基于平方和的一類不確定非線性系統(tǒng)的魯棒穩(wěn)定性
2012-08-17 11:36:12陳少燕廈門大學福建廈門361005
自動化博覽 2012年5期
陳少燕(廈門大學,福建 廈門 361005)
1 引言
不確定系統(tǒng)的魯棒分析與綜合問題一直以來都是控制界的研究熱點,目前大多采用Lyapunov穩(wěn)定理論來研究,其中二次穩(wěn)定是一個非常重要的概念和方法[1]。但是,二次穩(wěn)定性要求對所有的不確定參數(shù),存在一個公共的Lyapunov函數(shù),這種要求過于苛刻,因此二次穩(wěn)定是一個較為保守的概念[2]。如果能夠根據(jù)變化的參數(shù)選取不同Lyapunov函數(shù),就可以大大降低系統(tǒng)設計的保守性。因此,不少學者通過將Lyapunov變量參數(shù)化來獲得一類依參數(shù)Lyapunov函數(shù)的穩(wěn)定條件[3-5]。相對于單一Lyapunov函數(shù)的穩(wěn)定條件,其系統(tǒng)保守性得到明顯改善。但是以上方法運用于線性模型或者模型近似線性化上,這樣處理上丟失了原模型中的非線性部分,得到的結果精度較低。
近年來,由于SOS理論的提出,許多學者采用SOS理論分別對非線性系統(tǒng)的魯棒性和穩(wěn)定性分析、幾何定理證明、量子信息論、吸引域估計等問題進行了研究。SOS理論在處理非線性控制問題過程中的優(yōu)勢在于:(1)非凸非線性控制問題可以轉化為凸優(yōu)化問題;(2)不需要對原始模型進行過多的化簡近似;(3)得到的控制器是關于狀態(tài)變量的多項式方程,便于工程執(zhí)行。
本文針對一類不確定非線性系統(tǒng),利用SOS理論結合Lyapunov函數(shù)[6]的方法,給出了使系統(tǒng)穩(wěn)定的非線性控制器設計方法,最后利用SOSTOOLS[7-9]工具箱求解出控制律。本文將用SOS理論方法彌補以往設計方法中不能給出系統(tǒng)有效控制器設計和求解方法的不足。此外,采用的SOS理論方法彌補了文獻[6]中LMI不能計算全局解的不足。
2 基于SOS理論的非線性狀態(tài)反饋控制器設計
定義1[6]:對于多項式f(x),如果存在一組多項式fi(x) 滿足:

則稱多項式f(x)允許平方和分解,或稱多項式f(x)是SOS。
引理2[6]:多項式f(x)(d e g (f(x) )=2d)是SOS,當且僅當存在半正定矩陣Q≥0及單項式向量Z(x)( d eg(Z(x))≤d),使得:

考慮一類不確定非線性系統(tǒng)

這里A(x),B(x)為含x的多項式矩陣, ?A(x)和?B(x)分別是函數(shù)矩陣A(x)和B(x)的不確定項;Z(x)為含x的N×1多項式,并且滿足假設3。
假設3[6]:當且僅當x=0時,Z(x)=0 。
定義矩陣函數(shù)M(x)為N×n的多項式矩陣,Mij(x)是矩陣函數(shù)M(x)第(i,j)個元素,定義為:

其中i= 1 ,L ,N,j= 1,Ln。
假設4[10]:

其中:F(x) ∈ ?s×s,其滿足不等式(6):

其中:I是適當維數(shù)的單位矩陣;H∈ ?n×s、E1∈?s×N和E2∈?s×m是 已知的定常數(shù)矩陣。
為找到一個狀態(tài)反饋控制器u=k(x) =F(x)Z(x),使得系統(tǒng)在平衡點x=0穩(wěn)定,所以我們提出定理7。下面的引理對定理7證明有關鍵性作用。
引理5[11]:已知適當維數(shù)的矩陣H、E和Y,其中Y是對稱矩陣,矩陣不等式:

