本文采用美國NASA提出的基本操縱動作庫作為自主戰術決策的候選范圍[6],如圖1所示。
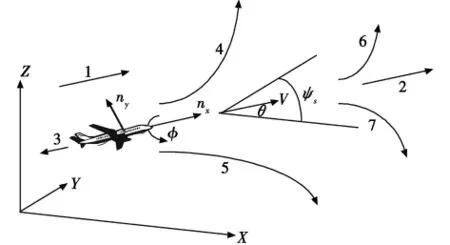
圖1 基本操縱動作庫示意圖Fig.1 Schematic diagram of basic manipulation database
基本操作動作庫以常用空戰操縱方式為依據設計,包括7種機動動作:1)定常保持飛行;2)最大加力加速;3)最大加力減速;4)最大過載左轉;5)最大過載右轉;6)最大過載上升;7)最大過載俯沖。
對于基本操縱動作庫的實現,采用航跡坐標系下的機動動作指令nx,ny,γs來實現,如表1所示。列出了7種基本動作與其相對應的機動控制指令,作為自主戰術決策的候選動作庫。
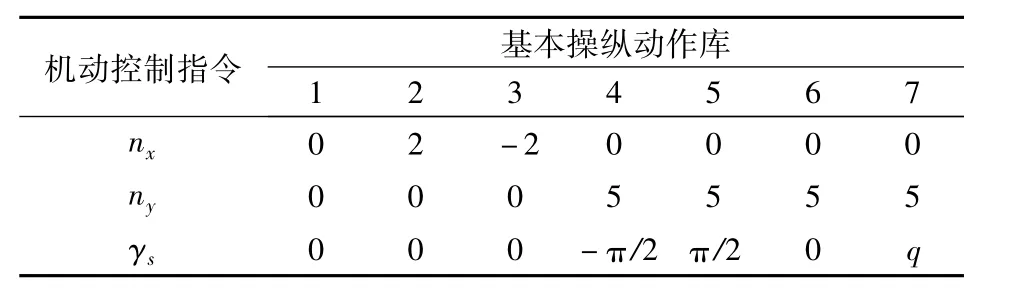
表1 基本操縱動作相應機動控制指令Table 1 Maneuver control command of basic manipulation database
2 UCAV空戰自主戰術決策方法
2.1 UCAV空戰自主戰術決策系統方案
研究UCAV自主戰術決策的目的:賦予UCAV更高的智能性,使其具有更強的自主性,可以獨立地應對突發事件,自主進行戰術決策,完成從偵察監視到空戰打擊的戰場任務,從而最大程度地解放操作員,讓操作員能夠從事更加上層的工作,或者同時操縱多架UCAV,提高戰場效率[7]。
駕駛員操縱飛機時,可以把駕駛員理解為一個智能模塊,該模塊是在對敵機和我機位置和速度預測的基礎上,做出合理的分析判斷,在現有的經驗戰術動作知識庫中,采取某一戰術機動,達到保持優勢、消滅敵機的目的[8-10]。對于UCAV我們完全可以仿照有人機的控制過程結構,圖2中用“自主戰術決策模塊”代替駕駛員,進行有效的戰術決策,進而生成機動控制指令,控制UCAV完成機動動作。基于以上分析,提出UCAV空戰自主戰術決策結構,如圖2所示。
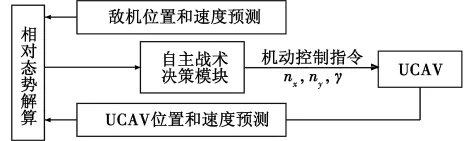
圖2 UCAV空戰自主戰術決策結構示意圖Fig.2 Structure of UCAV's autonomous tactical decision-making in air combat
圖2 中,“相對態勢解算”提供“自主戰術決策模塊”所需的態勢信息,“自主戰術決策模塊”輸出機動控制指令,控制UCAV完成機動,整個控制模塊是一個閉環系統,不斷進行解算更新,達到最優的目的。
2.2 主戰術決策模塊
自主戰術決策模塊的內部結構如圖3所示。“機動觸發器”根據“決策推理規則”產生結果,從基本操縱動作庫中選擇機動動作。其中,“決策推理規則”按照模糊控制[11]的規則遍歷7種基本操縱動作。該模塊是在雙機相對態勢解算完成的情況下,不斷進行完全嘗試選擇最優的結果。
自主戰術決策模塊的核心是“決策推理規則”環節,本文采用模糊控制的思想,提出在空戰中起主導作用的4個模糊因子,作為決策推理的構成因子,把空戰中基于專家知識或駕駛員長期積累的經驗,轉化為具有實際意義的模糊控制規則。從量化比較的角度,不斷在線更新數據,實時引導UCAV機動決策,使得機動的結果對UCAV更加有利,占取優勢區域,爭得有利攻擊時機。