對所有滿足條件(6)的F(x)都成立,當且僅當存在一個標量ε> 0,使得

引理 6[12]:(S c h u r補引理)對于非線性對稱矩陣Q(x) =QT(x)、R(x) =RT(x)和S(x),矩陣不等式
等價于R(x)>0 ,Q(x) ?S(x)R?1(x)ST(x)>0 。
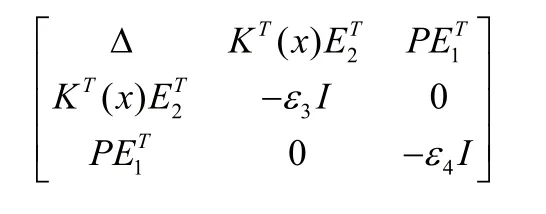
定理7:對于系統(tǒng)(3),假設存在對稱常數(shù)矩陣P,多項式矩陣函數(shù)K(x),常數(shù)ε1>0、ε3>0、ε4>0及正定函數(shù)ε2(x),使得下列矩陣表達式是SOS,
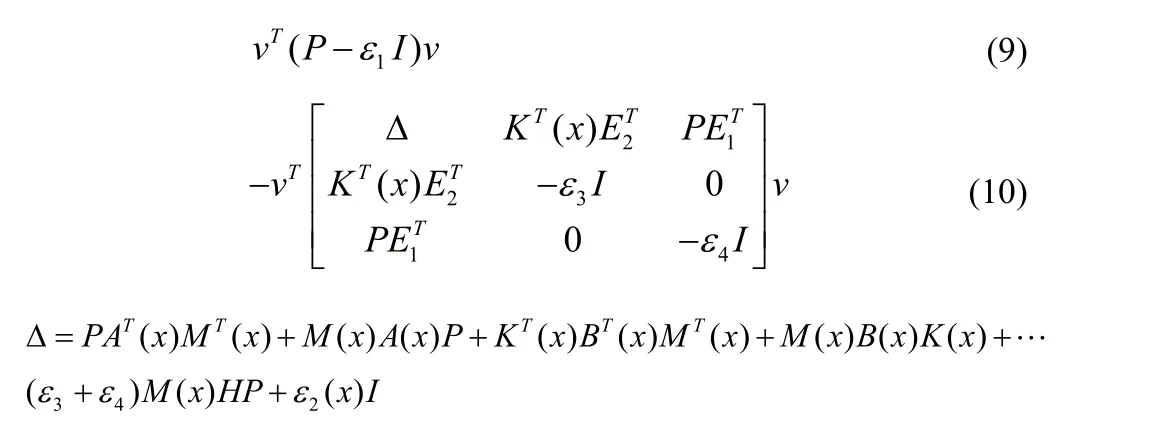
其中:v∈?N,則閉環(huán)系統(tǒng)是穩(wěn)定的,控制器

是系統(tǒng)(3)的一個狀態(tài)反饋控制器。若當x≠0,則ε3(x) > 0,那么閉環(huán)系統(tǒng)全局漸近穩(wěn)定。
證明:假設存在對稱常數(shù)矩陣P和多項式矩陣函數(shù)K(x)滿足式(9),(10)。定義:

下面我們要證明V(x)是下面閉環(huán)系統(tǒng)的李亞譜諾夫函數(shù)。

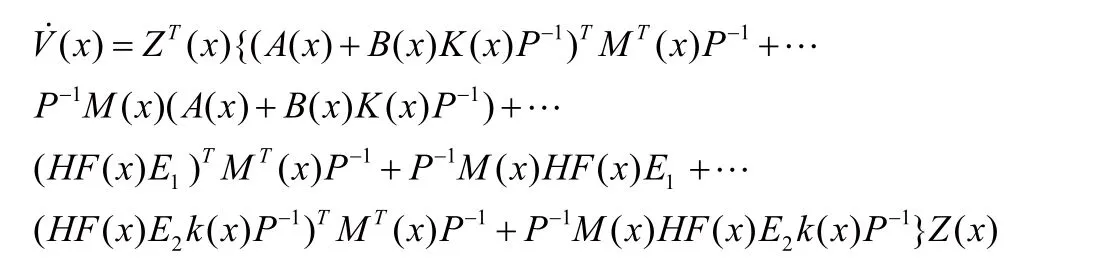
由引理2,條件(9)說明P和P?1對于所有的x都是正定的,所以V(x)也是正定的。沿閉環(huán)系統(tǒng)(12)的任意軌跡,V(x)的時間導數(shù)是:

整理上式,得:
利用引理4和5,可得:
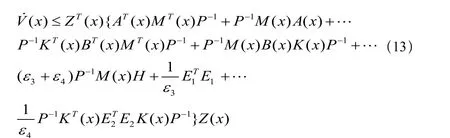
由(10)可知
其中,

是半負定的。利用引理6展開后,再左右同乘P?1,可得到式(13)是半負定的。因此(x)≤0,所以V(x)是該閉環(huán)系統(tǒng)的Laypunov函數(shù),閉環(huán)系統(tǒng)(12)是穩(wěn)定的。如果式(10)中,當x≠0,ε3(x) > 0 ,即V(x)的時間導數(shù)是負定的,閉環(huán)系統(tǒng)(12)全局漸近穩(wěn)定。
3 仿真實例
考慮如下不確定系統(tǒng):
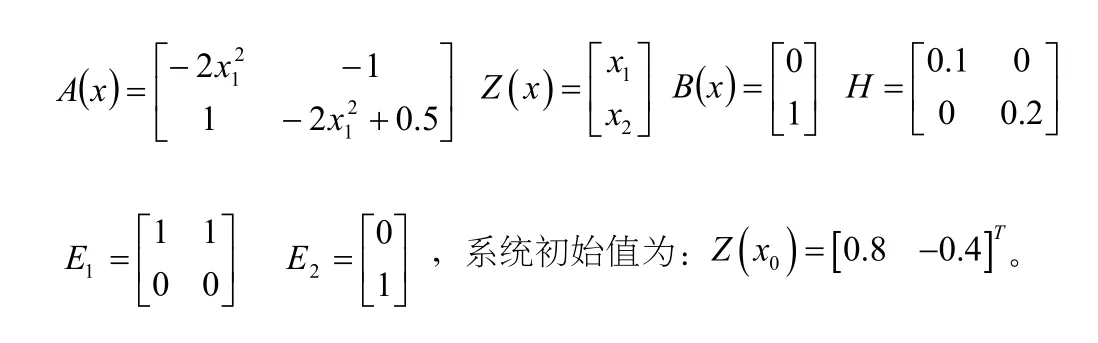
利用定理6設計狀態(tài)反饋控制器,可得
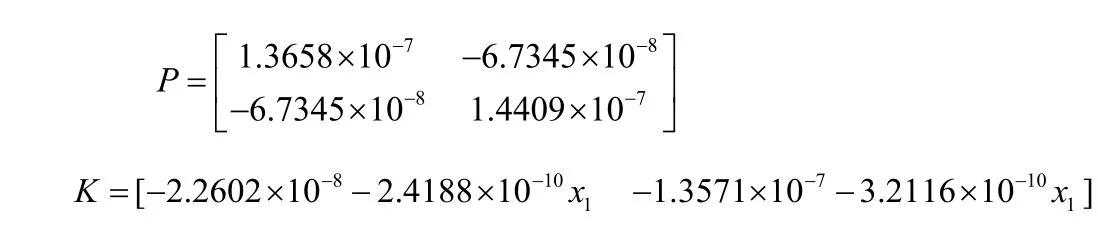
狀態(tài)反饋控制器:

圖1為閉環(huán)系統(tǒng)漸近穩(wěn)定的系統(tǒng)狀態(tài)向量的時間響應圖。
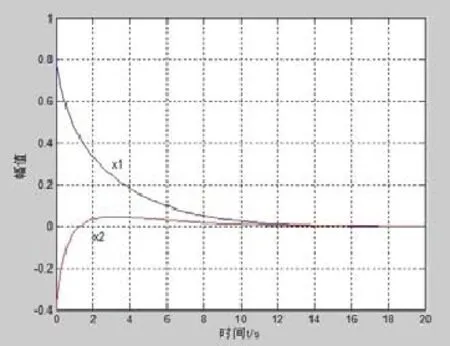
圖1 系統(tǒng)狀態(tài)向量的時間響應圖
從圖1中可以看出用基于SOS理論的方法設計非線性狀態(tài)反饋控制器可以使不確定非線性系統(tǒng)達到穩(wěn)定。
4 結論
針對一類不確定非線性系統(tǒng),利用SOS理論結合Lyapunov函數(shù)的方法,給出了使系統(tǒng)穩(wěn)定的非線性控制器設計方法。利用SOS理論方法不需要對原始模型進行過多的化簡近似,得到的控制器是關于狀態(tài)變量的多項式方程,便于工程執(zhí)行。這彌補了以往設計方法中不能給出使系統(tǒng)有效的控制器設計和求解方法的不足。此外,采用的SOS理論方法彌補了LMI不能計算全局解的不足。仿真結果表明,本文提出基于SOS理論的狀態(tài)反饋控制器設計方法是有效的。
[1]黃琳.穩(wěn)定性與魯棒性的理論基礎[M].北京:科學出版社,2003.
[2]俞立.魯棒控制——線性矩陣不等式處理方法[M].北京:清華大學出版社,2002.
[3]Geromel J C, Korogui R H. Analysis and synthesis of robust control systems using linear parameter dependent Lyapunov functions[J].IEEE Trans on Automatic Control,2006,51(12):1984-1989.
[4]Oliveira Ricardo C L F. LMI conditions for robust stability analysis based on polynomially parameter-dependent Lyapunov functions[J].Systems and Control Letters,2006,55(2): 52-61.
[5]歐陽高翔,倪茂林,孫承啟.基于依參數(shù)Lyapunov函數(shù)的不確定系統(tǒng)魯棒穩(wěn)定控制[J].控制與決策.2008,23(12):1432-1440.
[6]S. Prajna, A. Papachristodoulou, and Fen Wu. Nonlinear control synthesis by sum of squares optimization: a Lyapunov-based approach[C].Proc.of the 5th Asia Control Conference, 2004, pp. 157-165.
[7]Prajna S, Papachristodoulou A, Seiler P, et al. Sostools: Sum of squares optimization toolbox for Matlab[R].California: California Institude of Technology,2004.
[8]Parrilo P A. Structured semidefinite programs and semialgebraic geometry methods in robustness and optimization[D].California: California Institute of Technology,2000.
[9]S. Prajna, A. Papachristodoulou, and P. A. Parrilo. Introducing SOSTOOLS:A general purpose sum of squares programming solver[C].Proc. Of the 41st IEEE Conference on Decision and Control, Las Vegas, Nevada USA,2002,741-746.
[10] Sing Kiong Nguang, Minyue Fu. Robust Control of Systems with Both Norm Bounded and Nonlinear Uncertainties[C].Proceedings of the 32nd Conference on Decision and Control 1993:2561-2566
[11]L. Xie. Output feedback H∞ control of systems with parameter uncertainty[J].Int. J. Contr., 1996,63(4):741-750.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