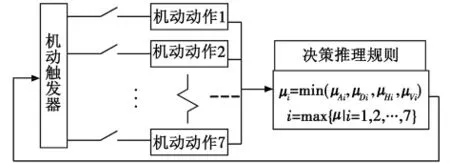
圖3 UCAV自主戰術決策模塊Fig.3 Module of autonomous tactical decision-making
“決策推理規則”由角度模糊因子μA、距離模糊因子μD、高度模糊因子μH以及速度模糊因子μV組成,對于每種模糊因子,根據其不同的物理意義,選擇不同的計算方法,但是,計算的目的都是把該模糊因子化為0~1的閉區間內的數值,數值越是接近1,則該模糊因子對于UCAV更具有優勢。本文以下標p表示UCAV,以下標e表示敵機,下面分別給出表達式,并對相應的符號作以說明。
1)角度模糊因子L。
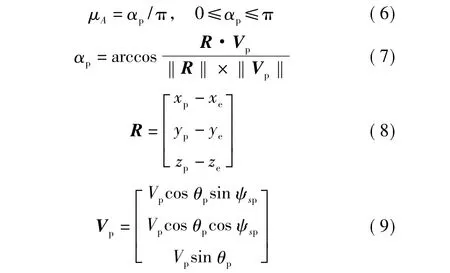
角度模糊因子μA由式(6)~式(9)可計算,圖4a給出了μA和αp之間的關系圖,αp是矢量R和Vp之間的夾角,如圖4b所示。
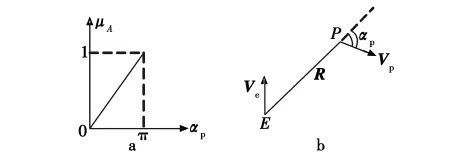
圖4 角度模糊因子示意圖Fig.4 Schematic diagram of fuzzy aspect factor
其中:xp,yp,zp為 UCAV 的位置坐標;xe,ye,ze為敵機的位置坐標;R為雙機距離矢量;Vp為UCAV的速度矢量;Vp為UCAV的速度矢量大小。可看出,當αp=π時,UCAV速度矢量直接指向敵機,優勢最大;當αp=0時,UCAV速度矢量背離敵機,優勢最小。同時值得說明的一點是,角度模糊因子在4個模糊因子中的影響最大,所以在后面的規則中,對角度模糊因子做了閥值處理。
2)距離模糊因子。
距離模糊因子μD由式(10)~式(11)可計算,圖5給出了μD和R之間的關系,其中:Rm為UCAV的最佳射擊距離;δ為標準方差;R是矢量R的大小,采用正態分布來計算距離模糊因子μD,是因為這樣能更好地反映雙機距離與最佳射擊距離之間的關系:一方面,從數學的角度說明,并非是距離越小越好;另一方面,也說明距離的變化對UCAV的優勢影響并非是線性的。

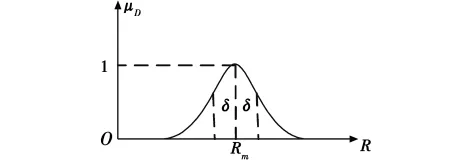
圖5 距離模糊因子示意圖Fig.5 Schematic diagram of fuzzy distance factor
3)高度模糊因子。
高度模糊因子μH由式(12)可計算,圖6給出了μH和z之間的關系,其中:Ho為UCAV的最小極限高度,如果UCAV的高度小于最小極限高度,則UCAV處于危險區域,如果UCAV的高度大于最小極限高度,則UCAV處于優勢位置,采用分段函數來描述。
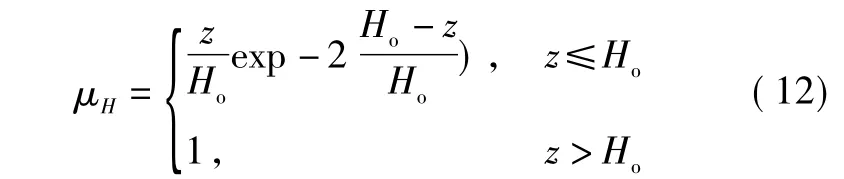
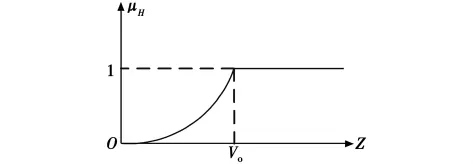
圖6 高度模糊因子示意圖Fig.6 Schematic diagram of fuzzy height factor
4)速度模糊因子。
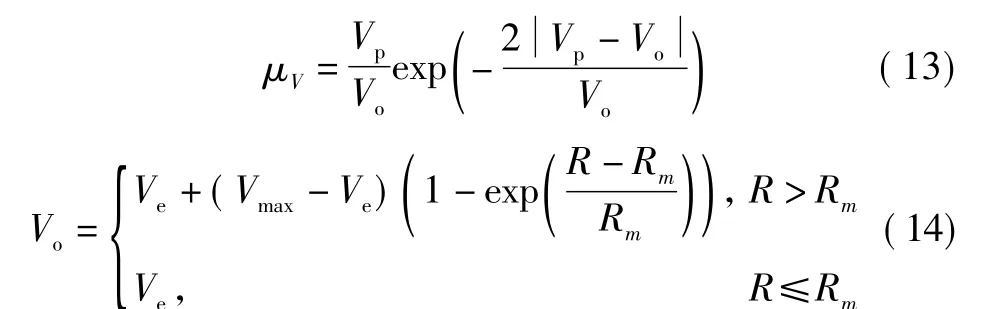
速度模糊因子μV由式(13)~式(14)可計算,圖7給出了μV和Vp之間的關系,其中:Ve為敵機速度矢量大小;Vmax為UCAV的最大速度;Vo為UCAV的最佳攻擊速度。如前所述,Rm為UCAV的最佳射擊距離。對于速度模糊因子的描述,既借鑒了距離模糊因子μD的正態分布描述,又借鑒了高度模糊因子μH的分段函數法。
至此,UCAV空戰中的4個模糊因子描述完成,這樣就可以用4個模糊因子的函數來不斷地分析采用各種動作所產生的效果的優劣,也就是試探性地執行基本操縱動作庫的各種動作,把4個模糊因子的函數作為目標函數,進行比較,從而獲取最優的戰術動作。
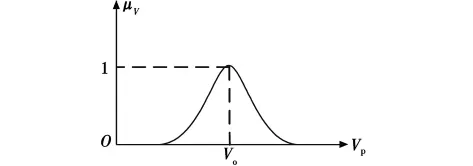
圖7 速度模糊因子示意圖Fig.7 Schematic diagram of fuzzy velocity factor
本文這樣獲得最優基本動作:首先,預測出雙機的位置和速度信息,作為“決策推理規則”的輸入信息;其次,分別計算在當前狀態下執行7種基本動作后,以上 4 個模糊因子 μAi,μDi,μHi,μVi的大小;然后,確定每種基本動作下的4個模糊因子的最小值,并記為μi;最后,找出μi中的最大值,選擇相應的機動動作執行。
以上描述,采用下面的數學函數實現。
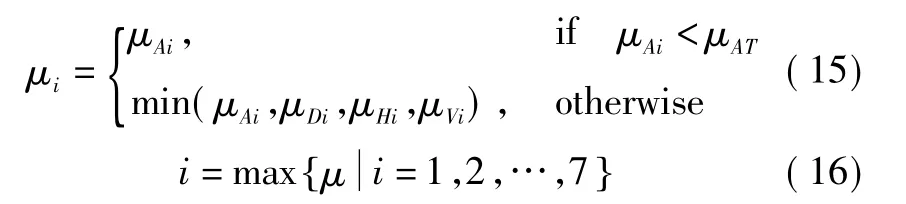
其中:μAT是角度模糊因子閥值,因為角度模糊因子在空戰中起更重要的作用,所以是μAi<μAT,不再取4個模糊因子中的最小值,而是把角度模糊因子直接作為比較的因素。
3 仿真實驗
為了驗證本文提出的UCAV空戰自主決策系統,選擇參數進行仿真實驗,選擇時間常數τx=0.2 s,τy=1.2 s,自然振蕩頻率 ωn=6.34 rad/s,阻尼系數 ξ=0.707,UCAV最佳攻擊距離Rm=600 m,標準方差σ=600,UCAV最大速度 Vmax=304 m/s,UCAV最小高度極限Ho=1550 m,角度因子閥值μAT=0.5,控制指令仿真時間常數T=0.5 s。
取 UCAV 的位置矢量P=(x,y,z)為(3032,0,1535),速度矢量V=(V,θ,ψs)為(205,0,0);敵機的位置矢量為(3032,3047,1535),速度矢量為(205,0.52,2.62),其中,速度矢量V中的θ和ψs是用rad表示的,敵機的速度矢量的角度用“°”來表示,分別是30°和150°,在仿真中假設敵機作轉彎半徑為250 m的戰斗轉彎(在轉彎的過程中不斷地爬升)。
仿真實驗結果如圖8~圖10所示。圖8是雙方空戰運動軌跡,圖9是在空戰過程中模糊因子的變化曲線,圖10是機動控制指令的變化曲線。
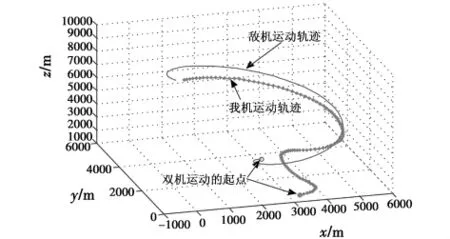
圖8 UCAV空戰雙機的運動軌跡Fig.8 The trajectories of UCAV in air combat
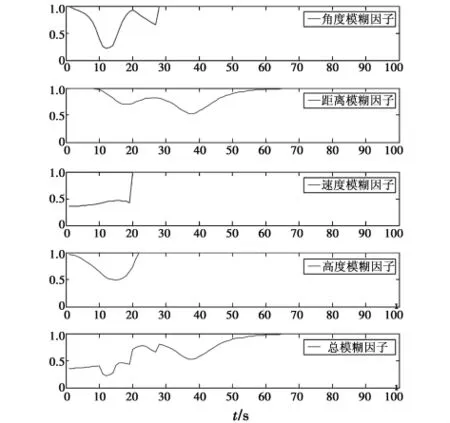
圖9 模糊因子變化仿真結果Fig.9 Simulation results of fuzzy factors
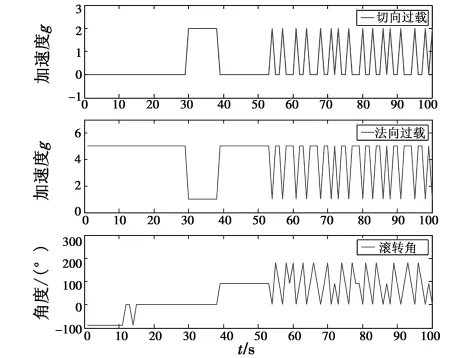
圖10 機動控制指令變化仿真結果Fig.10 Simulation results of maneuver control command
從仿真結果可以看出,UCAV自主戰術決策系統性能良好,在最優機動控制指令的作用下能夠很好地完成UCAV自主戰術決策,使UCAV取得空戰優勢,進行攻擊。
4 結論
本文在考慮延遲的機動指令的基礎上,設計了UCAV空戰自主戰術決策系統。從仿真結果可以看出,UCAV能夠依據當前的敵我態勢,及時作出正確的機動方案決策,使我方擁有很大的作戰效益優勢。系統的設計在未來UCAV空戰特別是近距空戰中具有重要的意義。另外,本文從基于美國NASA提出的基本操作動作庫對UCAV的自主戰術決策系統進行了設計,在實際應用系統的設計中,還需要考慮怎樣選擇合理的機動動作庫。
[1] 陳小兵,常勇,孔繁峨.近距格斗自主決策研究[J].電光與控制,2009,16(4):34-37.
[2] NUSYIRWAN I F,BIL C.Factorial analysis of a real time optimisation for pursuit-evasion problem[C]//46th AIAA Aerospace Sciences Meeting and Exhibit,2008:195-198.
[3] 鐘友武,柳嘉潤,楊凌宇,等.自主近距空戰中機動動作庫及其綜合控制系統[J].航空學報,2008,29(5):114-121.
[4] 鐘麟,佟明安,鐘衛,等.多級影響圖在空戰機動決策中的應用[J].系統工程理論與實踐,2006,26(10):137-140.
[5] 柳嘉潤,鐘友武,張磊,等.自主空戰決策的試探機動方法及仿真研究[J].系統仿真學報,2008,20(5):1238-1243.
[6] YANG C D,KUNG C C.Implement the one-on-one air combat simulation using prediction of optimal maneuver[J].Trans aeronautical and astronautical society of the Republic of China,1998,30(2):149-159.
[7] 董卓寧,張汝麟,陳宗基.無人機在惡劣氣象條件下的自主決策技術[J].航空學報,2007,29(5):107-113.
[8] STEVENS B L.Aircraft control and simulation[M].2nd ed.USA:John wiley & sons,2003.
[9] 柳嘉潤.綜合控制系統與自主近距格斗技術研究[D].北京:北京航空航天大學,2006.
[10] 楊暉.無人作戰飛機自主控制技術研究[J].無人機,2007(1):27-29.
[11] 劉金琨.智能控制[M].北京:國防工業出版社,2005:36-43.
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2022年12期)2022-03-19 22:41:51
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
七彩語文·低年級(2014年10期)2015-01-14 14:46:27